HYUNDAI (현대)
이 부분에서는 현대 로봇을 마스터 컨트롤하는 방법을 설명하겠습니다.
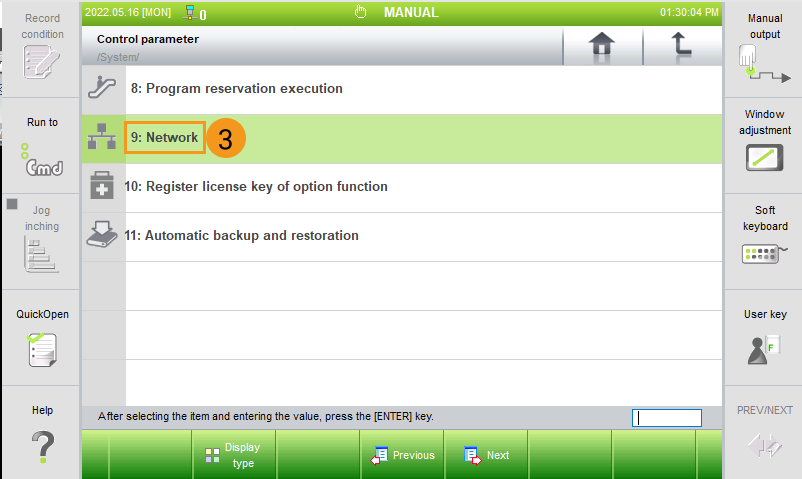
네트워크 연결 설정

파일을 로봇에 복제하기
-
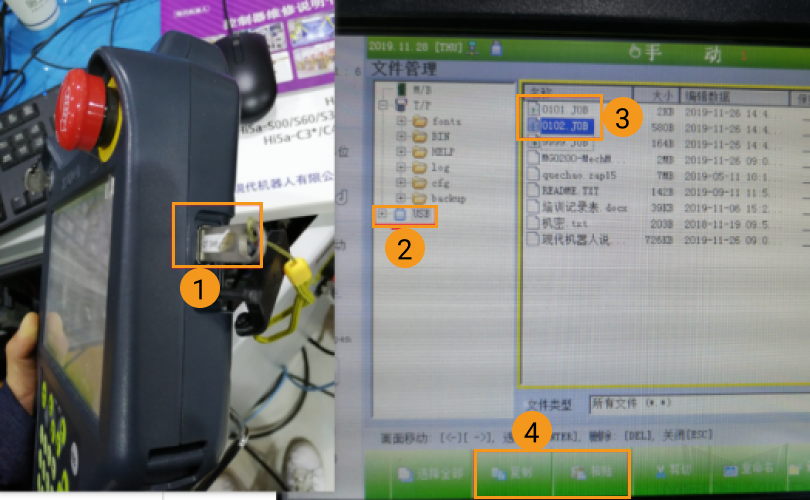
USB를 티치 펜던트에 삽입합니다.
0101.JOB 및 0102.JOB 파일에서 첫 번째 줄의 Program File Format Version 내용을 수정해야 합니다.
로봇에 이미 사용 가능한 다른 프로그램이 있는 경우 단계5로 건너뛰십시오. -
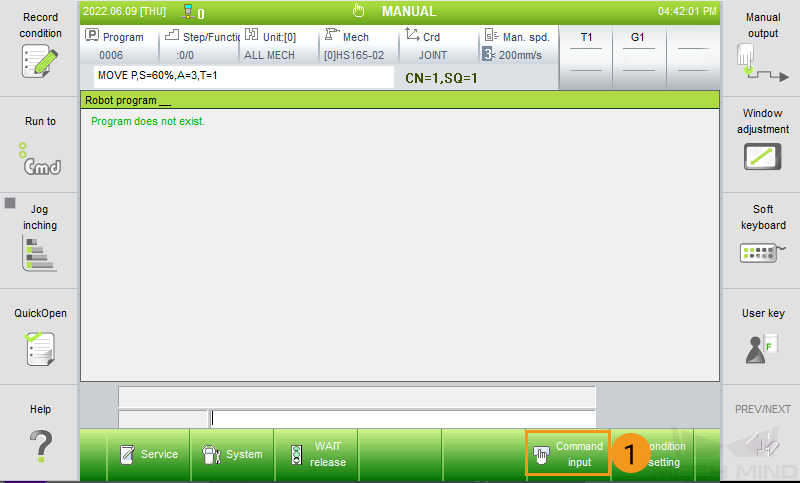
Command input 버튼을 클릭하십시오.
-
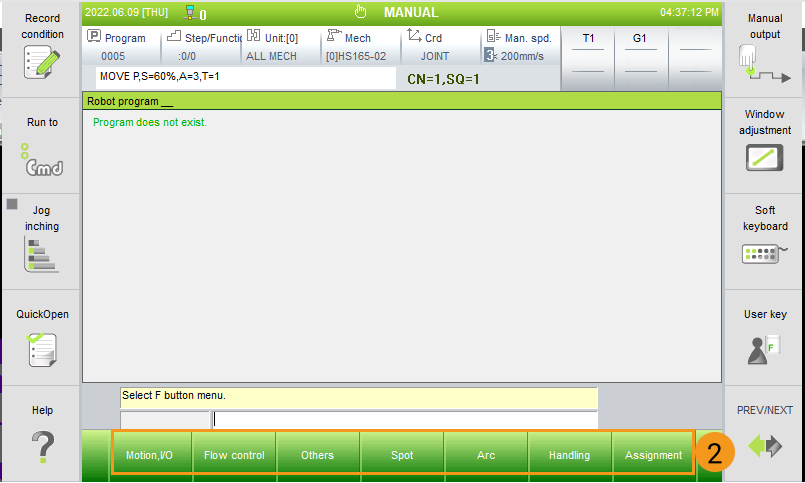
아래 그림과 같이 입력할 명령 중 하나를 선택합니다.
-
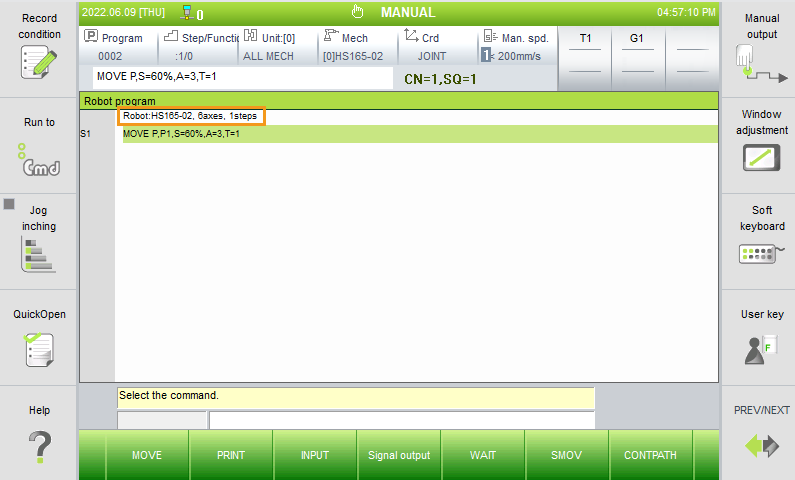
이때 로봇 버전 정보를 볼 수 있습니다. 다음으로 프로그램을 저장하십시오.
-
새로 생성된 프로젝트 파일(또는 기존의 프로젝트 파일)을 선택하고 Copy 버튼을 클릭합니다. 다음으로 USB 폴더로 전환하고 Paste 버튼을 클릭하십시오. 복제 과정이 끝난 뒤 USB를 뽑으십시오.
-
IPC에 USB를 삽입하고 새 프로젝트에서 0101.JOB, 0102.JOB를 제외한 임의의 파일을 열어 첫 번째 줄을 복사합니다.
-
HYUNDAI 로봇 프로그램 파일 0101.JOB 및 0102.JOB(Mech-Mind 시스템 소프트웨어 설치 목록 `Mech-Center/Robot_Server/Robot_FullControl/hyundai/Hi5a-S`에 있음)을 열어 복사한 내용을 붙여넣고 첫 번째 줄 내용을 대체하며 저장하십시오.

-
0101.JOB 및 0102.JOB 파일을 USB에 복제합니다. 티치 펜던트에 USB를 삽입하고 를 클릭하여 0101.JOB 및 0102.JOB 파일을 선택합니다. 다음으로 Copy 버튼을 클릭하고 T/P 폴더로 전환한 후 Paste 버튼을 클릭하면 파일을 로봇에 복제할 수 있습니다.
복제한 후의 작업
-
IPC의 IP 주소를 192.168.0.150(기본값)으로 변경합니다.
-
이 IP는 0101.JOB 및 0102.JOB 파일과 관련됩니다. 변경하려면 101 및 102 프로그램 내용도 변경해야 합니다.
-
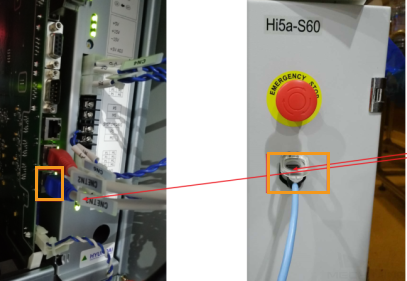
로봇의 IP 조소는 IPC의 IP 조소와 동일한 네트워크 세그먼트에 있어야 합니다.
-
-
라우터의 관리 IP 주소를 192.168.0.1로 설정합니다.
-
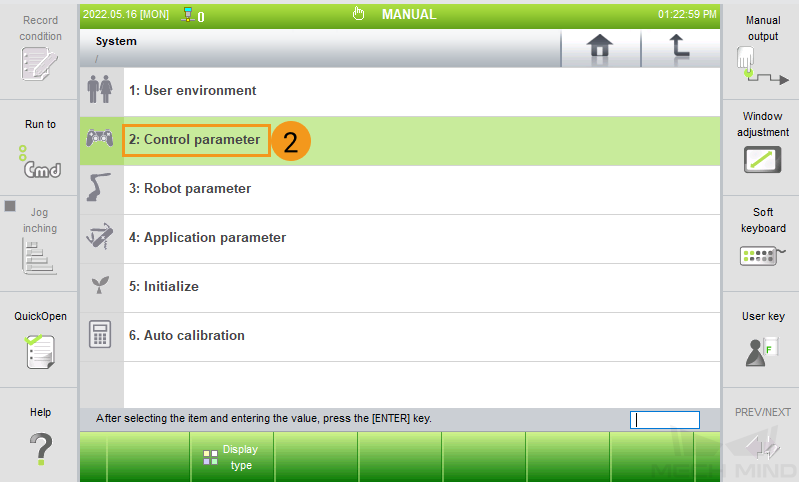
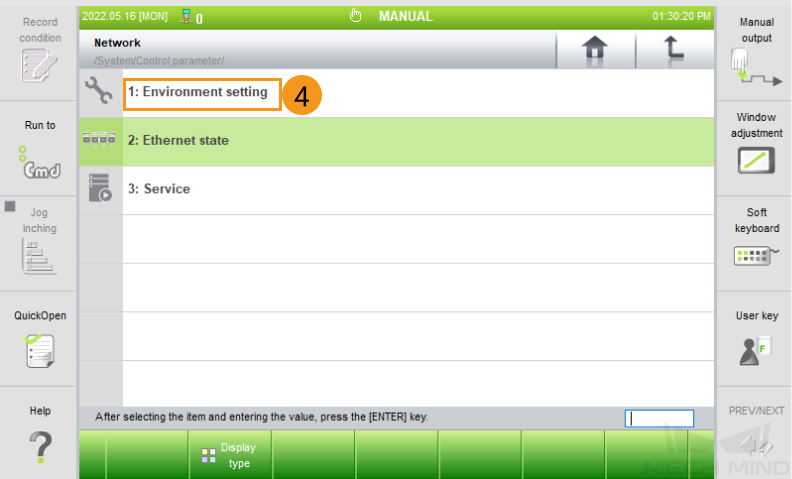
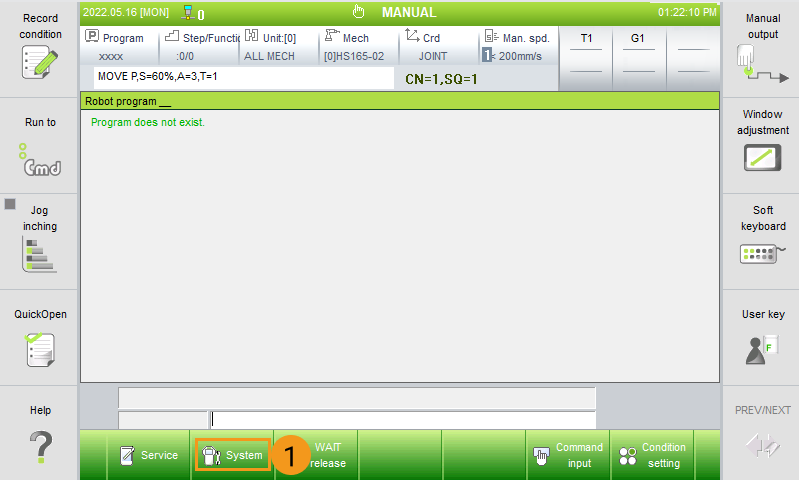
버튼을 클릭하여 사용자 환경 화면으로 들어갑니다.

-
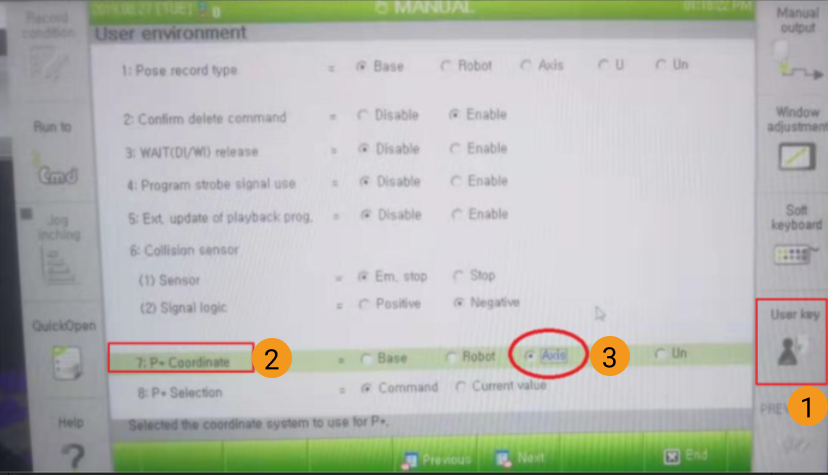
User key 버튼을 클릭하고 314 (권한을 요청하는 일반 비밀번호)를 입력하여 권한을 획득할 수 있습니다.
-
P Coordinate* 관절 정보를 수정하여 Axis 버튼을 클릭합니다.
-
스크린에서 Axis를 선택합니다.
-
티치 펜던트의
SHIFT버튼을 누른 동시에 왼쪽/오른쪽 키를 눌러 왼쪽 또는 오른쪽으로 이동합니다.
관절 정보를 수정하지 않으면 아래와 같은 오류 메시지가 나올 것입니다.

-
로봇 연결 상태 테스트
Mech-Center 설정 체크
-
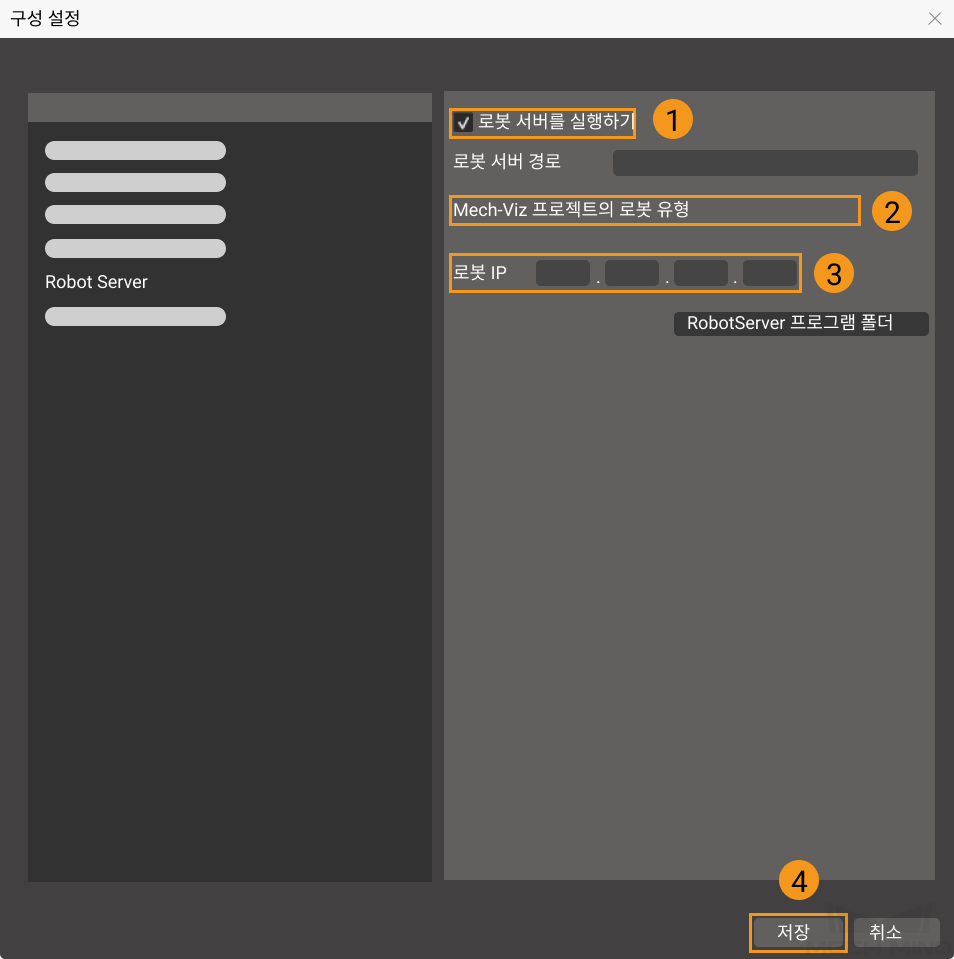
Mech-Center를 시작하고 *구성 설정*
 을 클릭합니다.
을 클릭합니다. -
Robot Server 패널에서 로봇 모델이 실제 로봇의 모델과 일치하는지 확인하십시오.
-
로봇 IP 주소는 반드시 *127.0.0.1*로 설정해야 하고 저장을 클릭합니다.
로봇 연결
-
Mech-Center 툴 바에 있는 *로봇 컨트롤*
 버튼을 클릭하십시오.
버튼을 클릭하십시오. -
로봇을 자동 모드로 전환하십시오.
-
로봇의 101 및 102 “프로그램 스텝/기능”을 0으로 리셋하십시오. 메인 화면에서 을 클릭하여 팝업창에서 0을 입력합니다.
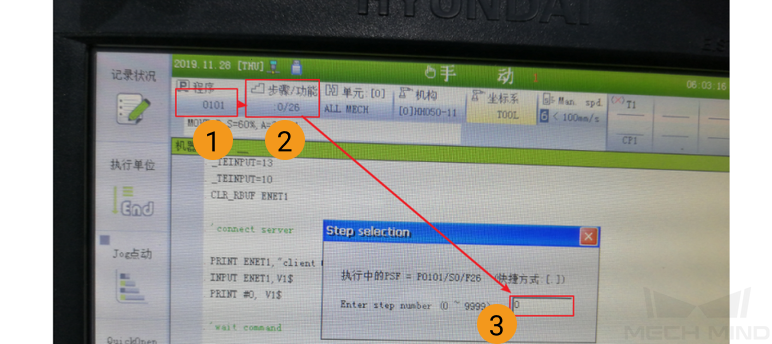
설명: 101 프로그램을 실행하십시오.
-
연결이 성공되면 Mech-Center 서비스 상태 표시줄에서 로봇의 아이콘과 모델이 표시되며 로그 표시줄에서 로봇이 성공적으로 연결되었다는 정보가 나타납니다.
로봇 재연결
-
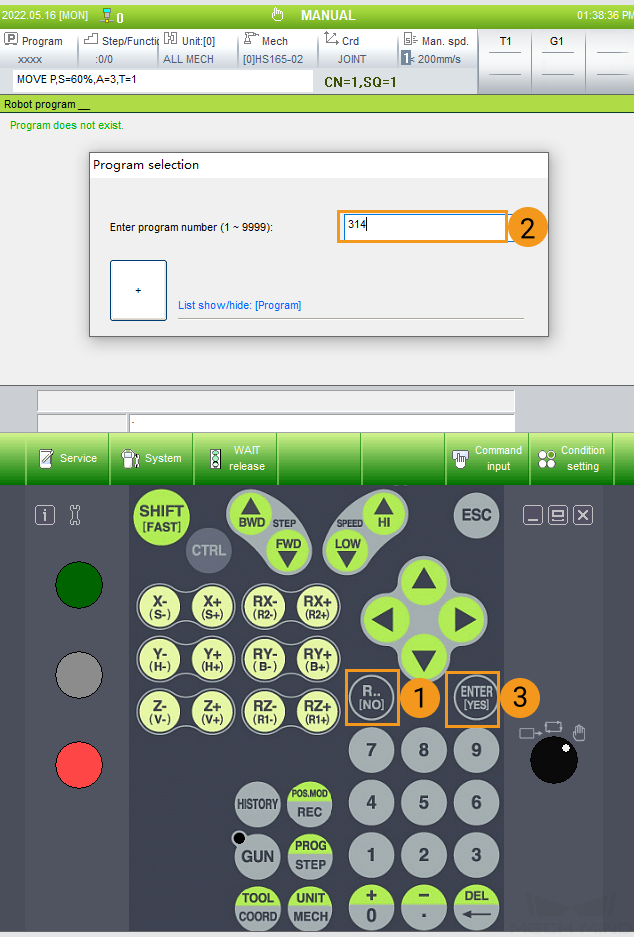
티칭 모드에서 R.. [NO] \-→ 314 \-→ ENTER [YES] 버튼을 클릭하여 권한을 요청합니다.
-
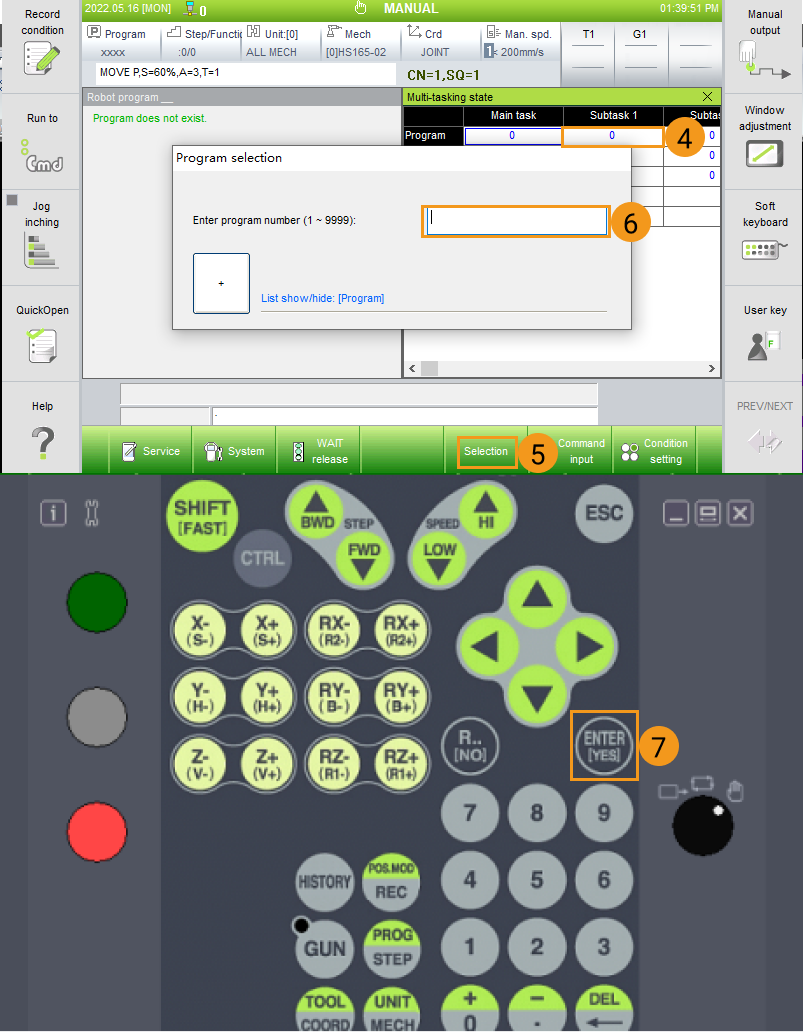
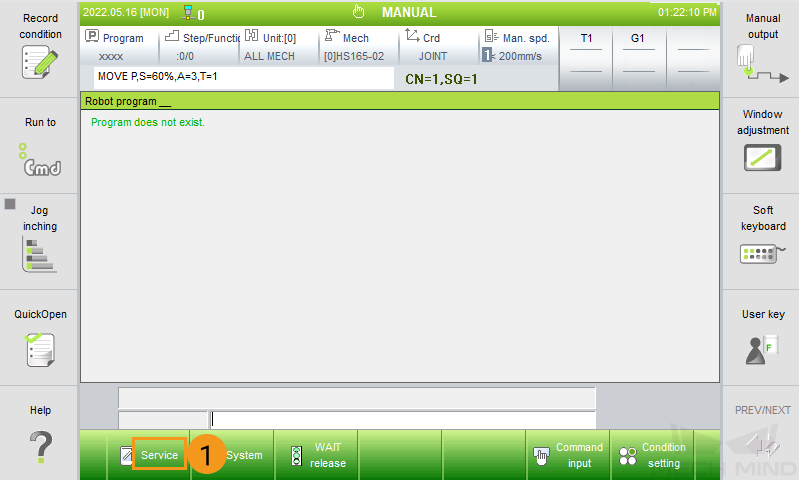
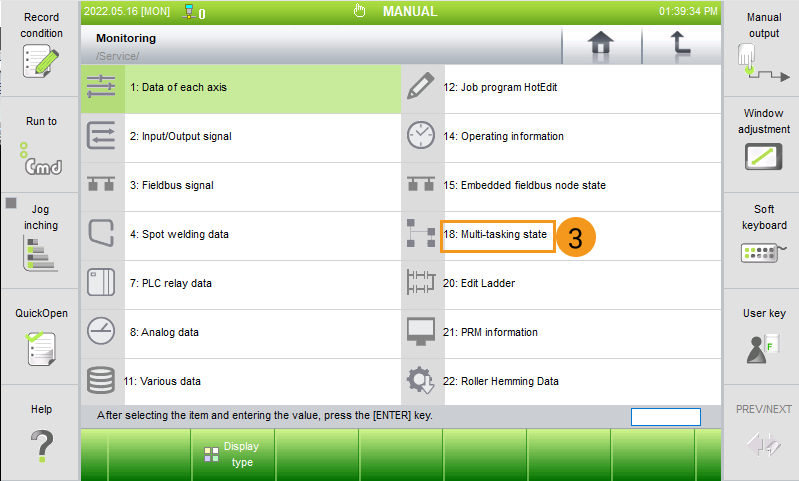
로봇을 재연결할 때마다 백그라운드 작업을 종료하고 포그라운드 포인터를 0으로 설정해야 합니다. Service > Monitoring > Multi-tasking_state > ENTER [YES]를 클릭하여 멀티태스킹 상태 인터페이스로 들어갑니다.

-
Program (Subtask)을 클릭하고 Selection 버튼을 클릭한 다음에 Program Selection 에 3을 입력하여
ENTER [YES]버튼을 클릭하면 설정이 완료됩니다.