마스터 컨트롤 통신 설정(RobotWare 7)
복제하기 전 준비

파일을 로봇에 복제하기
사전 준비
Mech-Vision과 Mech-Viz 소프트웨어의 설치 디렉터리에 있는 통신 구성 요소/Robot_Server/Robot_FullControl/abb/RobotWare 7 폴더 속에 아래와 같은 파일들을 USB에 복사하십시오.
| 폴더 | 설명 |
|---|---|
config_robware7 |
마스터 컨트롤에 필요한 신호, 자동 로딩 모듈 및 작업 유형을 정의하는 로봇 구성 파일입니다. |
MM_robware7 |
로봇 프로그램 모듈 |
백업
오작동 후 로봇 시스템을 복원하기 위해 복제를 시작하기 전에 백업을 만드십시오.
-
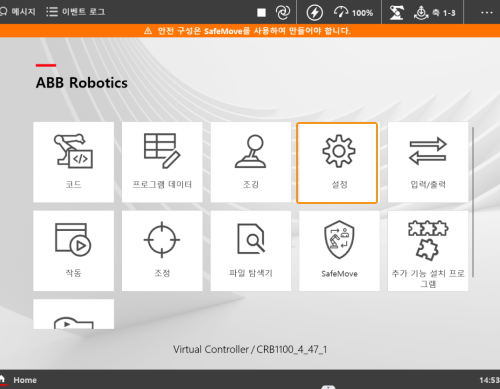
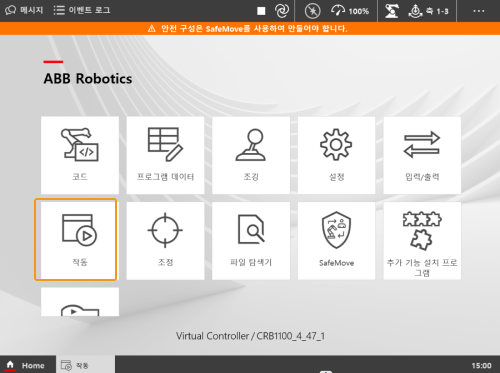
Home 화면에서 를 클릭하십시오.

-
백업 인터페이스에서 명칭과 경로를 수정한 후 백업 버튼을 클릭하십시오.

-
팝업 창에서 확인 버튼을 클릭하면 백업 작업이 완료됩니다.

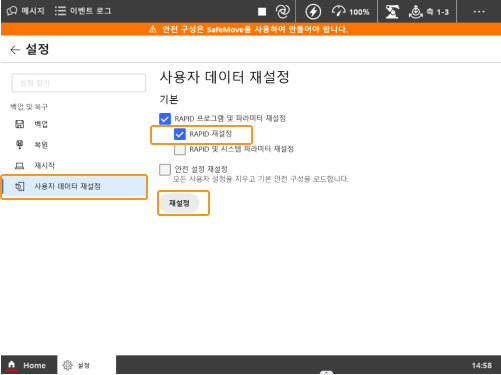
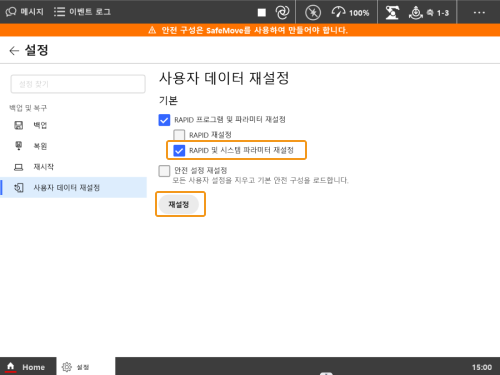
재설정
|
재설정은 시스템 재설정*과 *RAPID 재설정 두 가지 경우가 있습니다.
|
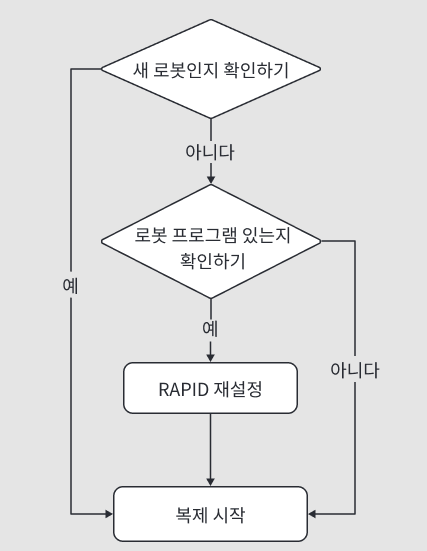
복제 시작
시작하기 전에 로봇 시스템에 Wizard를 사용하여 생성된 프로그램이 없는지 확인하십시오. Wizard는 그래픽 모듈을 끌어서 놓아 애플리케이션을 빠르게 생성할 수 있는 그래픽 프로그래밍 방법입니다. 로봇 시스템에 Wizard 프로그램이 있는 경우 *RAPID 재설정*해야 합니다. 또한, 복제가 완료된 후에는 Wizard 프로그래밍을 사용하지 마십시오.
-
RobotStudio를 엽니다. 네트워크 케이블이 로봇 제어 캐비닛의 WAN 포트에 연결되어 있으므로 아래 그림과 같이 컨트롤러를 추가하면 컨트롤러 관리 포트에 자동으로 연결됩니다.

-
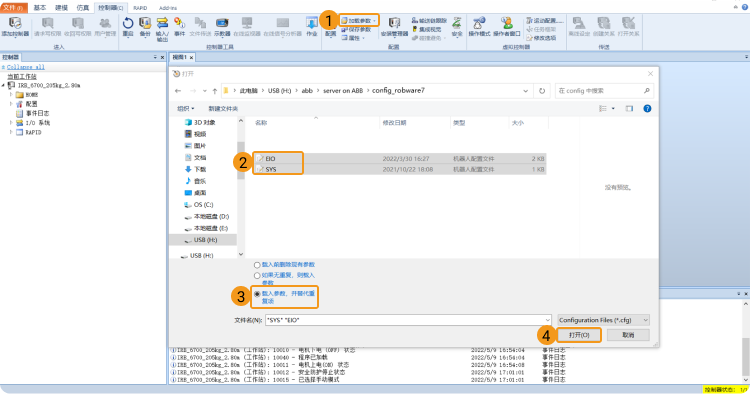
아래 그림의 프로세스에 따라 config_robware7 폴더 아래에 두 개의 구성 파일을 도입하십시오.
작업 현장에서 DSQC 1030 보드를 사용하는 경우 DSQC1030.cfg, SYS.cfg를 선택하십시오.
-
팝업 창에서 각각 확인 버튼을 클릭하십시오.

-
아래 그림과 같이 MM_robware7 폴더 전체를 로봇 시스템의 HOME 데렉터리에 복사하십시오.

-
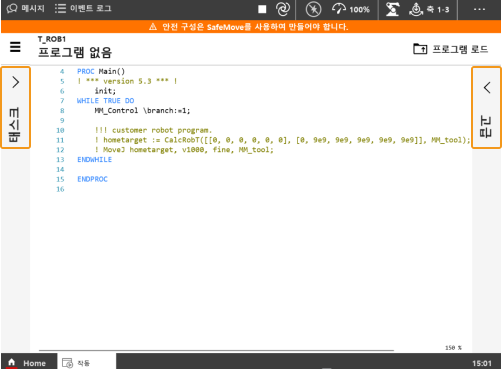
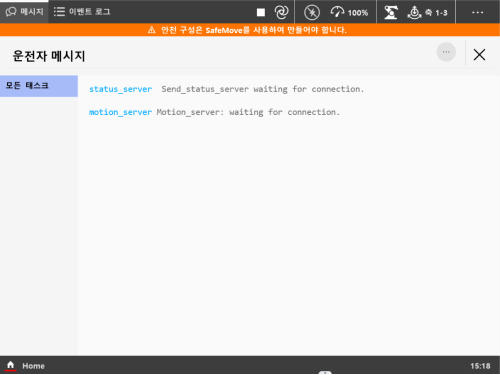
다름 그림에 따라 RapidSockets 네트워크 서비스를 시작하십시오.

-
safe_area.mod 프로그램에서 안전 영역의 범위는 현장 로봇의 작업 영역(단위: mm)에 따라 수정할 수 있습니다.
-
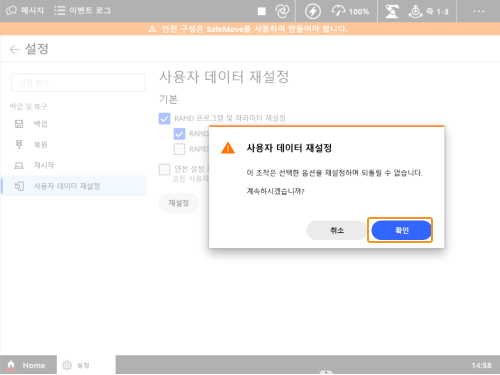
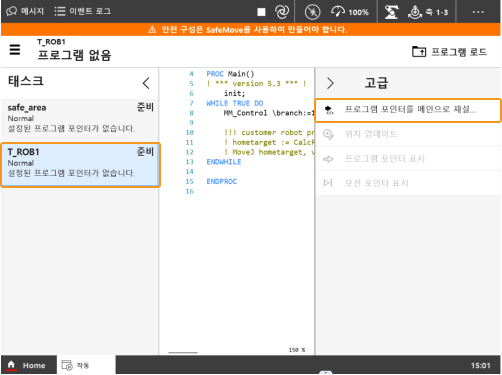
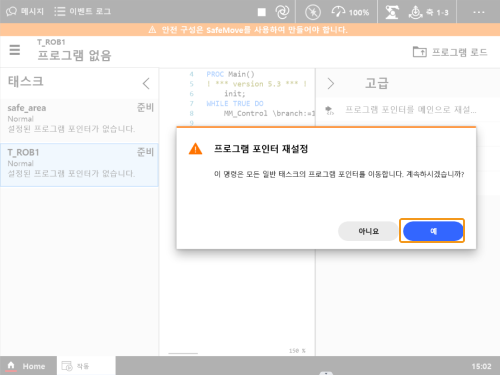
재설정 버튼을 클릭하여 복제 작업이 완료됩니다.

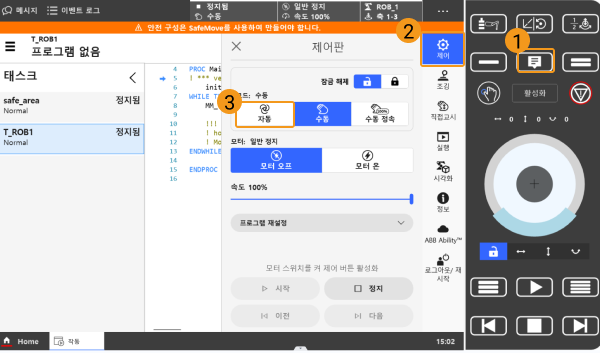
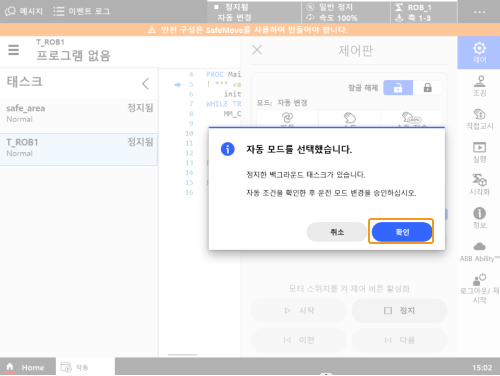
마스터 컨트롤 통신 테스트
시작하기 전에 다음 주의사항을 확인하시기 바랍니다.
-
이름이 같은 Main 프로그램이 로봇 시스템에 존재하지 않는지 확인하십시오. 이름이 같은 Main 프로그램이 있으면 다른 이름으로 변경해 주시고, 같은 이름의 프로그램이 나타나지 않도록 해주십시오.
-
StopMove 명령에는 Quick 속성이 없습니다.
문제 해결
복제가 완료된 후에도 정상적으로 연결될 수 없는 경우 다음 사항을 확인해 주시기 바랍니다.
-
IPC:
-
방화벽이 꺼져 있는지 확인하십시오.
-
CMD 명령 프롬프트를 통해 로봇 IP를 핑(ping)할 수 있는지 확인하십시오.
-
다른 바이러스 백신 소프트웨어의 영향이 없는지 확인하십시오.
-
서로 다른 IP 네트워크 세그먼트에 있는 IPC의 두 네트워크 포트 간에 충돌이 없는지 확인하십시오.
-
만약 IPC가 라우터를 통해 연결되어 있으면, 다른 네트워크 케이블로부터의 간섭이 없는지 확인해야 합니다.
-
-
로봇:
-
네트워크 케이블이 컨트롤러의 WAN 포트에 올바르게 연결되어 있는지 확인하십시오.
-
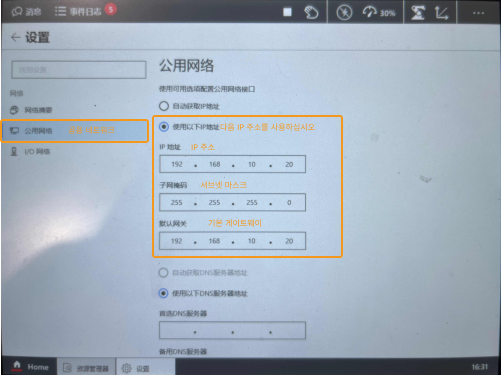
로봇의 IP 설정이 올바른지, 다른 네트워크 포트가 아닌 WAN 포트 IP가 수정되었는지 확인하십시오.
-
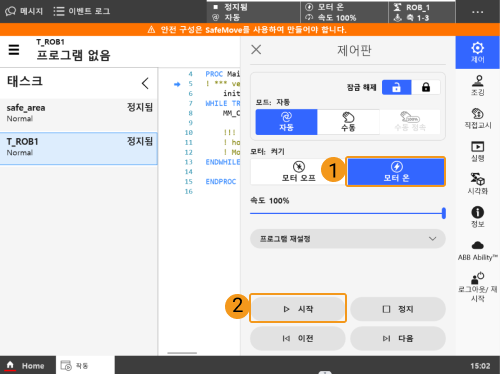
로봇이 "프로그램 실행" 작업을 수행했는지 확인하십시오.
-