조명 조정¶
래스터 카메라의 3D 포인트 클라우드 이미징과 딥 러닝의 경우 조명 환경은 비전 인식 효과와 안정성에 영향을 미칩니다.
3D 포인트 클라우드 이미징의 경우 조명이 균일하고 물체의 표면 광도가 낮을 때 포인트 클라우드 품질이 더 좋을 것입니다. 실제 사용 환경에서는 금속 부품의 최대 광도는 600lux를 초과하지 않고 상자와 마대의 표면 광도는 800lux를 초과하지 않는 것이 좋습니다. 다른 시나리오의 경우 이상적인 포인트 클라우드 품질을 보장하기 위해 500lux 이하로 유지해야 합니다. 암실에 균일한 면광원을 추가하는 것이 가장 이상적이고 안정적인 광도 조절 방법이며, 이런 환경에서 부품 표면의 광도가 안정적이며 명암 변화가 없습니다. 암실이 아닌 환경의 경우 합리적으로 차광과 보조 조명 솔루션을 사용하여 3D 포인트 클라우드 이미징의 품질을 향상시키는 것이 좋습니다.
딥 러닝 측면에서 보면 안정적인 조명 환경, 선명하게 보이는 부품 표면, 안정적인 광도가 가장 이상적입니다. 실제 환경에서는 주변광이 시간에 따라 변하기 때문에 딥러닝의 인식 결과에 영향을 미칠 수 있습니다. 차광과 보조 조명을 합리적으로 사용하면 주변광의 변화를 효과적으로 제어하고 딥 러닝 인식 결과를 안정화할 수 있습니다.
팁
광원은 일반적으로 색온도가 6000k이고 백색 일반 LED 광원을 선택합니다.
실제 공장 환경에서는 다음 사항을 확인해야 합니다.
화이트 밸런스 : 2D 이미지가 나타내는 컬러는 육안으로 보이는 컬러와 유사해야 합니다. 그렇지 않으면 카메라의 화이트 밸런스를 조정해야 합니다.
광도 : 현장에 직사광선이 없고 다른 강한 적외선 광원이 없습니다.
반사 : 강광이나 복잡한 빛이 부품 표면에 직사하지 않도록 현장에서 균일하고 부드러운 조명을 선택합니다.
안정성 : 낮과 밤에 광도의 큰 차이를 피하기 위해 현장 조명은 안정적이어야 합니다.
위 사항을 충족하지 못할 경우 차광과 보조 조명 설계를 고려해야 합니다. 다음은 차광 방안입니다.
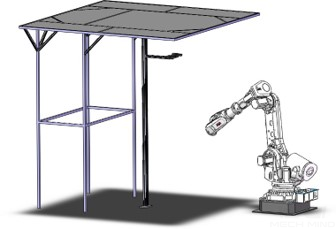
차광 방안¶