Send Point Cloud to External Service¶
Function
Send point cloud information to Mech-Viz.
Sample Scenario
Send point cloud to Mech-Viz for simulation and debugging or for checking the actual point cloud processing results.
Input and Output
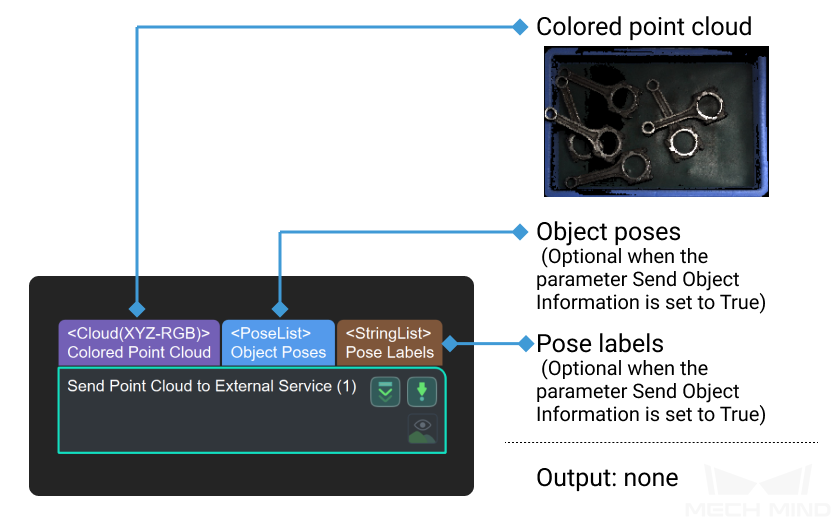
Parameters
Input point cloud type
Default Value: Color Point Cloud (CloudXYZRGB)List of Values: color point cloud (CloudXYZRGB), point cloud (CloudXYZ), normal point cloud (CloudNORMAL)Instruction: The type of point cloud to be sent.Send Object Information
Default Value: FalseList of Values: True, FalseInstruction: Choose whether to send pose and label information according to actual needs.Whether to convert to robot coordinate system
Default Value: TrueList of Values: True, FalseInstructions: If selecting True, the input point cloud information will be converted to the robot coordinate system and then sent to Mech-Viz.