HYUNDAI 표준 인터페이스 통신 설정
이 부분에서 HYUNDAI 표준 인터페이스 통신 설정에 관한 내용을 소개하겠습니다.
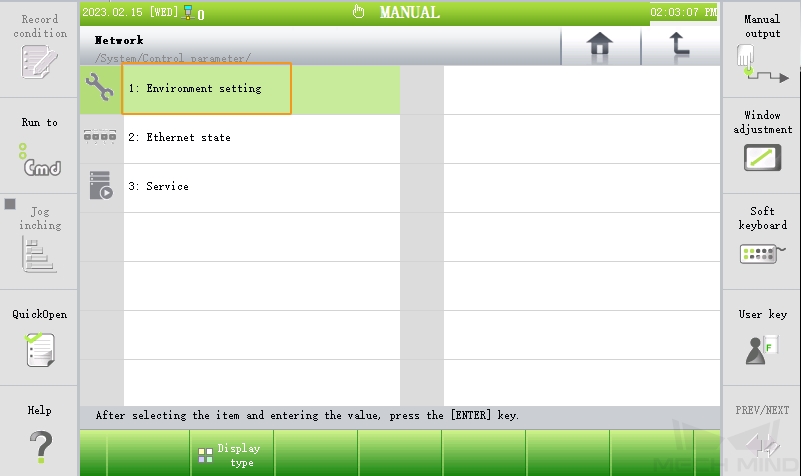
네트워크 연결 설정


프로그램 파일을 준비하기
-
IPC에서 Mech-Mind 소프트웨어 시스템의 설치 디렉터리 아래에 있는
Mech-Center/Robot_Interface/HYUNDAI폴더를 엽니다. -
HYUNDAI 폴더에서 실제 사용하는 로봇 모델에 따라 각 .JOB 파일의 첫 줄을 수정합니다. 예를 들어, “Program File Format Version: 1.6 MechType: 739(HH4-01) TotalAxis: 6 AuxAxis: 0”.
-
로봇의 모델을 알고 있는 경우 파일을 직접 수정하면 됩니다.
-
로봇의 모델을 모르지만 현재 로봇에 .JOB 파일이 있는 경우 파일을 도출하여 첫 줄을 복제하고 HYUNDAI 폴더에 있는 모든 .JOB 파일의 첫 줄을 대체해야 합니다.
-
로봇의 모델을 모르고 현재 로봇에 .JOB 파일이 없는 경우 수동으로 .JOB 파일을 생성하여 도출해야 합니다. 자세한 내용은 프로그램 파일 생성 및 프로그램 파일 도출을 참조하십시오.
-
-
USB를 IPC의 포트에 삽입하여 수정된 HYUNDAI 폴더를 USB로 복제하며 마지막으로 USB를 안전하게 뽑으면 됩니다.
파일을 로봇에 복제하기
-
USB를 티치 펜던트에 삽입합니다.
-
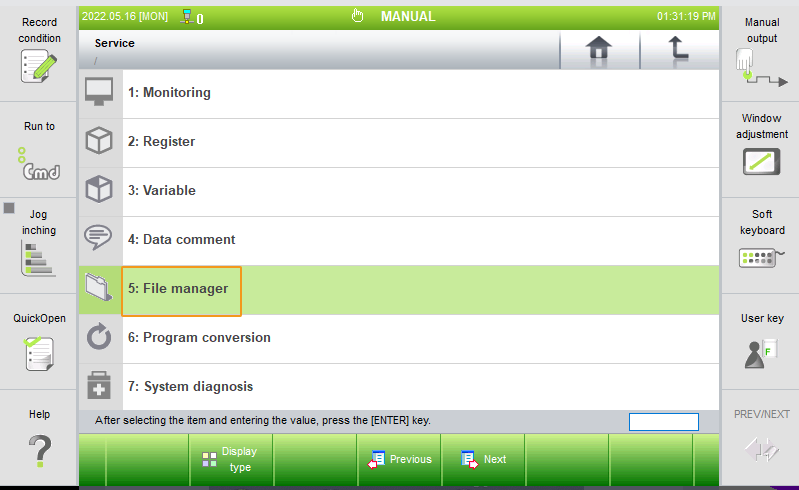
를 클릭하여 HYUNDAI 폴더에 있는 모든 JOB 파일을 선택하고 Copy 버튼을 클릭한 다음에 T/P 폴더를 선택하고 Paste 버튼을 클릭하면 파일을 로봇에 복제할 수 있습니다.
복제한 후의 작업
-
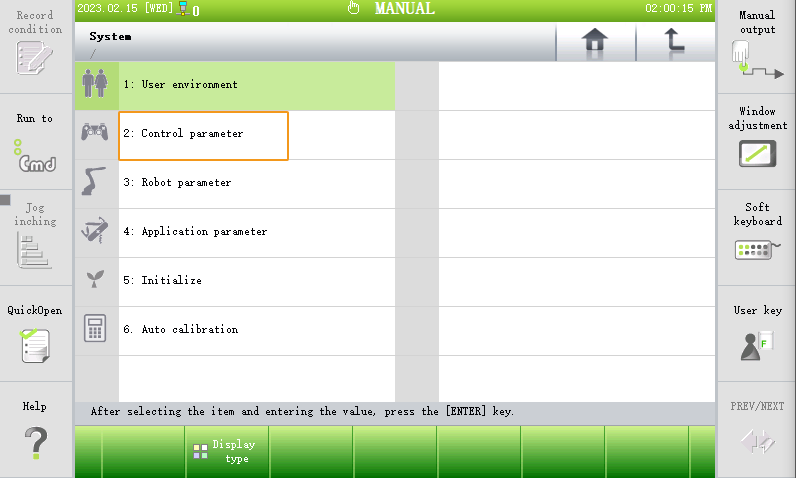
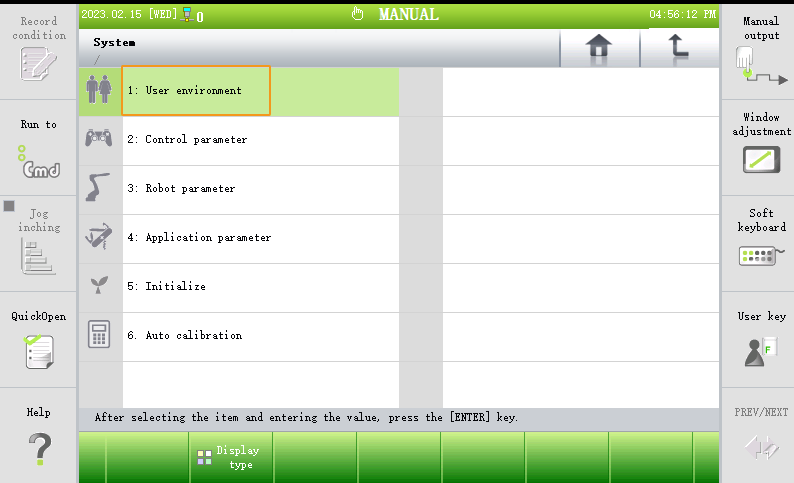
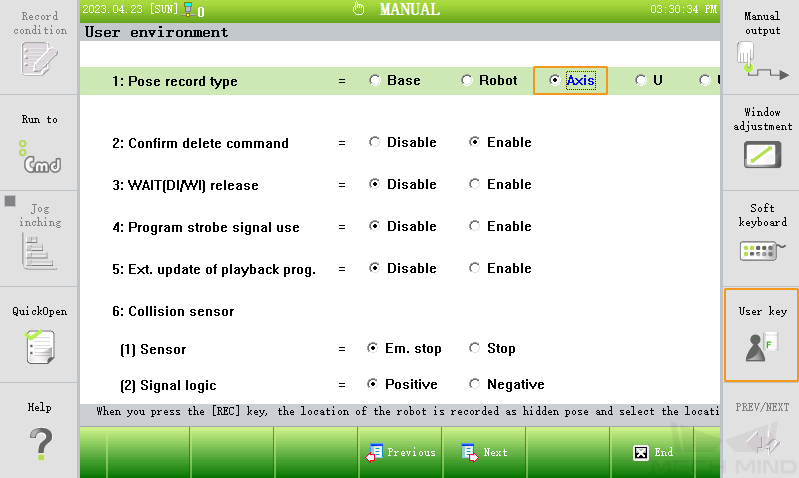
를 클릭하여 사용자 환경 화면으로 들어갑니다.
-
User key 버튼을 클릭하고 314(권한을 요청하는 일반 비밀번호)를 입력하면 권한을 획득할 수 있습니다.
-
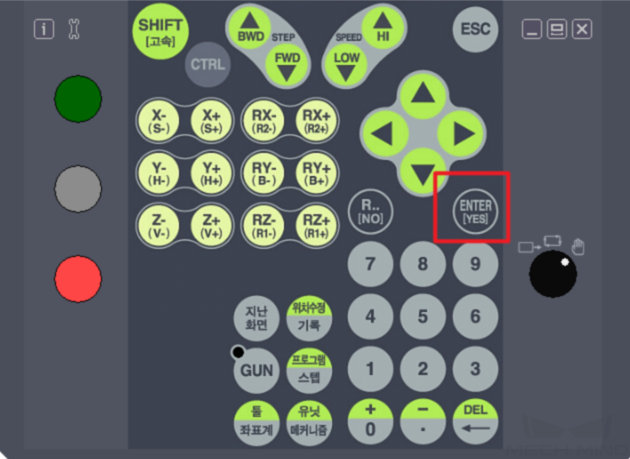
Pose record type*에서 티치 펜던트에 있는 *Shift 버튼을 누르고 왼쪽/오른쪽 버튼을 누르며 *Axis*를 선택합니다.
Mech-Vision에서 “로봇 및 인터페이스 구성” 설정
-
Mech-Vision 툴 바에서 로봇 및 인터페이스 구성을 클릭합니다.
-
로봇 선택 드롭다운 디렉터리를 클릭하고 목록에 있는 로봇 을 선택한 다음 로봇 모델 선택을 클릭하여 로봇 모델을 선택합니다. 그 다음에 다음을 클릭합니다.
-
통신 방식 화면에서 인터페이스 유형을 *표준 인터페이스*로 선택하고, 프로토콜을 *UDP 서버*로 선택하며 프로토콜 형식을 *ASCII*로 선택한 다음에 응용 버튼을 클릭합니다.
-
Mech-Vision 메인 화면에서 툴 바에 있는 “인터페이스 서비스” 기능이 활성화되어 있는지 확인합니다.
표준 인터페이스 통신 테스트
-
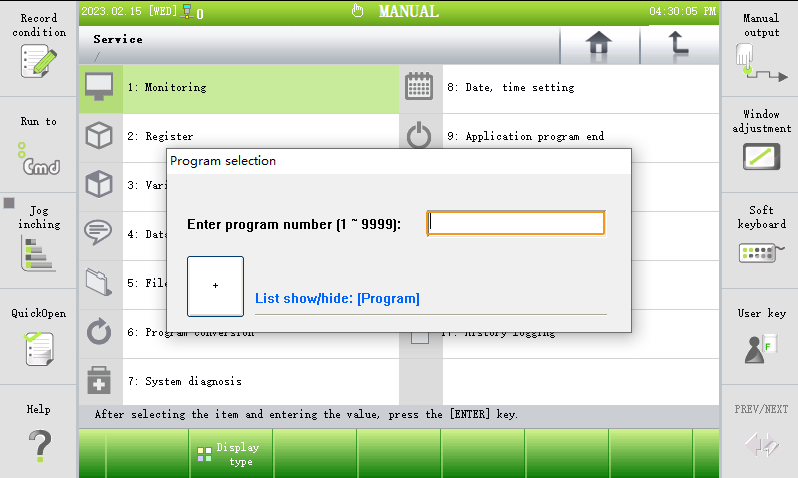
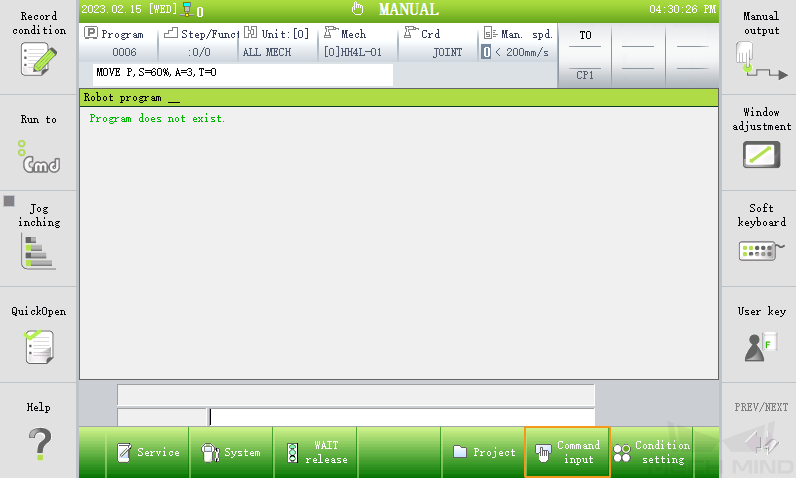
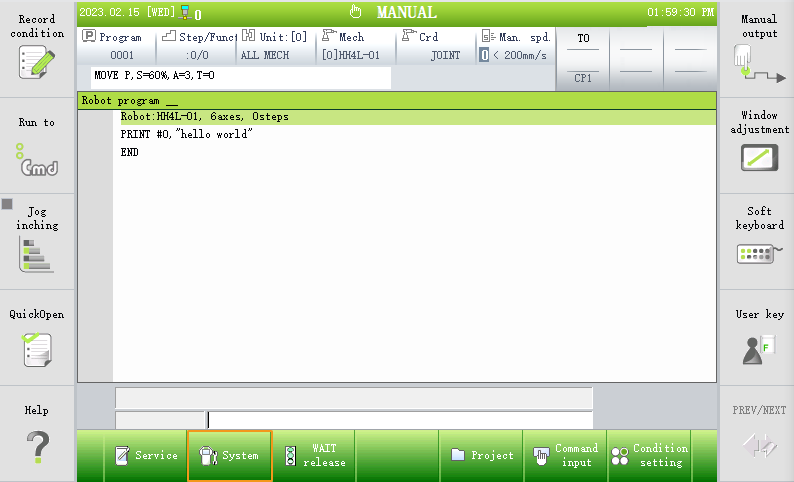
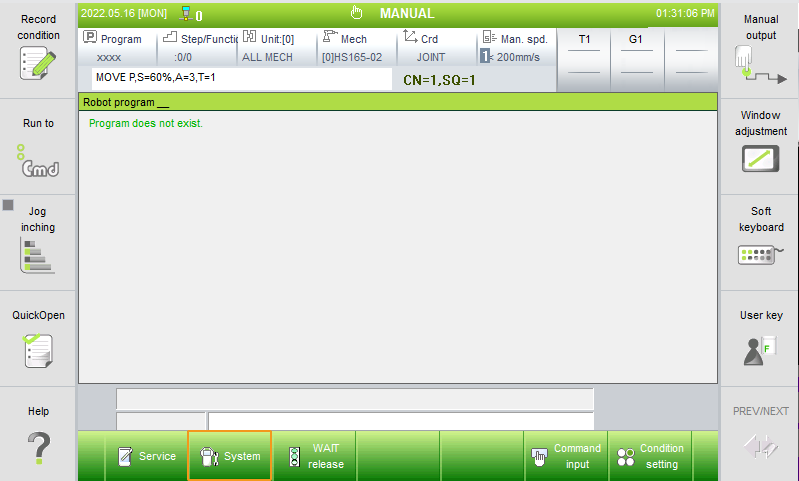
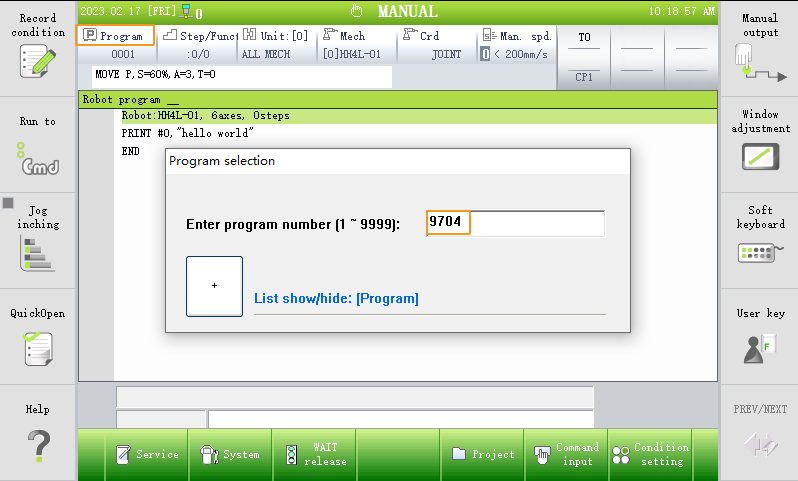
티치 펜던트 화면에서 왼쪽 상단에 있는 Program 구역을 클릭하여 입력 상자에서 9704를 입력하여 9704 프로그램을 엽니다.
-
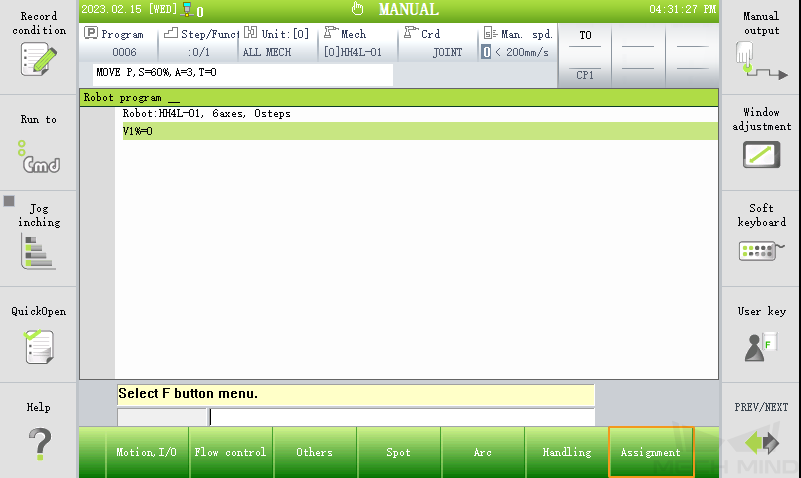
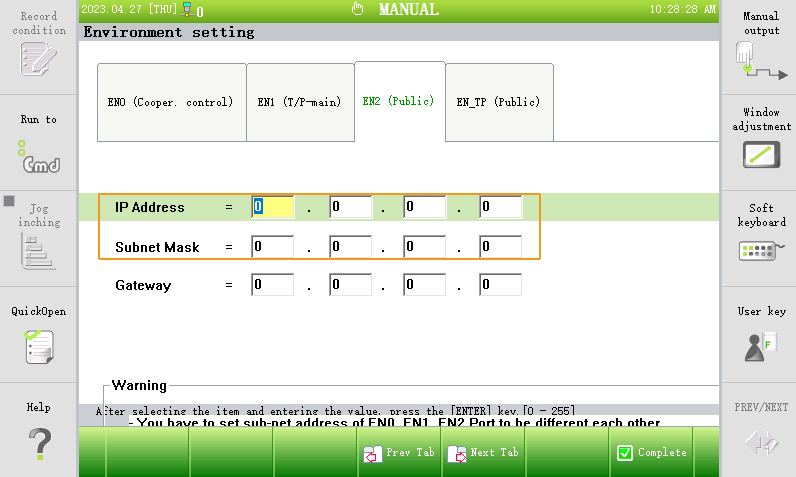
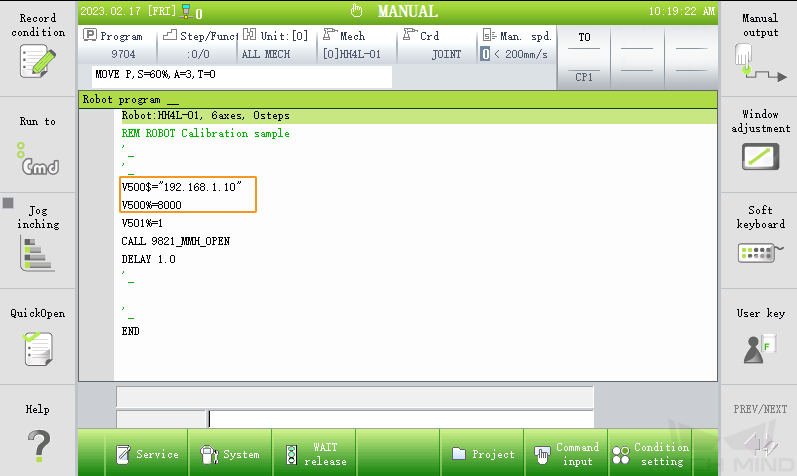
V500$의 값을 IPC의 IP로 수정하고 V500%의 값을 Mech-Vision에서 설정된 포트 번호로 수정합니다.
-
노브를 자동 모드로 전환하고 START 버튼을 눌러 로봇 프로그램 9704를 실행합니다. 연결에 성공하면 Mech-Vision 로그 창의 Console 탭 아래에 관련 프롬프트가 나타납니다.