ABB RobotWare 7 표준 인터페이스 통신 구성
이 부분에서는 로봇 표준 인터페이스 프로그램을 ABB RobotWare 7 로봇에 복제하고 Mech-Mind Robotics 비전 시스템과 로봇 간의 표준 인터페이스 통신 구성을 완료하는 방법에 대해 소개합니다.
| 표준 인터페이스 프로그램을 복제하는 것은 로봇의 표준 인터페이스 프로그램과 구성 파일을 로봇 시스템으로 도입하여 비전 시스템과 로봇 간의 표준 인터페이스 통신을 실현하는 것입니다. |
복제하기 전 준비
하드웨어 및 소프트웨어 버전 확인
-
컨트롤러가 OmniCore인지 확인하십시오.
-
RobotWare 버전이 7.3보다 높은지 확인하십시오.
단번 클릭하여 방법을 확인하십시오.
-
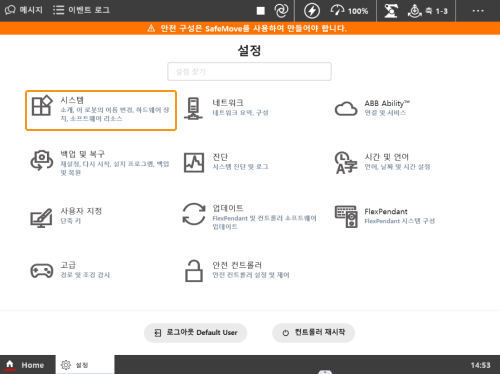
티치 펜던트의 Home 화면에서 을 클릭하십시오.

-
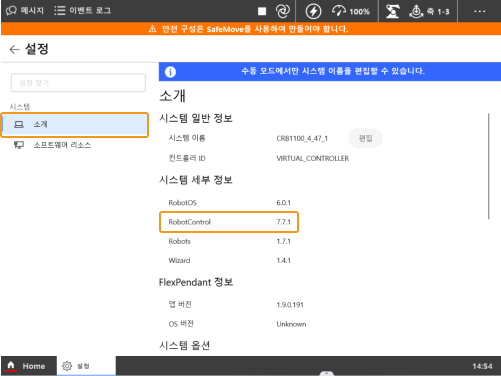
비전에 대하여를 클릭하고 시스템 세부 정보에서 RobotControl(즉 RobotWare) 버전이 7.3보다 높은지 확인합니다.
-
| 위의 조건이 충족되지 않으면 비전 시스템이 로봇과 표준 인터페이스 통신을 할 수 없으므로 로봇 제조사에 문의하여 해결하시기 바랍니다. |
네트워크 연결 설정
하드웨어 연결
아래 그림과 같이 네트워크 케이블의 한쪽 끝을 IPC의 네트워크 포트에 삽입하고, 다른 쪽 끝을 로봇 컨트롤러 캐비닛의 WAN 네트워크 포트에 삽입합니다.

| 네트워크 케이블은 반드시 WAN 포트에 연결되어야 합니다. |
IP 주소 설정
-
티치 펜던트의 Home 화면에서 를 클릭하십시오.

-
공용 네트워크를 클릭하고 다음 IP 주소 사용을 선택한 후 IP 주소, 서브넷 마스크 및 기본 게이트웨이를 입력합니다.

IP 주소를 설정할 때 로봇의 WAN 포트의 IP 주소와 LAN 포트의 IP 주소를 구별하는 데 주의하십시오. -
IPC의 IP 주소를 설정합니다.
IPC의 IP 주소와 로봇의 IP 주소는 동일한 네트워크 세그먼트에 있어야 합니다. 즉, 두 IP 주소의 네트워크 부분과 서브넷 마스크가 동일해야 합니다. 예를 들어, 192.168.100.169/255.255. 255.0 및 192.168.100.170/255.255.255.0은 동일한 네트워크 세그먼트에 있습니다.
“로봇 통신 구성”을 설정하기
Unresolved include directive in modules/standard-interface-robot/pages/abb-robotware7.adoc - include::../partials/config-tcp-protocol.adoc[]
백업
오작동 후 로봇 시스템을 복원하기 위해 로봇 실행을 시작하기 전에 백업하십시오.
-
티치 펜던트의 USB 인터페이스에 USB를 삽입합니다.
-
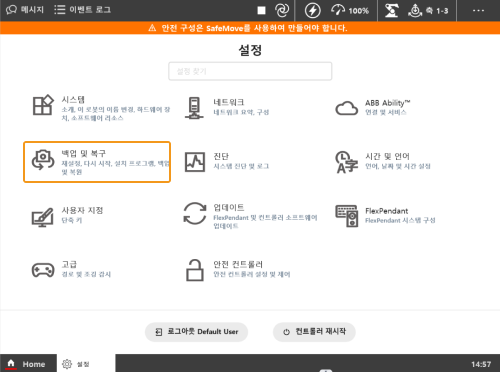
티치 펜던트의 Home 화면에서 를 클릭하십시오.
-
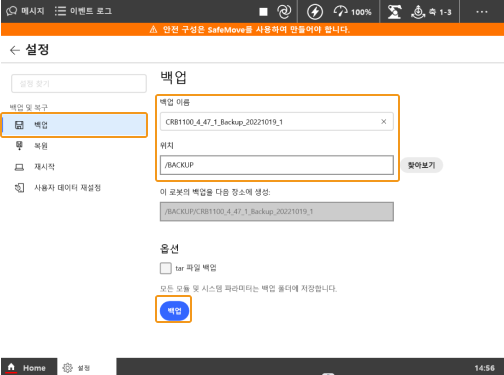
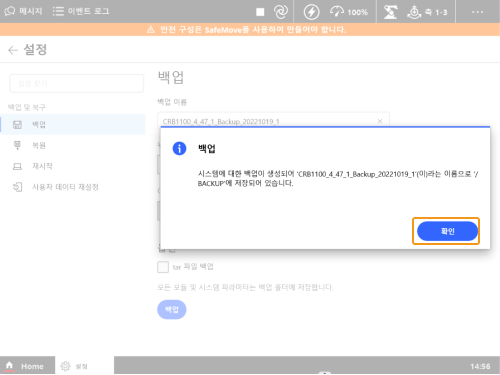
왼쪽에서 백업을 선택하고 백업 이름과 위치를 수정한 후 마지막으로 백업을 클릭합니다.
-
팝업 창에서 확인 버튼을 클릭하면 백업 작업이 완료됩니다.
재설정
재설정은 RAPID 재설정과 시스템 재설정 두 가지 경우가 있습니다.
| 마스터 컨트롤 프로그램이 이미 복제된 경우 반드시 이 스텝을 수행하여 마스터 컨트롤 프로그램을 삭제하고, 마스터 컨트롤 프로그램과 표준 인터페이스 프로그램을 혼합하지 마십시오. |
-
RAPID 재설정하면 현재 RAPID 프로그램과 데이터가 삭제되지만 시스템 파라미터 설정은 유지됩니다.
단번 클릭하여 방법을 확인하십시오.
-
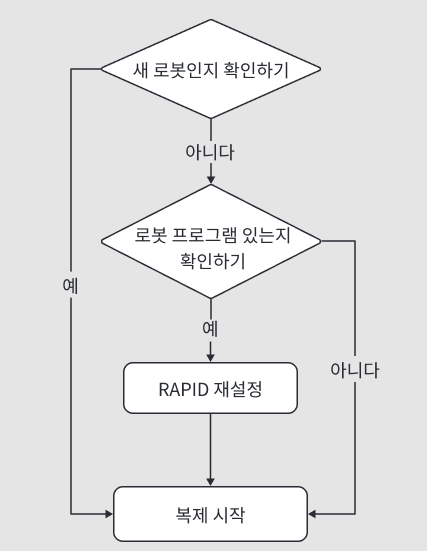
다음 로직 다이어그램에 따라 RAPID 재설정해야 할지 여부를 판단하십시오.
-
티치 펜던트의 Home 화면에서 를 클릭하십시오.
-
왼쪽의 사용자 데이터 재설정을 선택하고 RAPID 재설정을 선택한 후 재설정을 클릭합니다.

-
다음 팝업 창에서 획인 버튼을 클릭하십시오.

-
-
시스템 재설정하면 공장 시스템 파라미터와 RAPID 프로그램이 복원되고 IO 구성도 재설정됩니다. 보드나 기타 통신 장치가 있는 경우에는 시스템을 재설정한 후 다시 구성해야 합니다. 따라서 시스템 재설정을 신중하게 사용하십시오.
단번 클릭하여 방법을 확인하십시오.
-
티치 펜던트의 Home 화면에서 를 클릭하십시오.
-
왼쪽의 사용자 데이터 재설정을 선택하고 RAPID 재설정 및 시스템 파라미터를 선택한 후 재설정을 클릭합니다.

-
다음 팝업 창에서 획인 버튼을 클릭하십시오.
-
RapidSockets 네트워크 서비스 활성화
-
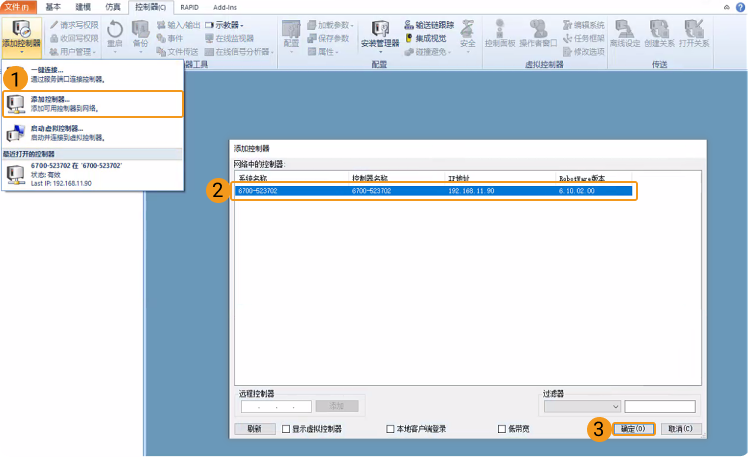
RobotStudio를 엽니다. 네트워크 케이블이 로봇 제어 캐비닛의 WAN 포트에 연결되어 있으므로 아래 그림과 같이 컨트롤러를 추가하면 컨트롤러 관리 포트에 자동으로 연결됩니다.
-
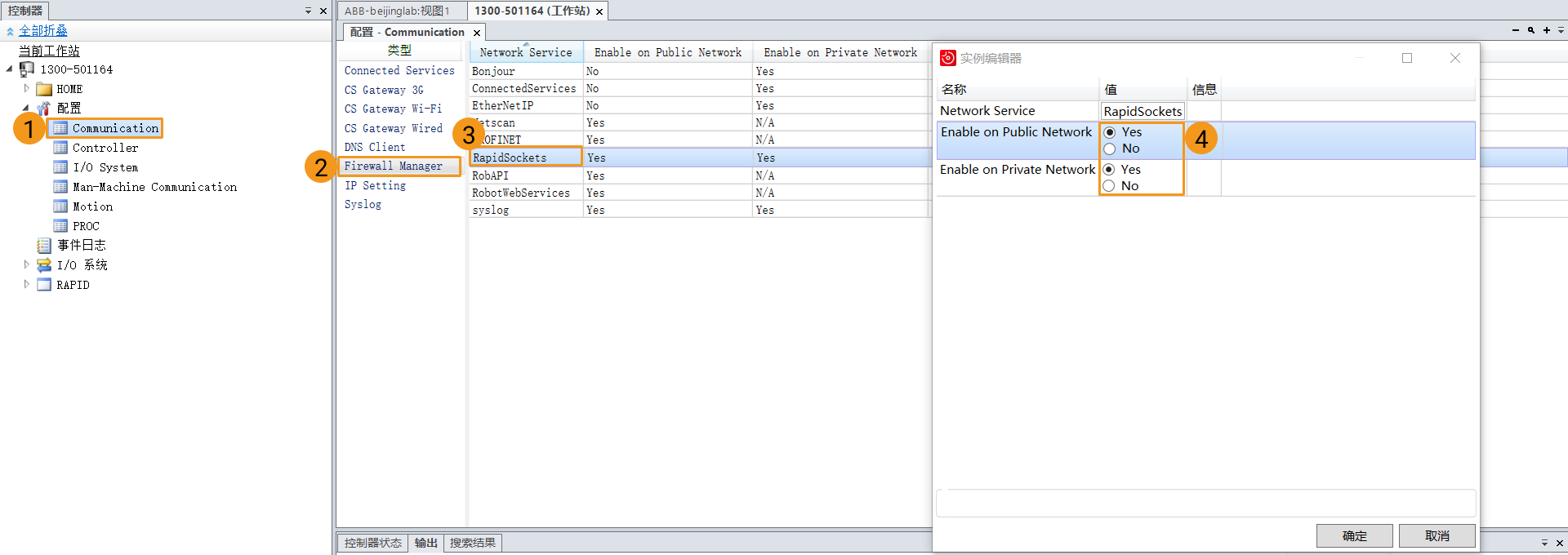
다음 그림에 따라 RapidSockets 네트워크 서비스를 시작합니다.
-
다시 시작을 클릭하면 컨트롤러가 다시 시작될 때까지 위의 변경 사항이 적용되지 않습니다.

프로그램 파일 복제를 준비하기
-
IPC 또는 다른 컴퓨터의 USB 인터페이스에 USB를 삽입합니다.
-
복제 파일을 다운로드를 클릭하여 압축된
ABB.zip파일을 풉니다. -
압축을 푼
ABB폴더에 들어가서 그 안의 모든 파일을 USB에 복사합니다.파일 접미사는 .modx여야 합니다.
파일을 로봇에 복제하기
-
티치 펜던트의 USB 인터페이스에 USB를 삽입합니다.
-
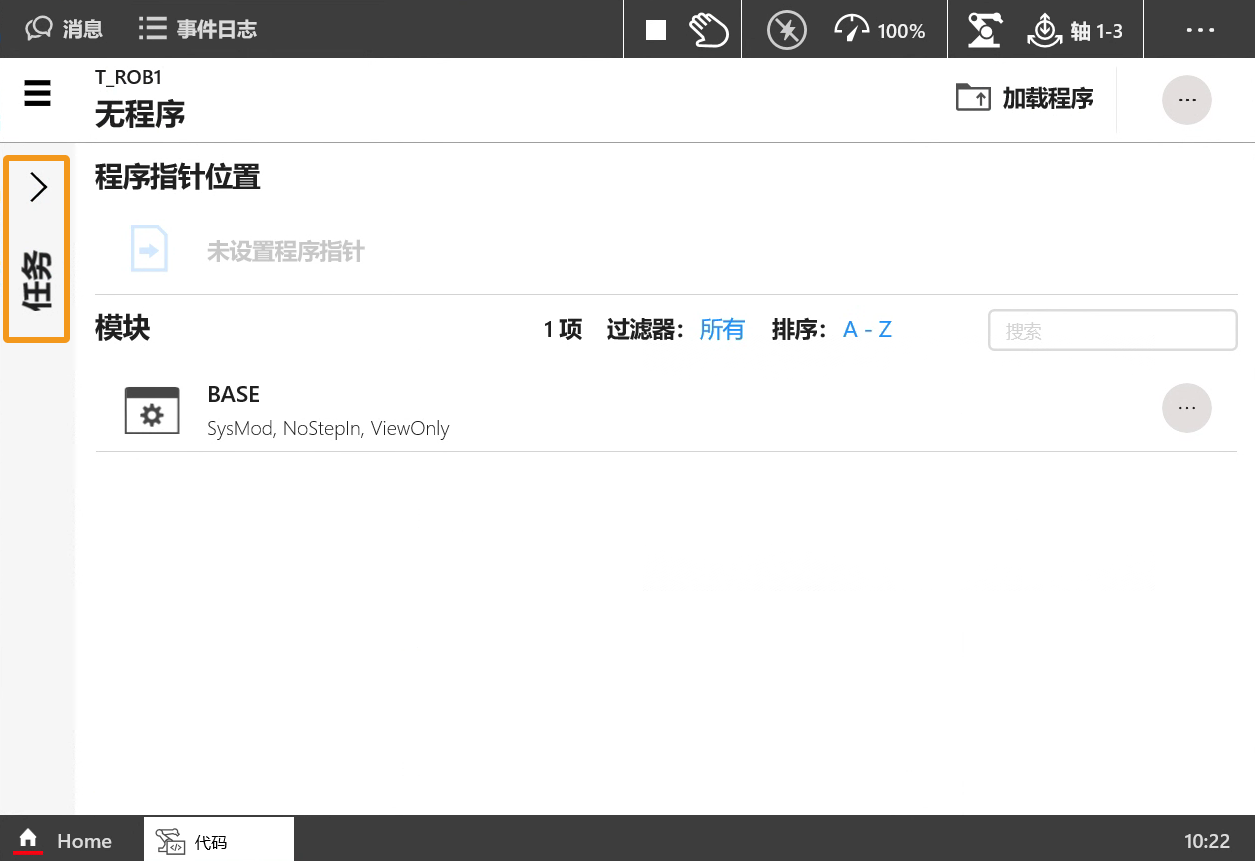
티치 펜던트의 Home 화면에서 코드를 클릭하십시오.

-
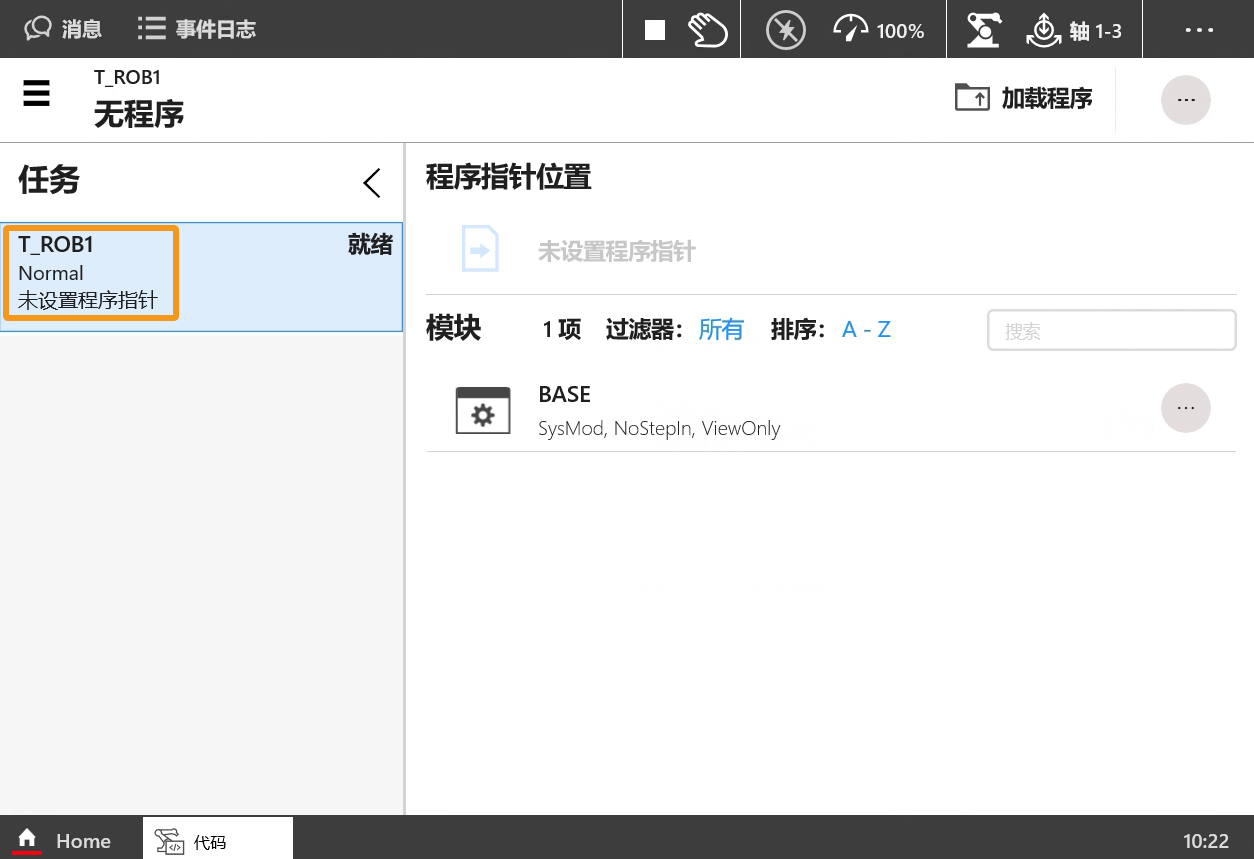
태스크를 클릭하고 팝업 태스크 표시줄에서 T_ROB1 태스크를 선택합니다.
-
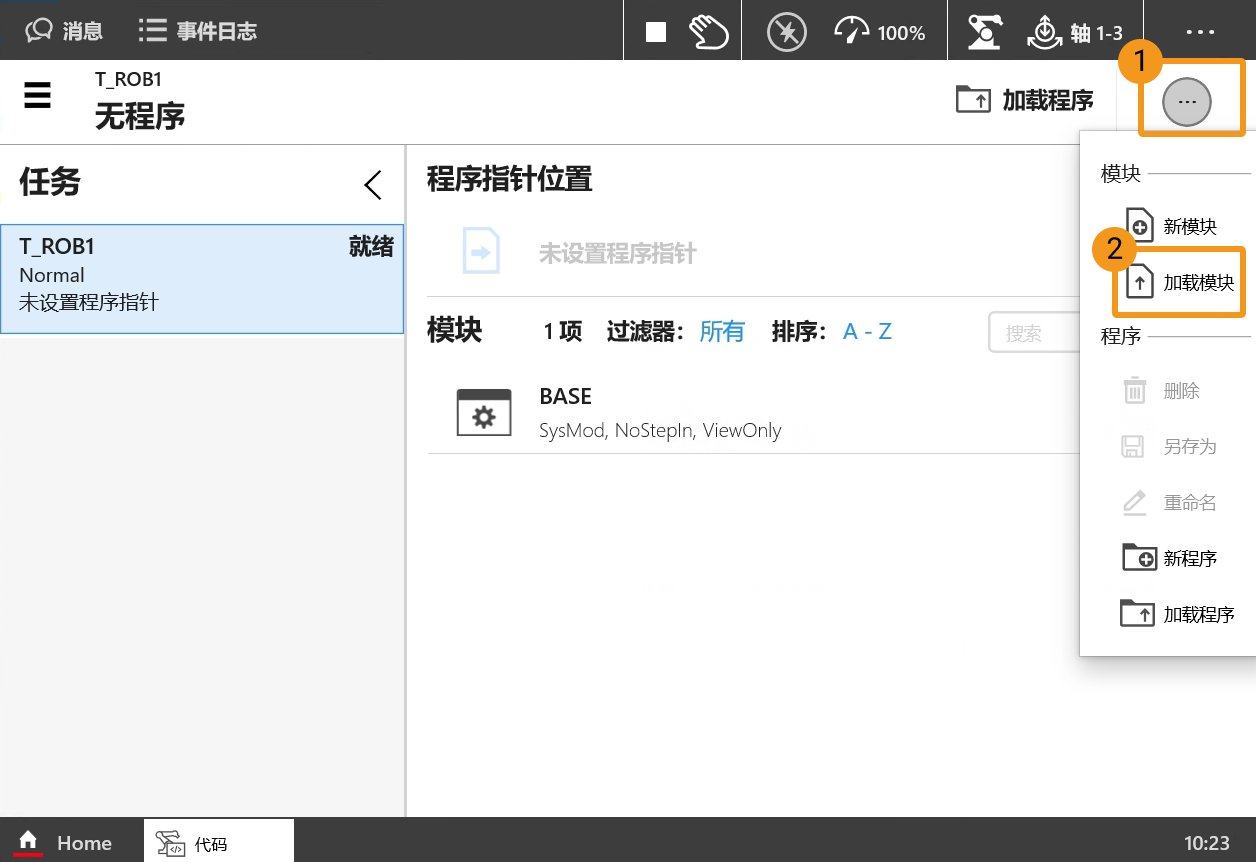
오른쪽 상단에 있는 메뉴를 클릭한 다음 모듈 로드를 클릭합니다.
-
KINGSTON(D:)을 클릭한 다음 USB 디스크 파일에서
MM_Module.modx파일을 찾아서 선택하고 마지막으로 로딩를 클릭합니다.여기에 표시된 KINGSTON은 사용된 USB가 Kingston 브랜드임을 나타냅니다. 다른 브랜드의 USB를 사용하는 경우 다른 특정 브랜드 이름이 여기에 표시됩니다. 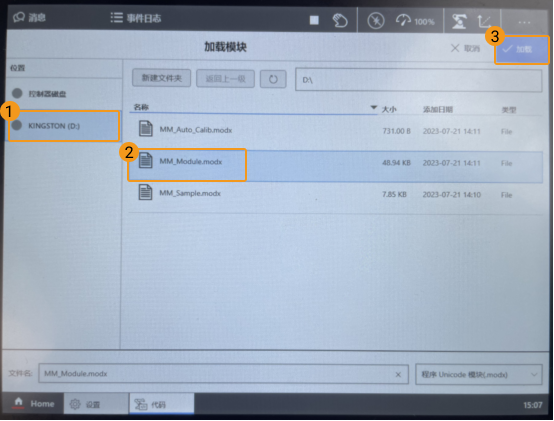
-
이전 단계를 참조하여
MM_Auto_Calib.modx파일과MM_Com_Test.modx파일을 순차적으로 로봇 시스템에 로딩하고, 로딩이 완료되면 아래 그림과 같습니다.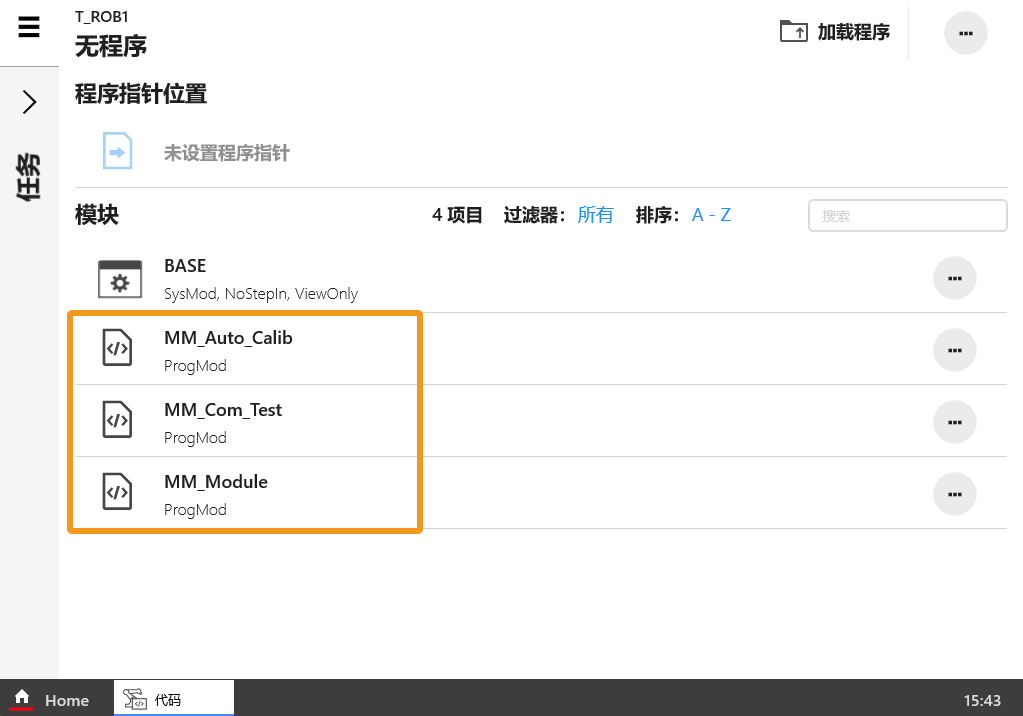
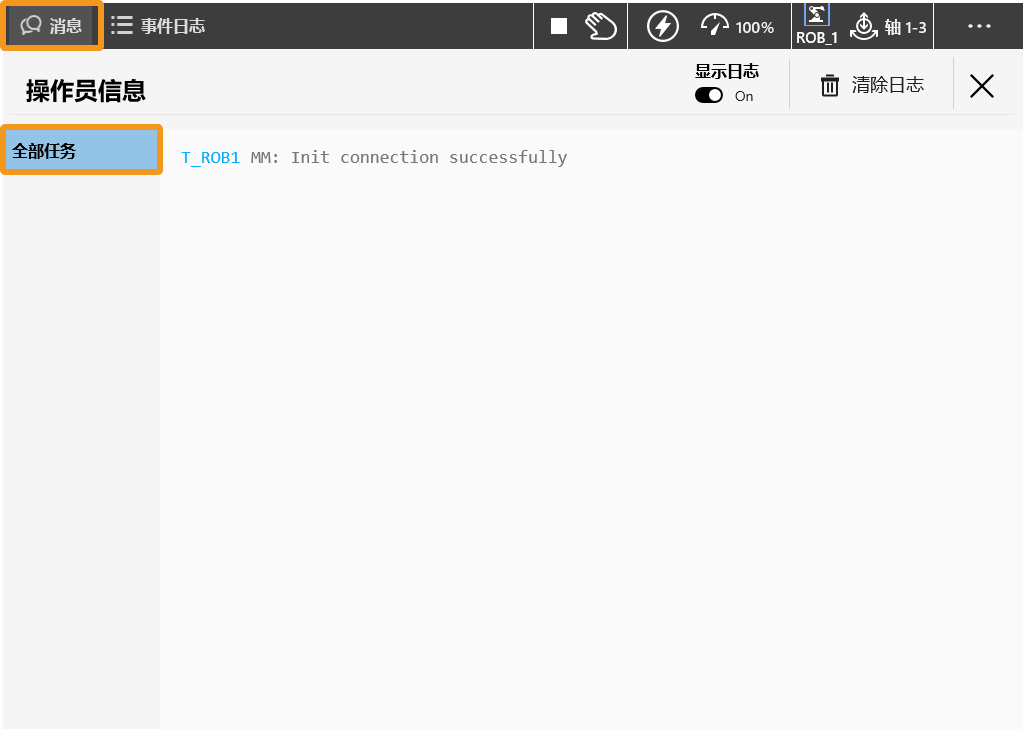
표준 인터페이스 통신 테스트
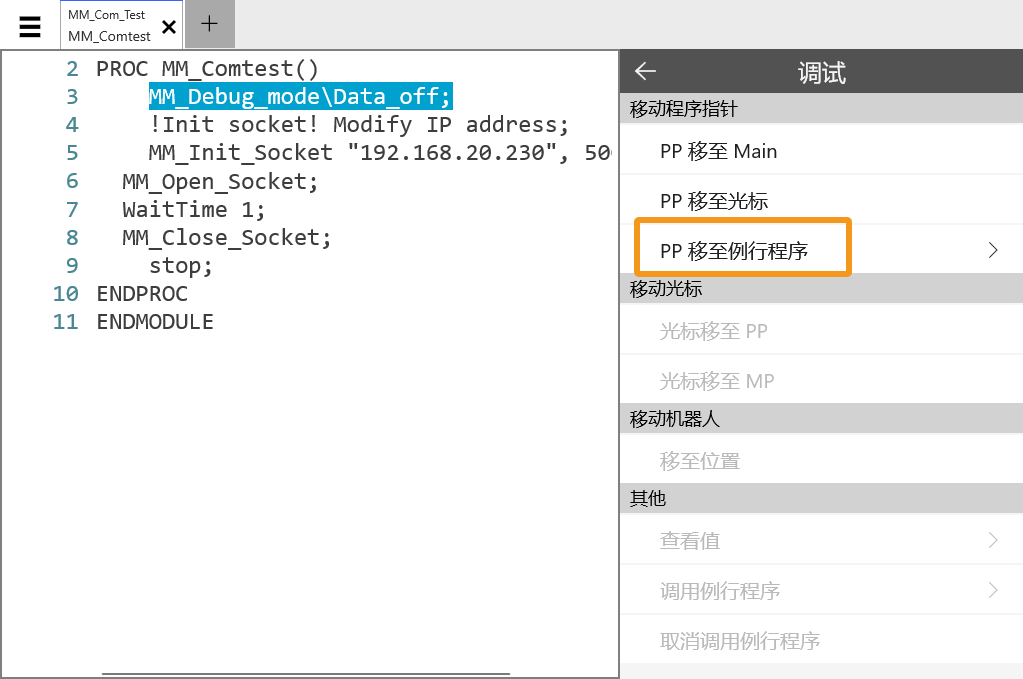
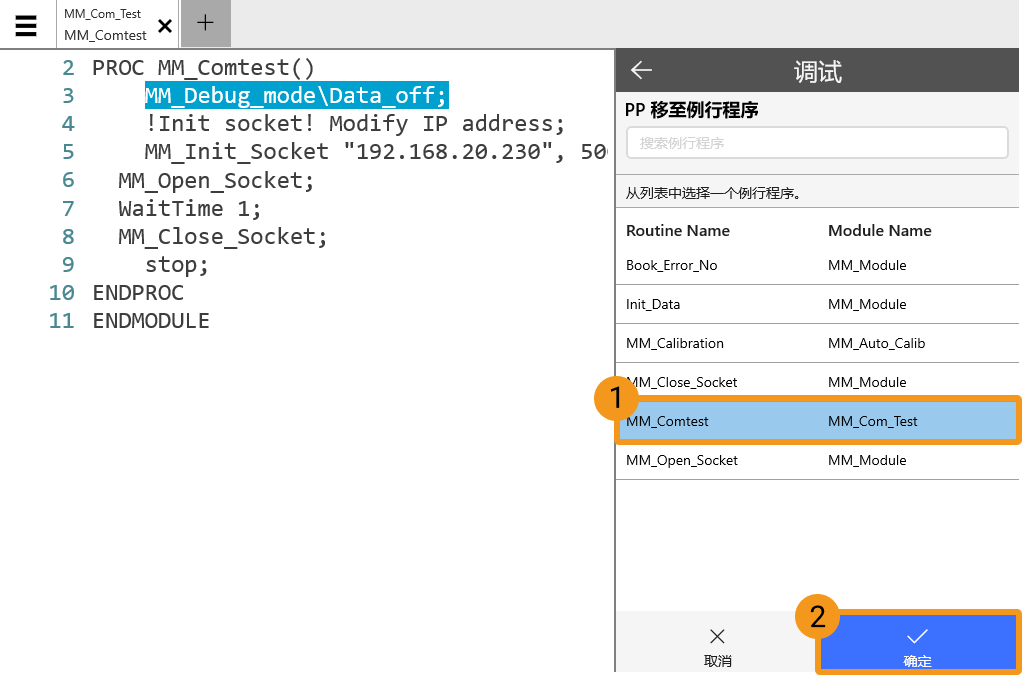



문제 해결
복제가 완료된 후에도 정상적으로 연결될 수 없는 경우 다음 사항을 확인해 주시기 바랍니다.
-
IPC:
-
방화벽이 꺼져 있는지 확인하십시오.
-
CMD 명령 프롬프트를 통해 로봇 IP를 핑(ping)할 수 있는지 확인하십시오.
-
다른 바이러스 백신 소프트웨어의 영향이 없는지 확인하십시오.
-
서로 다른 IP 네트워크 세그먼트에 있는 IPC의 두 네트워크 포트 간에 충돌이 없는지 확인하십시오.
-
라우터를 통해 연결된 경우 다른 네트워크 케이블의 간섭을 제거하십시오.
-
-
로봇:
-
컨트롤러의 WAN 포트에 올바르게 연결되어 있는지 확인하십시오.
-
로봇의 IP 설정이 올바른지, 다른 네트워크 포트가 아닌 WAN 포트 IP가 수정되었는지 확인하십시오.
-
로봇이 "프로그램 실행" 작업을 수행했습니다.
-
로봇의 방화벽이 네트워크 통신을 허용하는지 확인하십시오.
-