Common problems about pose transform¶
Description for common problems about pose transform¶
Common problems about pose transform mainly list the common problems in the actual use of the software, and provide the corresponding solutions.
Z-direction downward (pointing to the ground)¶
Problems description: The actual grasping requires that the Z-direction of the object points upward, but sometimes the detected Z-direction of pose points to the ground. As shown in Figure 1.1.
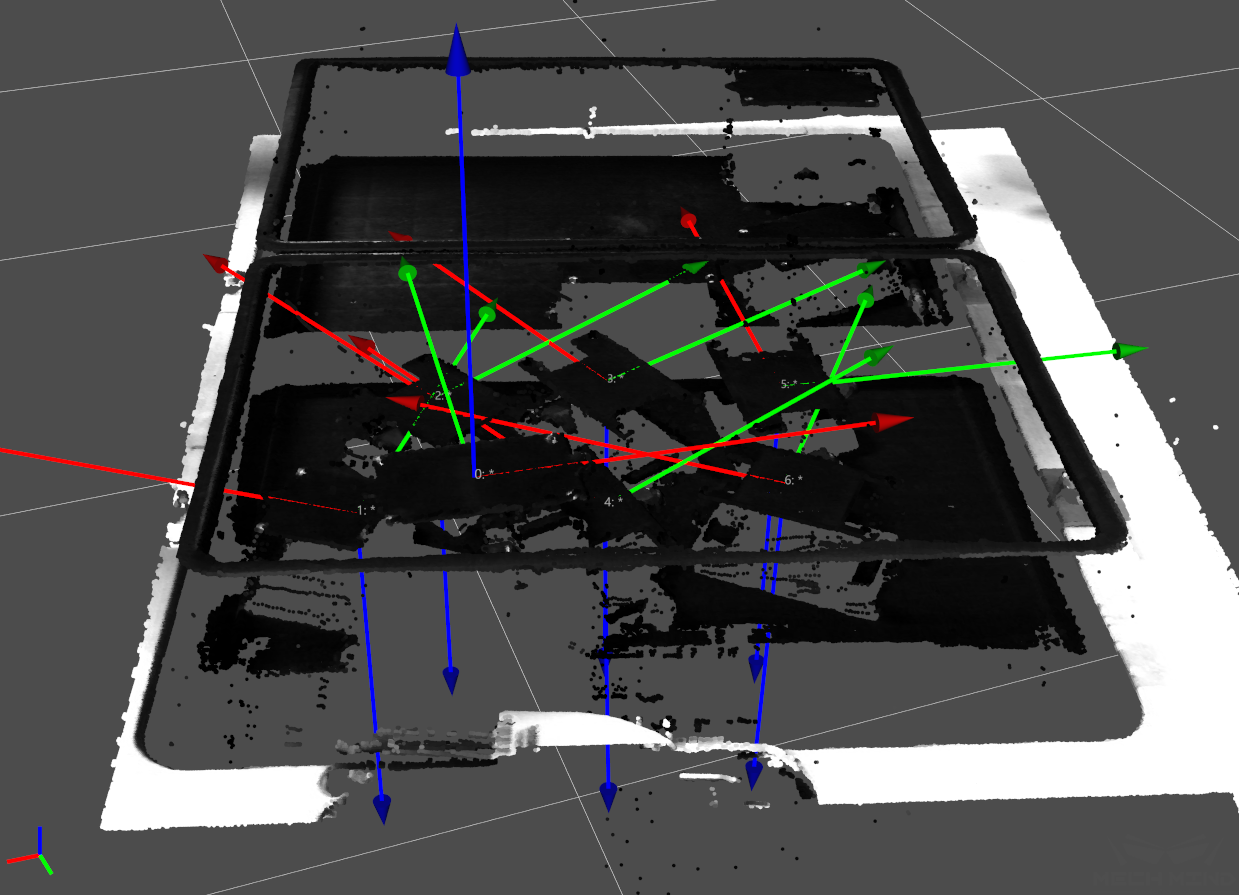
Figure 1.1 Z-direction pointing to the ground¶
Reason: The orientation is not checked and corrected before outputting the pose.
Solution: Add Step Flip Poses’ Axes and set the corresponding parameters. For the results with Z-downward , rotate 180° around the x-axis of the detected poses. The parameters are shown in figure 1.2. The recognition result after adding this Step is shown in figure 1.3.
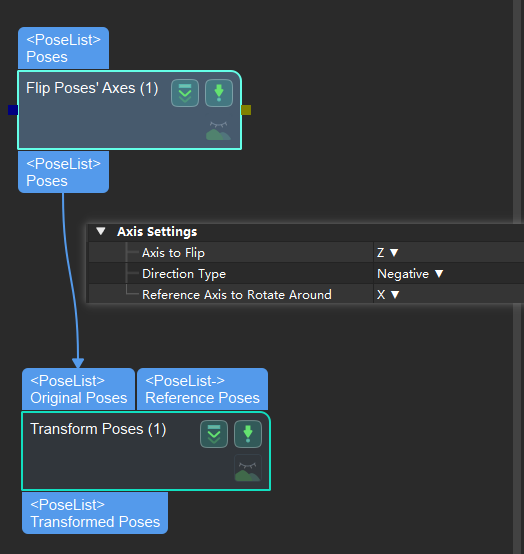
Figure 1.2 Parameters for Step “Flip Axis Direction”¶
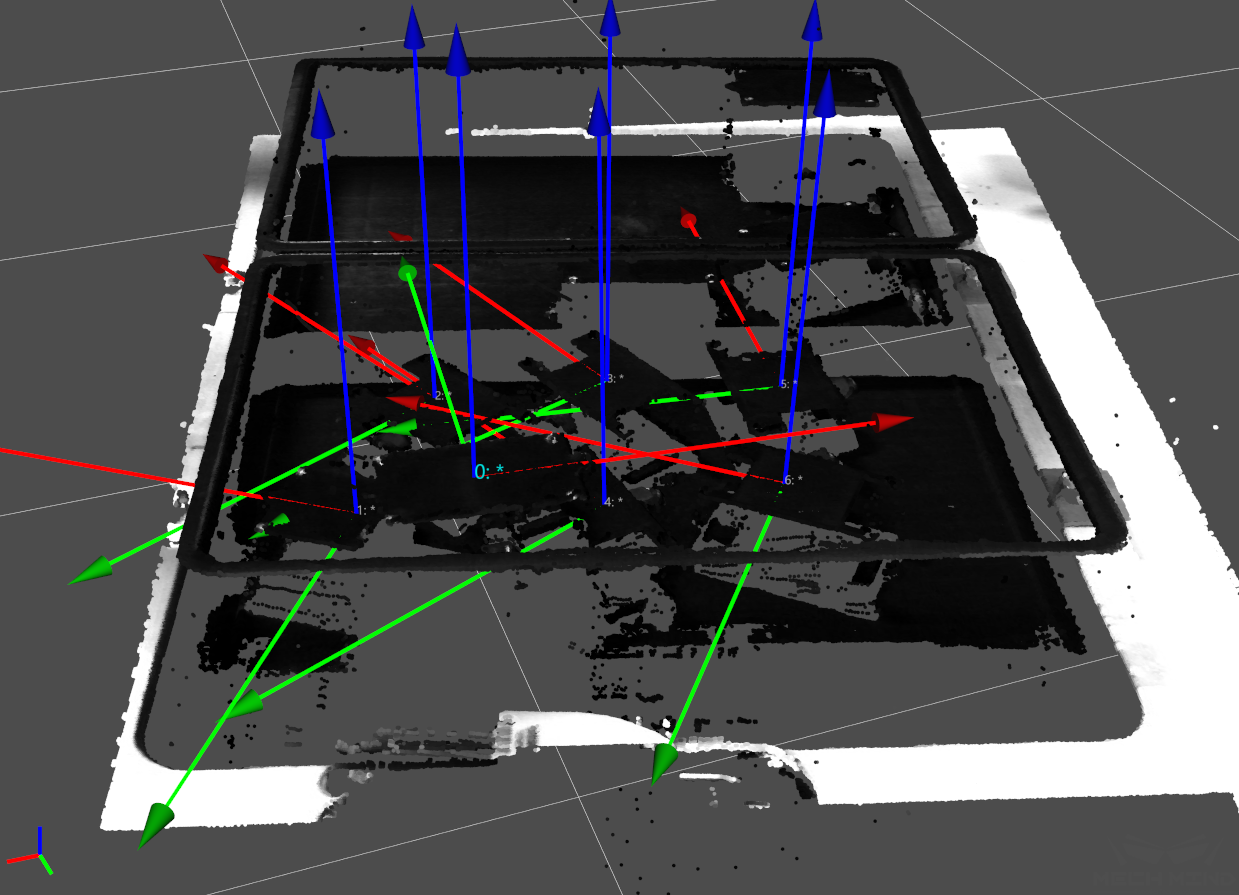
Figure 1.3 Correct recognized result on Z-direction¶