ステップ「カメラから画像を取得」は「現在のキャリブレーションモードはEIHで、ロボット位置姿勢の取得に失敗しました」のエラーメッセージが表示される
問題:
Mech-Visionを1.6.2から1.7.0にアップグレードした後、標準インターフェースを使用してプロジェクトを呼び出すと、「カメラから画像を取得」ステップで「現在のキャリブレーションモードはEIHで、ロボット位置姿勢の取得に失敗しました」というエラーが報告されます。
問題が発生するバージョン:
すべてのバージョン
考えられる原因:
ソフトウェアアップグレード後、一部のロボットモデル名が変更されました。
解決策:
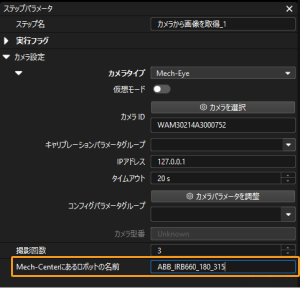
Mech-Centerの「設定」でロボットの名前をMech-Visionプロジェクトの「カメラから画像を取得」ステップのパラメータ「Mech-Centerにあるロボットの名前」に一致するように設定してください。