Point Filter¶
Function
Filter points based on the rules specified by the user.

Sample Scenario
This Step is usually used in the point cloud pre-processing phase. It can remove outliers and filter other unwanted points to facilitate subsequent clustering operations on the point clouds.
Input and Output
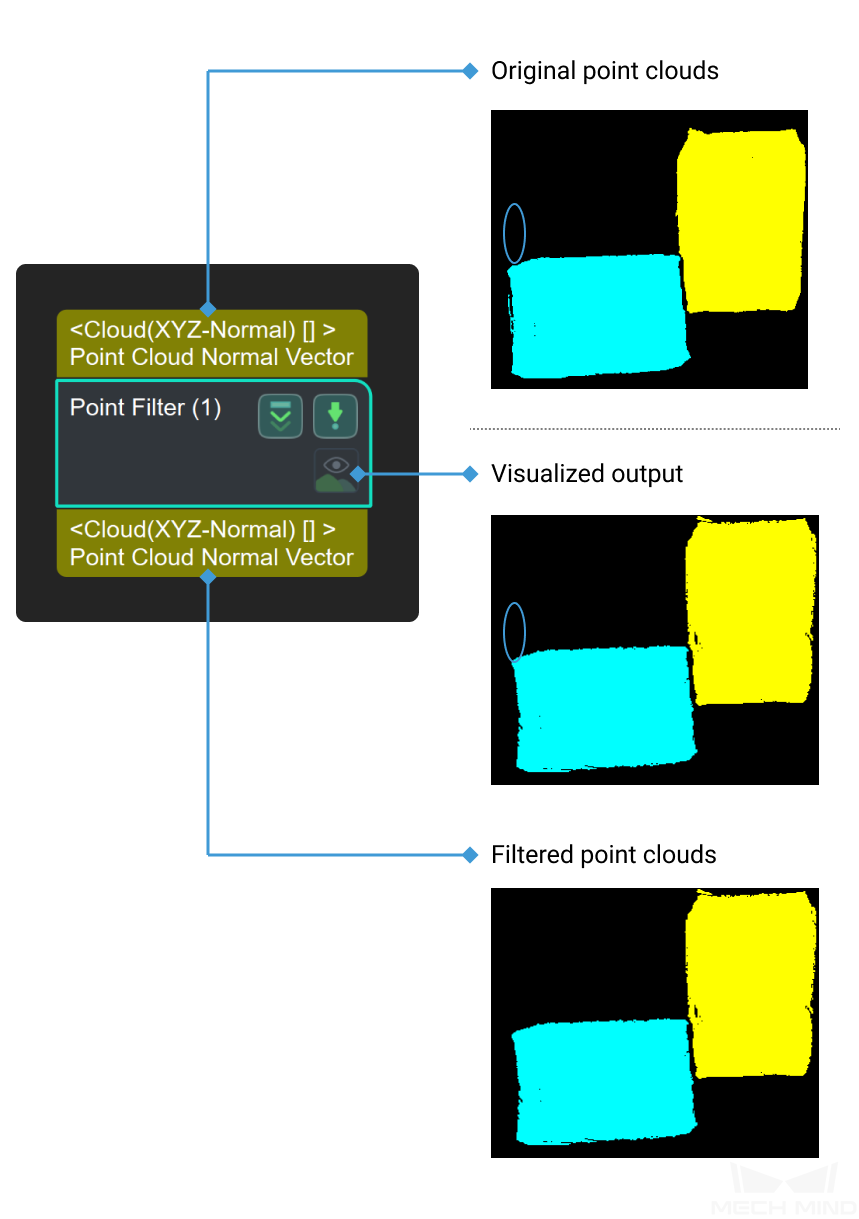
Parameters
Points Filter Type
Default Value: StatisticalOutlierFilterList of Values: StatisticalOutlierFilter, NormalsFilterInstruction: There are two methods for filtering points in the point cloud, which can be selected according to the actual situation of the project:
StatisticalOutlierFilter : Points out of range are excluded according to a given parameter. This method is recommended when the point cloud has obvious outliers. As shown in figure 1. This method parameters are introduced first.
NormalsFilter :The Angle between each point in the point cloud and the reference direction is calculated according to the given reference direction. Points outside the range will be filtered. It is recommended to be used when point clouds need to be layered to avoid conglutination.Shown the red box in figure 2.
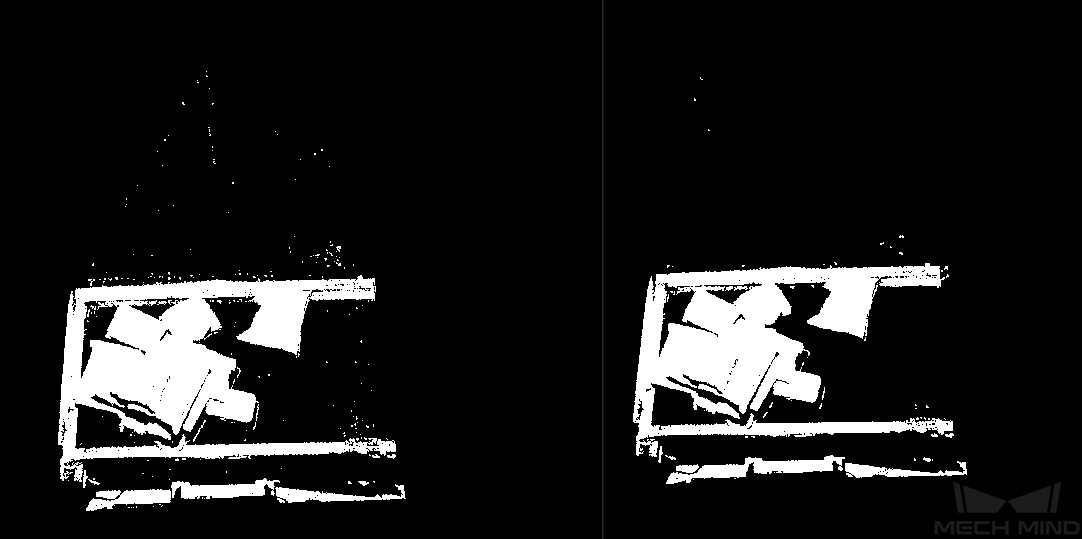
Figure1 StatisticalOutlierFilter Results Comparison¶
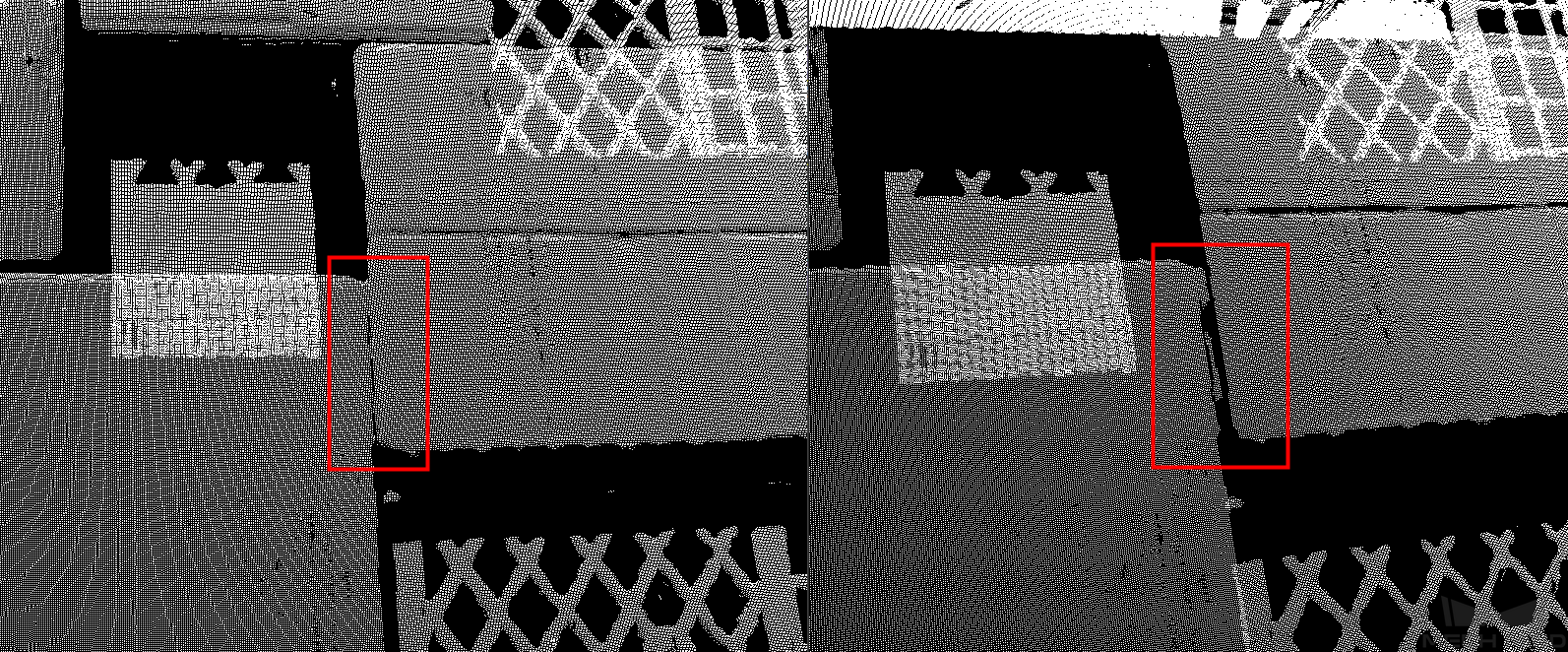
Figure2 NormalsFilter Results Comparison¶
- Mean K
- Stddev Mul Thresh
Reference Direction
- Use Robot Z in Camera
True, Align X Align Y and Align Z is invalid.- Align X
True, the three parameters are invalid and the reference axis is robot Z-axis.- Align Y
- Align Z
Angle Thresholding Settings
- Min Angle
- Max Angle