Calculate the Grasping Pose and Size of the Object¶
The main function of this procedure is using the target cloud to calculate the grasping pose of it and size of the object. This procedure is usually used in depalletizing. The procedure is shown in Figure 1.
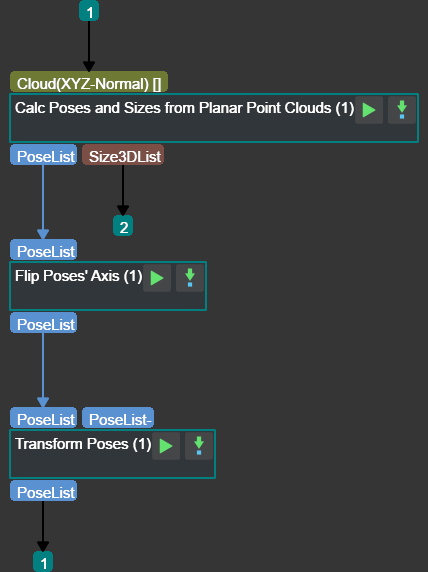
Figure 1 Procedure of calculating the grasping pose and size of the object¶
The role of each step is as follows:
Calc Poses and Dimensions from Planar Point Clouds Take the point clouds as input to calculate the poses and sizes of planar point clouds.
Flip Poses’ Axes Adjust the coordinate axis for inappropriate poses.
Transform Point Clouds Transform the grasping pose from the camera coordinate system to the robot coordinate system (you can also customize the coordinate system transformation).