実行ガイド¶
高精度位置決めプロジェクトには、主に次の操作手順が含まれます。
代表的なプロジェクトの新規作成¶
プロジェクトを作成¶
インターフェイスの上部にあるメニューバーで をクリックするか、ツールバーの 代表的なプロジェクトを新規作成 をクリックして以下のような画面に入ります。
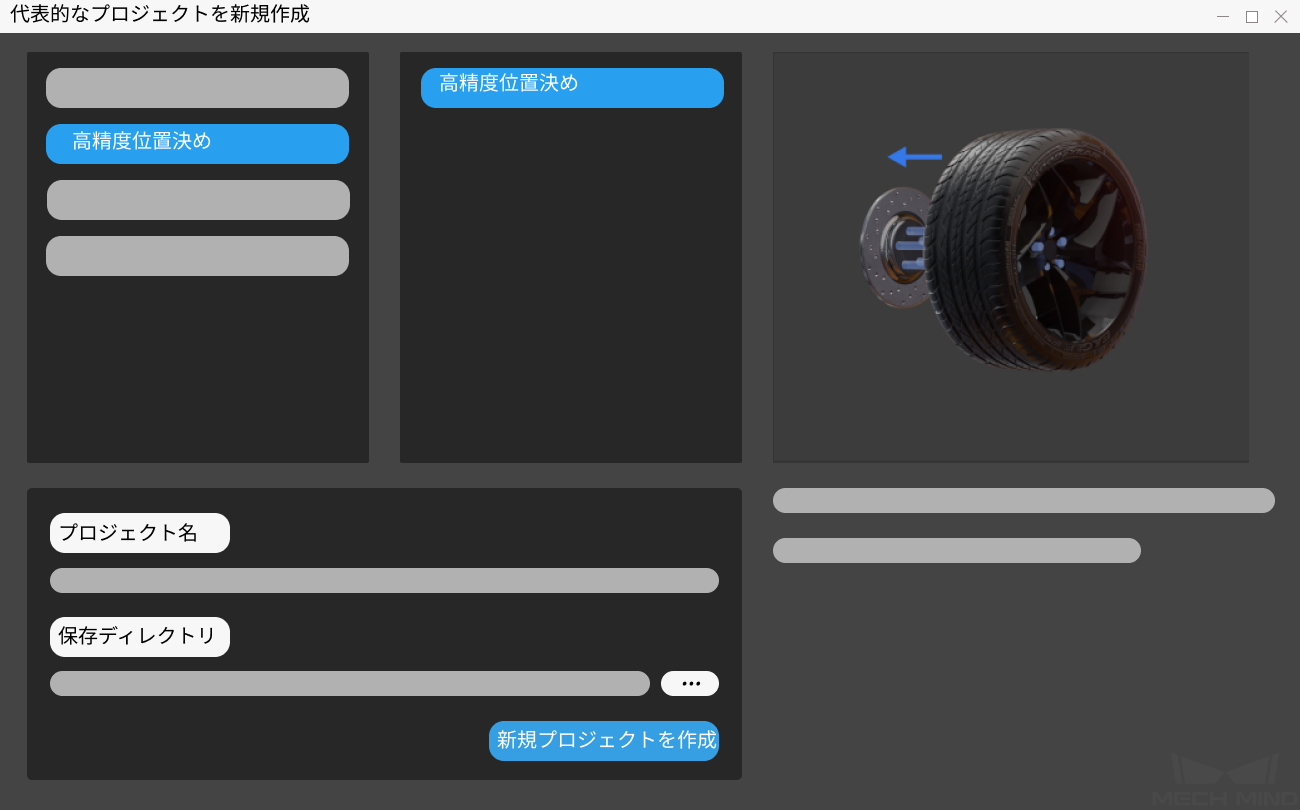
高精度位置決め を選択します。
プロジェクト名を付けて入力します。
 をクリックし、プロジェクトフォルダの保存ディレクトリを選択して(空のフォルダを作成することをお薦めします)、 新規プロジェクトを作成 をクリックします。
をクリックし、プロジェクトフォルダの保存ディレクトリを選択して(空のフォルダを作成することをお薦めします)、 新規プロジェクトを作成 をクリックします。
点群モデルを作成¶
プロジェクトをデプロイしたら、以下をご確認ください。
マッチングモデル・把持位置姿勢エディタ ツールを使用して、3D位置姿勢推定に使用される認識対象物の点群モデルを作成します。
ヒント
点群モデルの作成手順については、 点群モデルを生成 、 点群モデルを編集 、 位置姿勢を追加して把持位置姿勢を追加 をご参照ください。
プロジェクトを実行してデバッグ¶
プロジェクトを実行する前に、 ロボットハンド・アイ・キャリブレーションの使用ガイド を参照してカメラをキャリブレーションします。
キャリブレーションが完了したら、 ステップの使用ガイド を理解した上で カメラから画像を取得 を調整して画像取得前の準備を完了させます。
プロジェクトの実行・デバッグ方法については、 プロジェクトを実行してデバッグ をご参照ください。
高精度位置決めのプロジェクトのアルゴリズムフローとパラメータ調整については、 プロジェクトの詳細な説明 をご参照ください。
プロジェクトデバッグが完了し、かつ正常に実行した後、ユーザーが今後の問題に備えて現場の画像をキャプチャする場合、またはプロジェクトのある段階で効果を改善するために現場でない環境でステップやパラメータを最適化する場合に、 データ保存 と データプレイバック を使用することができます。
データプレイバック を使用する前提:
プロジェクトのファイル(プロジェクト実行時にエラーが発生しないこと)。
2Dカラー画像、深度画像、カメラパラメータファイルなど、プロジェクト実行の全プロセスに取得した現場データ。保存方法は データ保存 をご参照ください。