プロジェクトの詳細な説明¶
適用シーン¶
自動車の組み立て作業には、ハブの位置決めやタイヤの締め付け、ギアボックスの組み立てなど、高い位置精度が求められる工程があります。従来の自動化生産プロセスには、物体の正確な位置情報をロボットに提供することができず、人手の作業が必要なので効率が向上しませんでした。
この問題を解決するために、視覚認識結果とモデルファイルとを複数回マッチングする3Dビジョンによる位置決め技術を使用し、対象物の3D位置姿勢・位置情報を精確に取得し、高精度な組立工程の効率を高めました。
視覚処理の流れと手順の詳しい解説¶
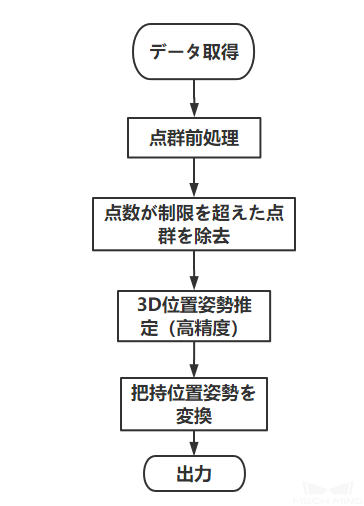
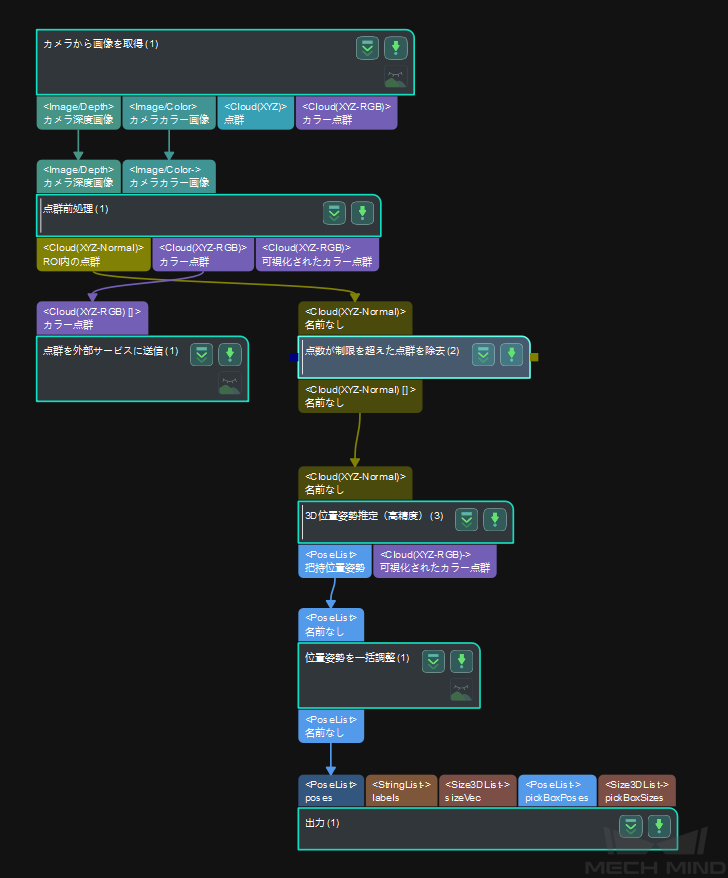
上記によると、「カメラから画像を取得」、「点群前処理」、「点数が制限を超えた点群を除外」、「3D位置姿勢高精度推定」、「位置姿勢を変換」、「出力」の6つの主要部分から構成されるビジョンプロジェクトを作成します。以下では、各部分について詳しく説明します。
関連ステップ¶
カメラから画像を取得¶
このステップは、Mech-Visionとカメラを通信するために使用されます。これにより、シーンの深度画像、カラー画像および点群を取得し、その後の計算に必要なデータを提供します。詳細については、 カメラから画像を取得 をご参照ください。
点群前処理¶
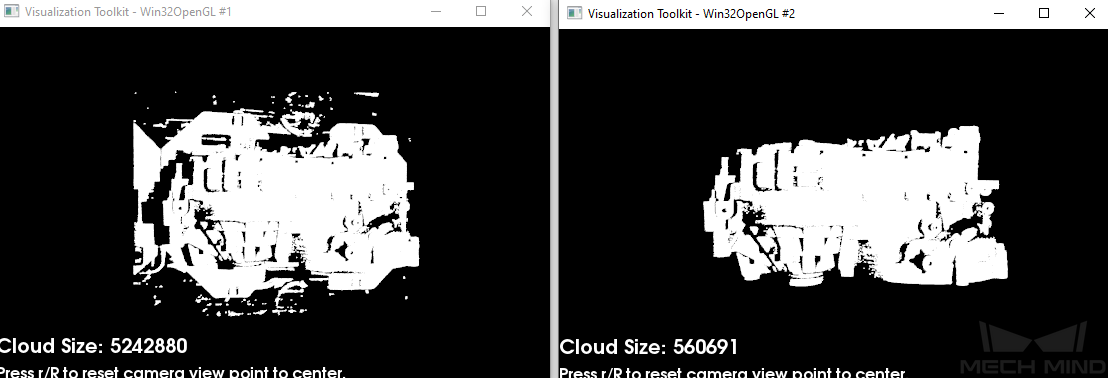
シーンのカラー画像と深度画像を使用して点群を生成し、干渉を除去してROI内の点群を取得することで、後の計算を高速化することができます。詳細については、 点群前処理 をご参照ください。結果は下図に示します(左側は元の点群で、右側は前処理後の点群です)。
点数が制限を超えた点群を除去¶
点群の点数を設定し、要求に満たせない点群を除去することで、その後の計算を高速化することができます。詳細については、 点の数が制限を超える点群を除外 をご参照ください。
3D位置姿勢高精度推定¶
位置姿勢低精度推定と位置姿勢高精度推定を2回組み合わせて、精確な位置姿勢リストを取得します。
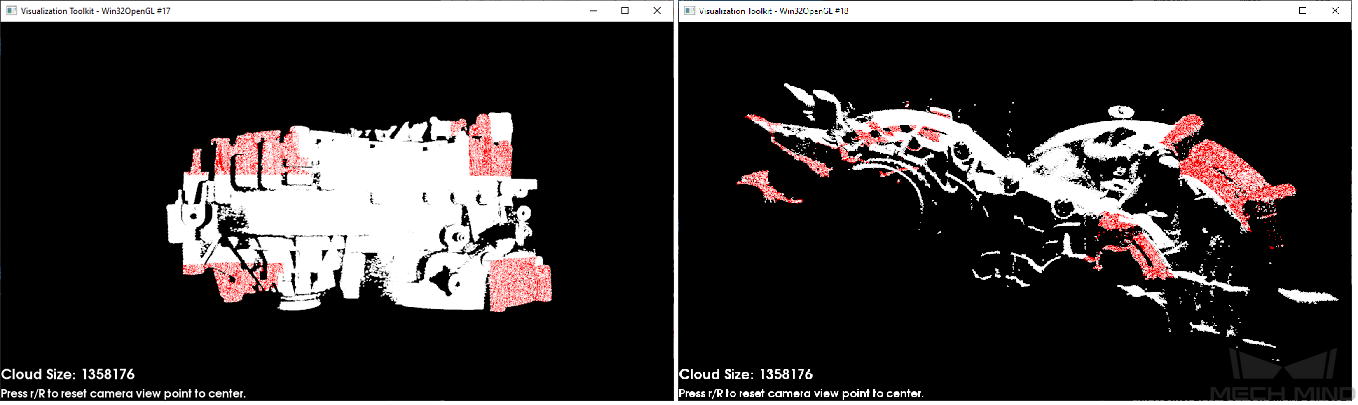
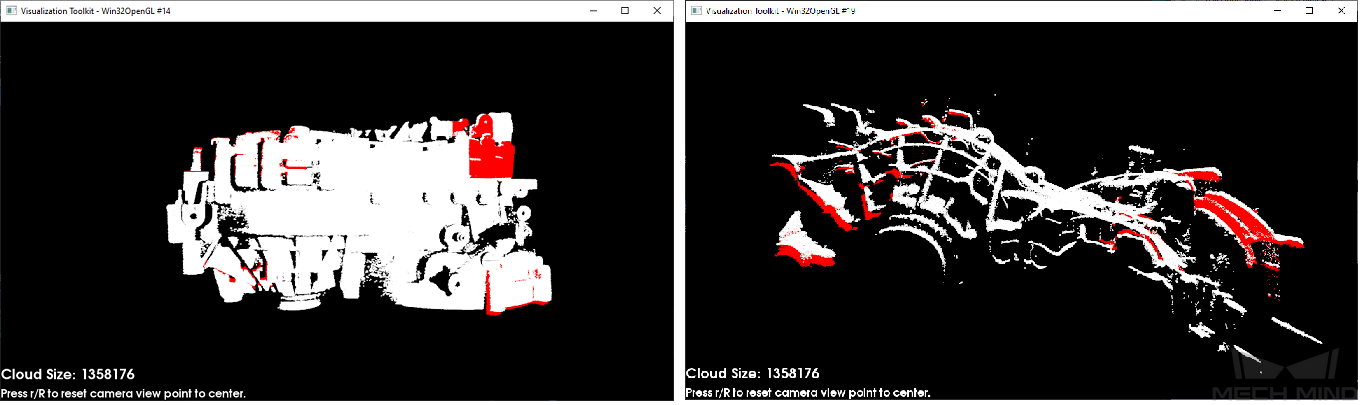
3D位置姿勢低精度推定の結果を下図(左側は正面図、右側は側面図)に示します。白い領域はシーンの点群で、赤い領域はマッチング結果です。2つが完全に一致することはなく、大きな誤差があることを示しています。
この結果を「3D位置姿勢高精度推定」を2回行い、得られた結果が下図(左側は正面図、右側は側面図)のようになります。この時点で、シーンの点群はマッチング結果とほぼ一致しているため、モデルファイルで設定された把持位置姿勢を使用して精確な把持位置姿勢を計算することができます。