3D Matching (High Precision)¶
3D matching (high precision) is suitable for projects that need the accurate position of objects. This procedure uses 3D Coarse Matching and 3D Fine Matching which are two calculation methods of the 3D vision processing of matching the workpiece template and the point cloud of the scene to calculate the rough position of the workpiece. And finally obtain more precise pick points by optimizing the matching result . The step procedure is shown in Figure 1.
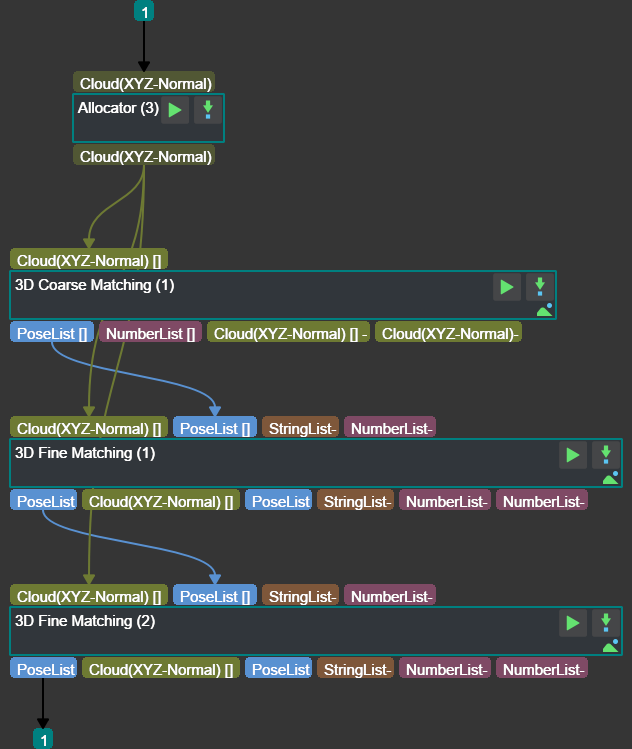
Figure 1 The procedure of 3D matching (high precision)¶
The role of each step is as follows:
Allocator Allocate the input point cloud with normal vector to the subsequent Steps.
3D Coarse Matching Calculate the initial pick points of the object based on the input point cloud with normal vector and the template file in the setting. Then output the result.
3D Fine Matching Based on the input point cloud with normal vector, the initial pick point list from last Step, and the template file in the settings, calculate the more precise pick points of the object and output the result.
3D Fine Matching Based on the input point cloud with normal vector, the result of the previous step, and the template file in the settings, further optimize the pick points and output a more precise pick point list.