Calc Poses and Dimensions of Rectangles¶
Function
Calculate the corresponding poses of the rectangles in 3D space by the depth map and rectangle information.
Sample Scenario
Fixedly used with the Step Remove Overlapped Polygons, to calculate the poses of the rectangular objects obtained by 2D Matching in the camera reference frame.
Input and Output
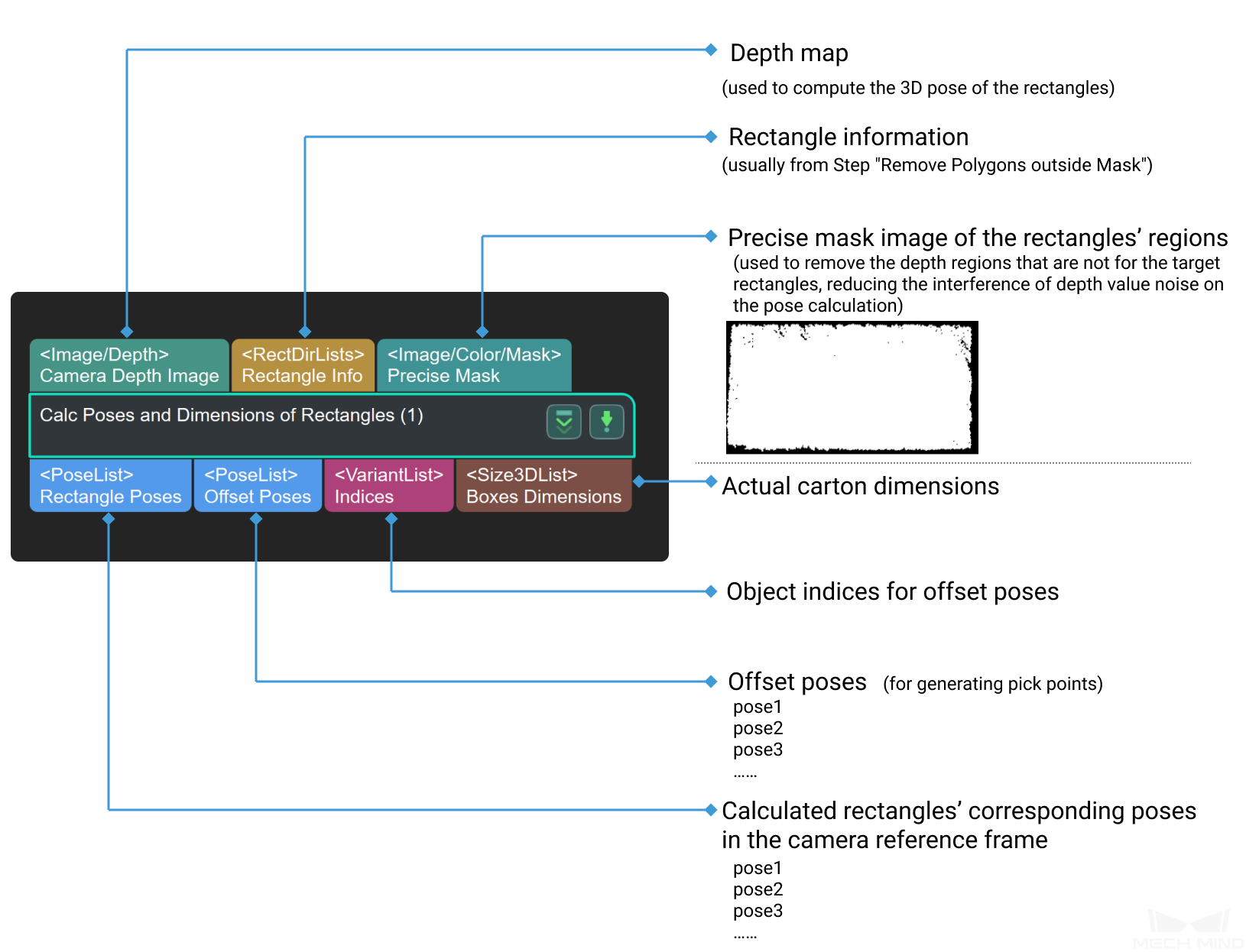
Parameters
inputType
Instruction: This paramater is used to determine the type of input. | Default Value: Depth | Suggested Value: To set according to the real scenarios. | List of Values: Depth,VertexAndSize.InputDepth
searchRadius
Instruction:This parameter is used to adjust the search radius of the depth of the given position in the image(in pixel). The parameter is only valid when inputType is ‘Depth’.Default Value:20Suggested Value:20Valid Range:[0,+∞)suckerLengthX
Instruction:This parameter is used to adjust the size of the area covered by the sucker in X direction(in m). When the size of the sucker is smaller than the target object, the paramater should be decreased in order to avoid sucking the adjacent objects.Default Value:0Suggested Value:To set according to the real scenarios. When the size of the sucker is smaller than the target object, the paramater are suggested to be set to zero.| Valid Range:[0,+∞)suckerLengthY
Instruction:This parameter is used to adjust the size of the area covered by the sucker in Y direction(in m). When the size of the sucker is smaller than the target object, the paramater should be decreased in order to avoid sucking the adjacent objects.Default Value:0Suggested Value:To set according to the real scenarios. When the size of the sucker is smaller than the target object, the paramater are suggested to be set to zero.| Valid Range:[0,+∞)suckerMaskOtherRectRatio
Instruction: This parameter is the upper limit of the overlapping ratio of the sucker and adjacent boxes and decides whether to perform the sucking operation in order to avoid the condition that the adjacent boxes are also be sucked. When the overlapping ratio of the sucker and adjacent boxes is smaller than this value, the sucking operation would be performed.Default Value: 0.3Suggested Value: To set according to the real scenarios.output strategy
outputOnePoseForOneBox
Instruction: This parameter decides whether to output single pose for single box.Default Value: TrueSuggested Value: TrueList of Values: True, False