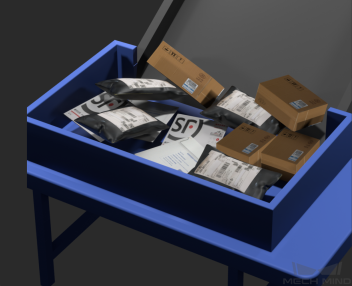
対象物の吸着(箱なし)¶
対象物の吸着(箱なし)のシーンに、物体は多種類があって、形状も異なるので対応するモデルはないため、ディープラーニングアルゴリズムで把持位置姿勢を予測します。
このタイプのプロジェクトの作成方法については、 実行ガイド をご参照ください。
このタイプのプロジェクトのアルゴリズムフローと使用するステップの詳細な説明については、 プロジェクトの詳細な説明 をご参照ください。
対象物の吸着(箱なし)のシーンに、物体は多種類があって、形状も異なるので対応するモデルはないため、ディープラーニングアルゴリズムで把持位置姿勢を予測します。
このタイプのプロジェクトの作成方法については、 実行ガイド をご参照ください。
このタイプのプロジェクトのアルゴリズムフローと使用するステップの詳細な説明については、 プロジェクトの詳細な説明 をご参照ください。