Use Mech-Center to Control a Real Robot to Pick¶
So far, you have successfully obtained the box poses and successfully simulated the picking and placing of a box. Now you can try running the real robot to physically implement the picking and placing for the first time.
1. Adjust the robot’s speed.
In the toolbar, adjust the Robot Speed to 5%.
Attention
Be sure to turn down the robot movement speed!
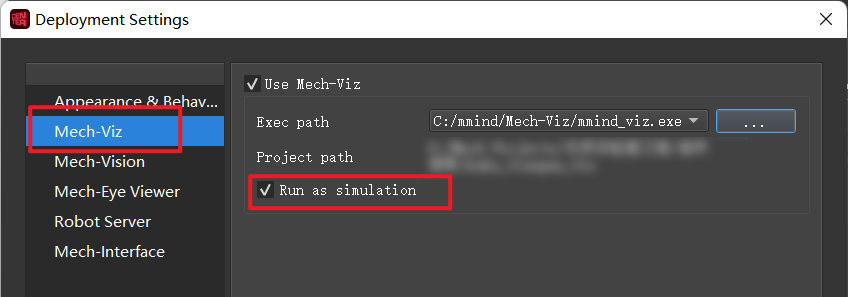
2. Uncheck Run as simulation.
3. Run
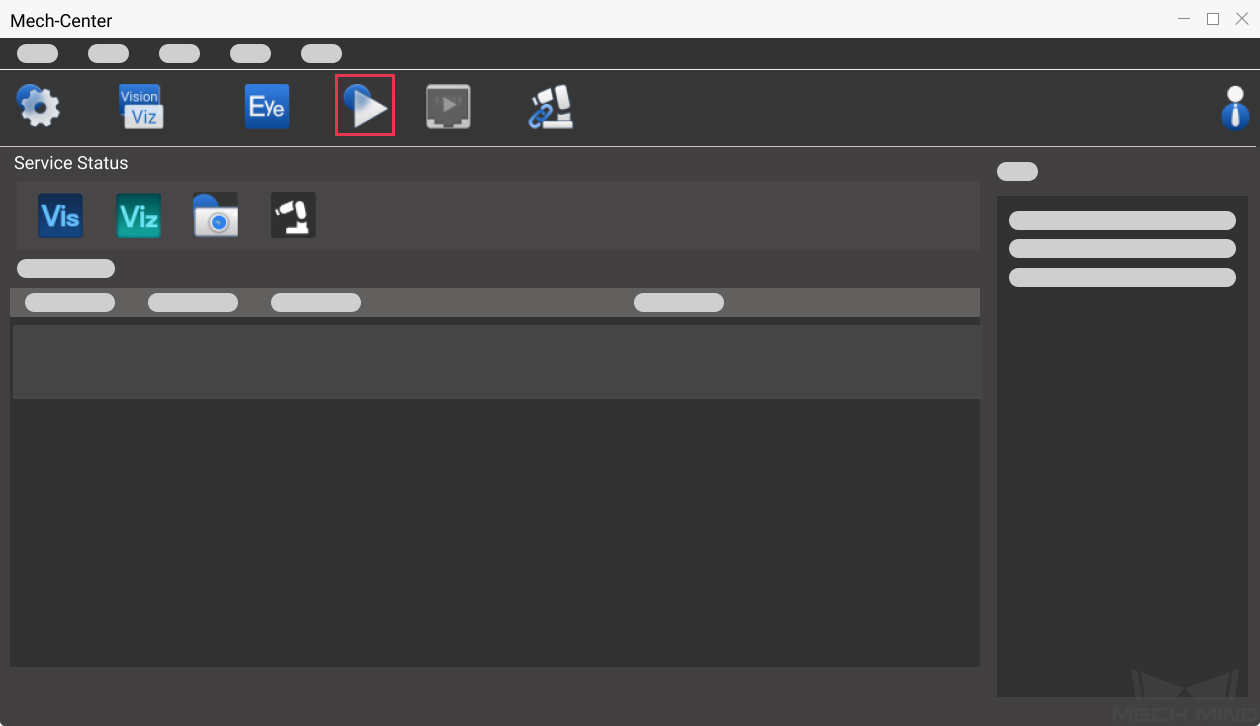
If the robot moves according to the planned trajectory and picks up and places the box, then you have successfully completed the first pick and place.
Attention
When running the robot, please ensure personnel safety. When an emergency occurs, please press the emergency stop button on the teach pendant!