Grasp Pose Estimation¶
Function
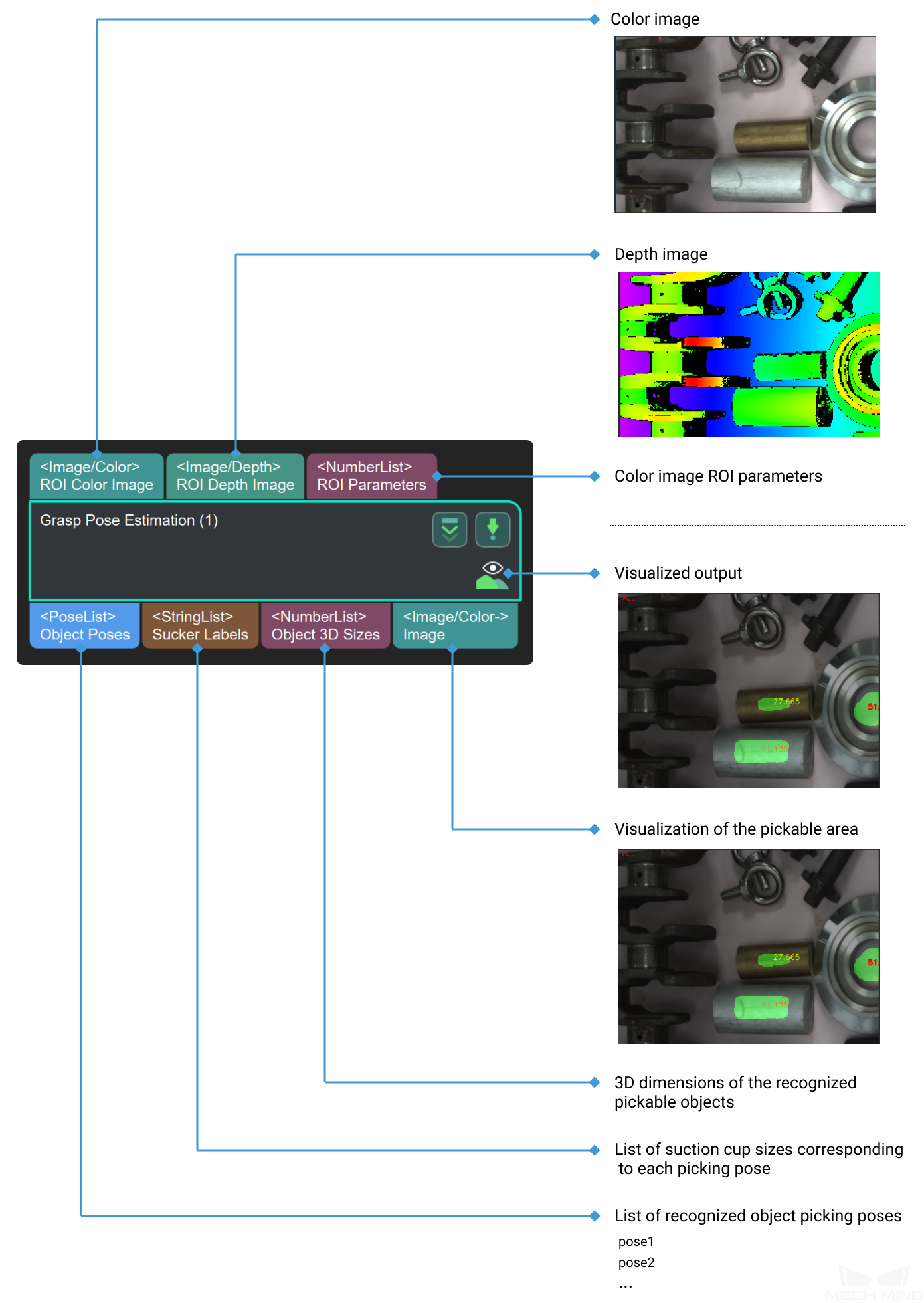
Based on 2D images and 3D depth images, this Step recognizes the pickable objects in the image and outputs corresponding picking poses.
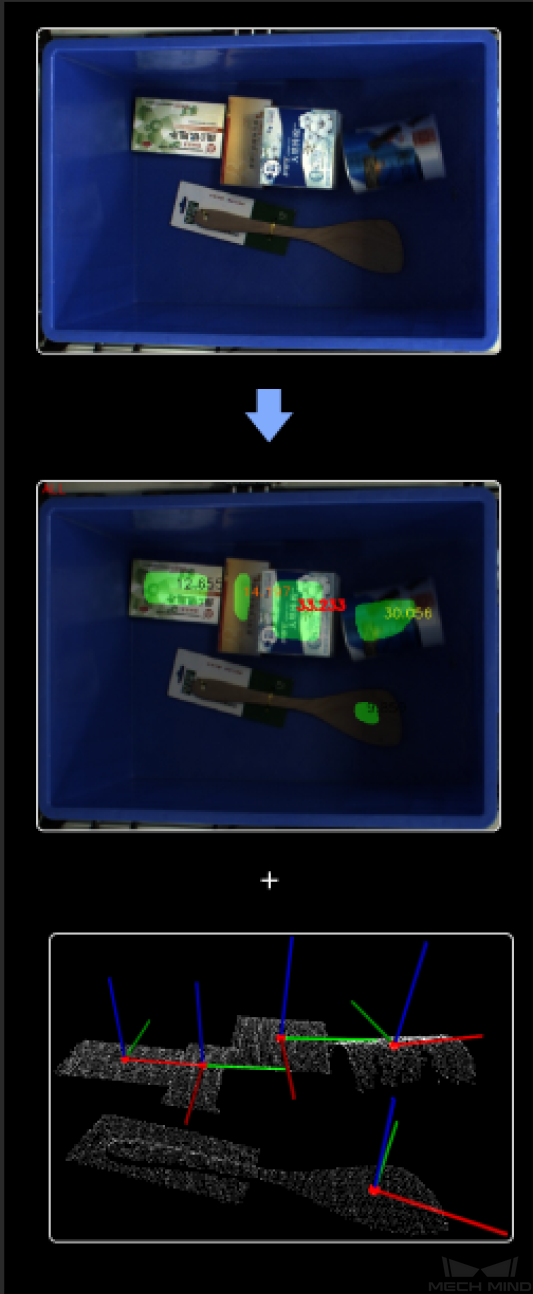
Sample Scenario
This Step is usually used for sorting disparate items heaped or scattered.
Input and Output