Optimize Motion Trajectory¶
This section describes how to optimize the robot’s trajectory through the following steps to make the trajectory more efficient.
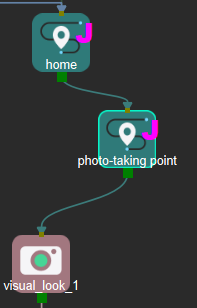
1. Add a photo-taking point.
Add a photo-taking point between the Home point and the picking point.
Use the teach pedant to let the robot move to a point to facilitate photo-taking.
Hint
Please note that at the photo-taking point, the robot cannot block the camera’s field of view. You can use Mech-Eye Viewer to capture images and check if the robot blocks the field of view.
Add a move task to record the current pose of the robot, and set the task’s name to photo-taking point.
2. Add a relative move point.
A reasonable movement for picking should be that the suction cup moves vertically down to the pick point, holds the object, and moves vertically up.
You can use a relative_move task for this purpose.
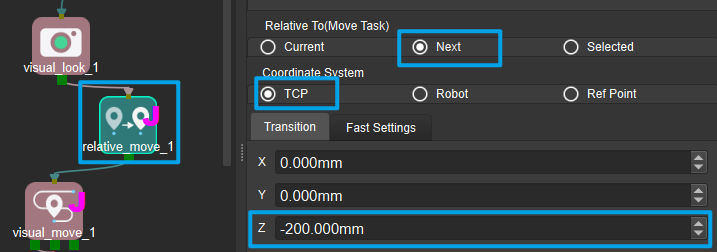
The suction cup moves vertically downward from 200 mm from the pick point in the Z direction.
Find: and drag it to the workspace.
Parameter setting:
Under Relative To (Move Task), select Next.
Under Transition, set the value of Z to -200.
Keep the default value for the rest of the settings.
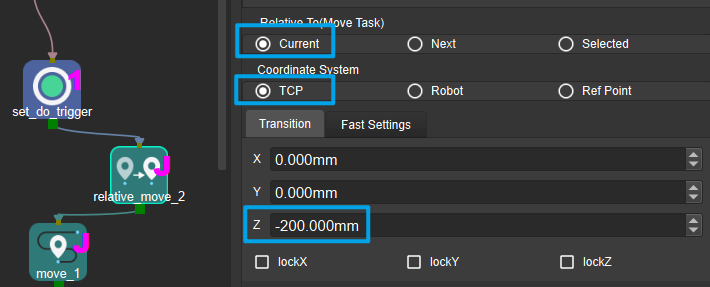
The suction cup moves vertically upward for 200 mm after picking up the object.
Find , drag it to the workspace.
Parameter setting:
Under Relative To (Move Task), select Current.
Under Transition, set the value of Z to -200.
Keep the default value for the rest of the settings.
3. Add a placing relative move point.
Add two relative move tasks.
The suction cup moves vertically downward from 200 mm up from the placing point.
Under Relative To (Move Task), select Next.
Under Transition, set the value of Z to -200.
Keep the default value for the rest of the settings.
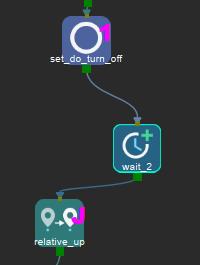
After the suction cup releases the object, it moves vertically upward for 200 mm.
Under Relative To (Move Task), select Current.
Under Transition, set the value of Z to -200.
Keep the default value for the rest of the settings.
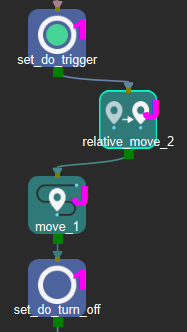
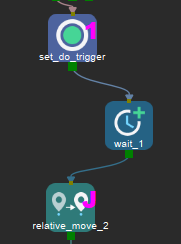
4. Add a wait task for picking and placing.
After the suction cup touches the object, the program needs to wait for a little while for the suction cup to firmly hold the object.
Use a wait task to make the robot wait for a specified time. The unit is ms.
Find , drag it to the workspace, and keep the default parameter settings.
After the suction cup is turned off to release the object, the program needs to wait for a while to let the suction cup to fully release the object.
5. Simulate
Click on Simulate to start simulating the motion trajectory of the robot.
In the simulation this time, you can find that the trajectory is more reasonable. Please proceed to the next section.