キャリブレーションの操作手順¶
本節を開始する前に、以下のことを確認してください。
ロード手順 を参照してロボットプログラムのロードを完了し、Mech-Centerとの接続を確立しました。
ロボットハンド・アイ・キャリブレーションの使用ガイド を確認しました。
本節で紹介する自動キャリブレーションは、インターフェイスを介して、複数のキャリブレーションポイントでデータを取得します。以下の場合、本節をスキップしてください。
ビジョンシステムによるティーチングが可能であれば、Mech-Vizでキャリブレーションポイントを可視化して確認できるため、直に Mech-Vision から 自動キャリブレーション を実行することを推奨します。
インターフェイスでキャリブレーションを行うが、必要な撮像枚数が少ない場合は、 手動キャリブレーション を実行できます。
自動キャリブレーションの手順¶
主に次の手順が含まれます。
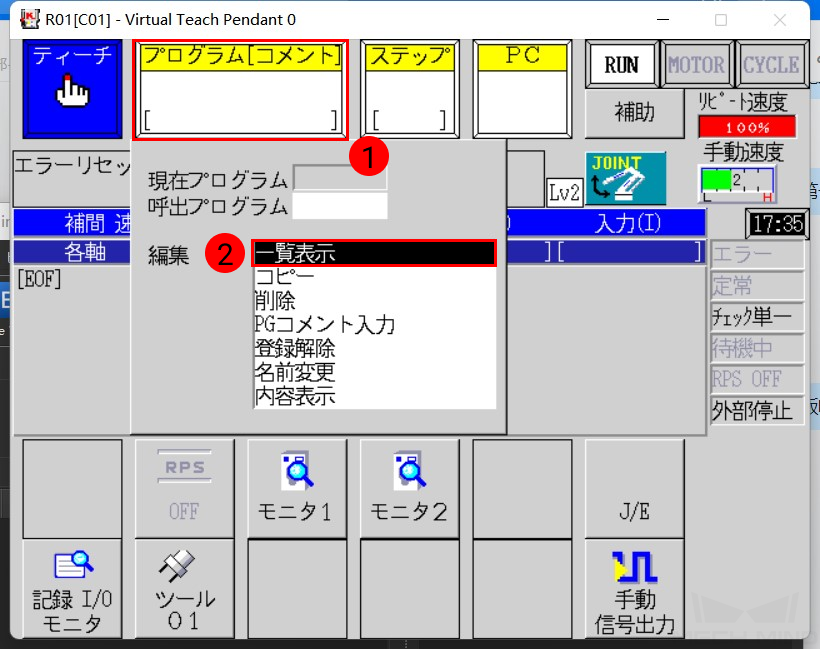
キャリブレーションするためのプログラムを開く¶
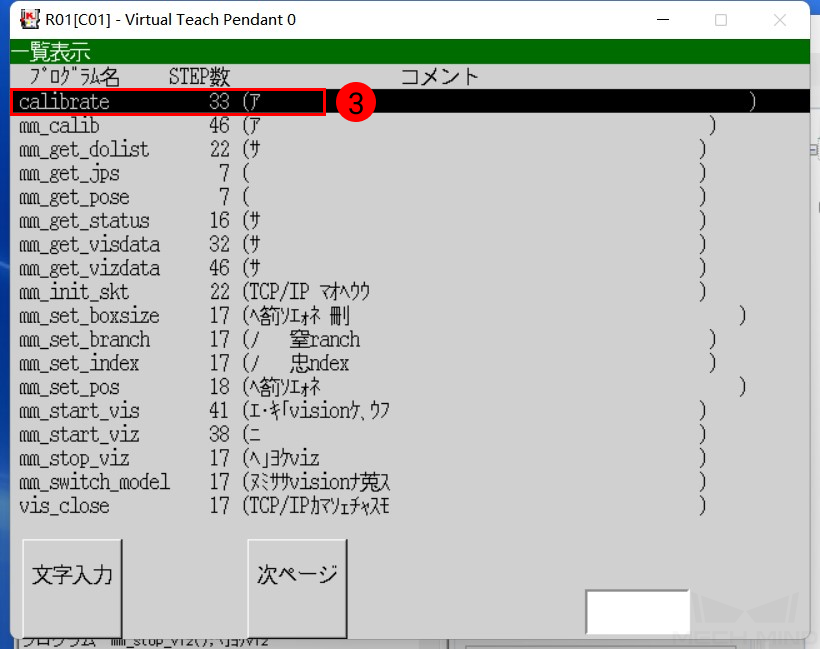
ティーチモードになっていて、プログラムウィンドウをクリックし、 calibrate を選択して、 登録 を押します。
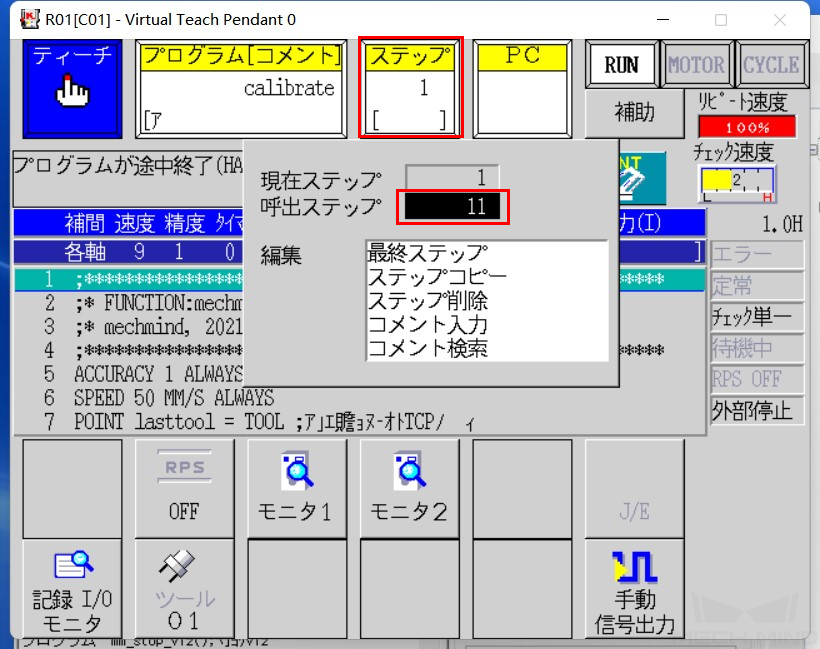
プログラムを選択した後、下図のような画面が表示されます。

キャリブレーションの最下層点を教示¶
まずはロボットを手動でキャリブレーションの最下層点を移動します。
次に、ステップウインドウをクリックし、11を入力して 登録 を押します。
その後、ティーチペンダントの A および 位置修正 を同時に押します。
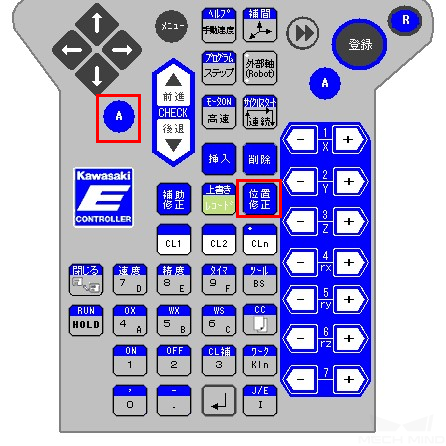
ポップアップウィンドウで はい をクリックして、最下層点の位置姿勢を位置変数 vis_calib_start に変更します。これは、今後の最下層点として直接使用できます。

プログラムを実行¶
リピートモード に切り替えた後、実行モードを ステップ連続、リピート一回 に変更します。また、リピートの速度を10%に設定します。

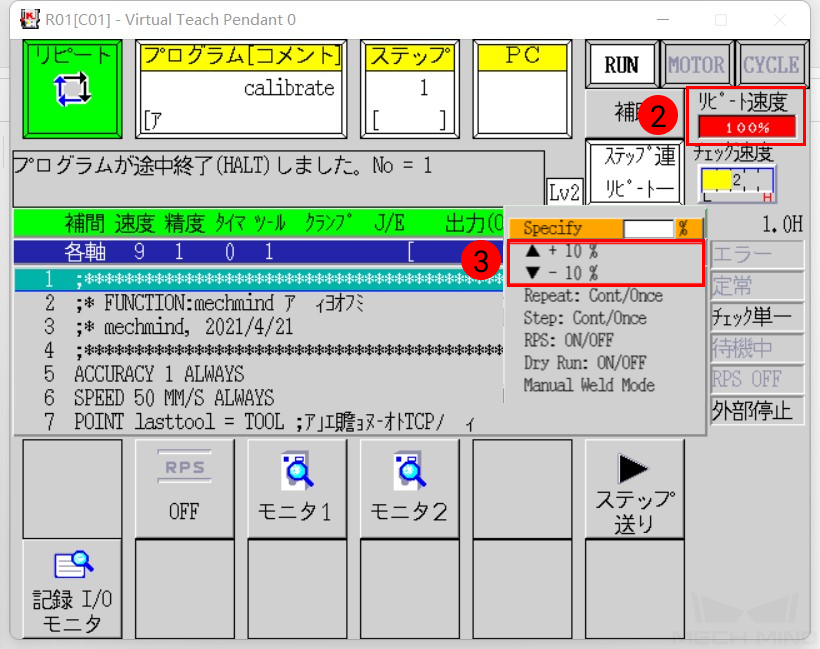
次に、ステップウインドウをクリックし、1を入力して、 登録 を押すと、プログラムは最初の行から実行します。

上記の設定が完了した後、 A を押したまま MOTOR をクリックして MOTOR を点灯させます。 A を押したまま CYCLE をクリックして CYCLE を点灯させます。 RUN が点灯していない場合は、 A を押したまま、 一時停止/実行 を押します。

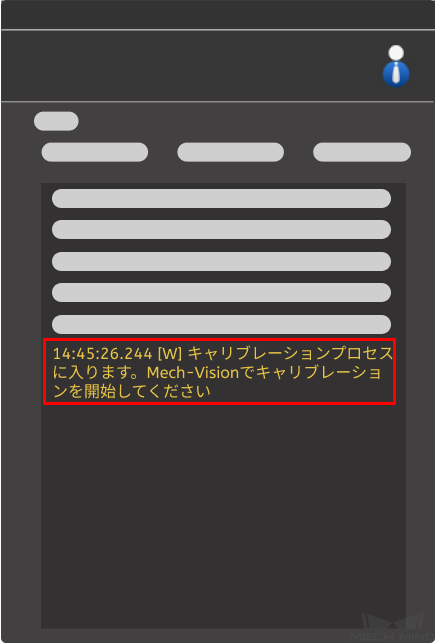
Mech-Centerのログに以下のメッセージが表示されると、次にMech-Visionでキャリブレーションパラメータを設定します。
Mech-Visionでキャリブレーションを実行¶
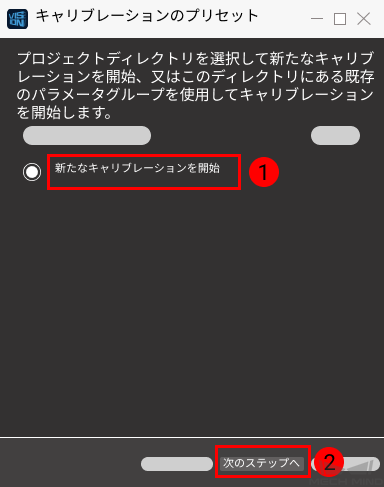
Mech-Visionを起動し、 を順番にクリックして、キャリブレーションツールを起動します。

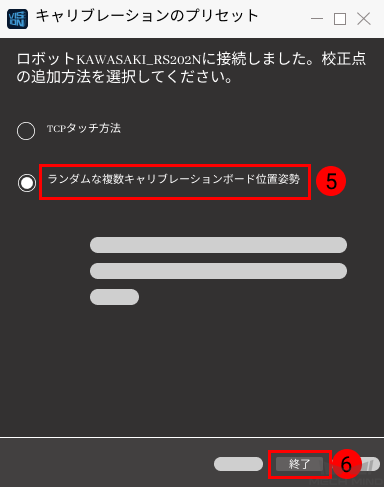
新たなキャリブレーションを開始 にチェックを入れ、カメラの取り付け方式を選択します。ロボットの軸数を選択した後、 ランダムな複数キャリブレーションボード位置姿勢 を選択してキャリブレーション画面に入ります。

ヒント
ロボットが検出されない場合は、接続に異常あります。ロボットプログラムを再実行してください。
キャリブレーションツールのガイダンスに従い、キャリブレーションパラメータを設定します。 既定経路に沿ってロボットを移動して画像を取得 をクリックし、自動キャリブレーションを実行します。
注意
ロボットが60秒以内に次のキャリブレーションポイントに到達しない場合、タイムアウトエラーが発生します。この場合、ティーチペンダントで calibrate を再度選択し、最初の行から実行し、Mech-Visionでキャリブレーションを再開する必要があります。