付録¶
Mech-Vizでの衝突検出¶
XXX/Mech-Center/tool/viz_project/check_collision フォルダのcheck_collision.vizプロジェクトを使用します。以下のことに注意してください。
check_collision はサンプルプロジェクトです。移動に関するタスクを除くすべてのタスク必須であり、削除や相対的な位置の変更はできません。 ロボットモデルで実際に使用されている型番を選択してください。
移動関連のタスクは、追加・削除が可能です。 送信される位置姿勢の数は、移動に関連するタスクの数と同じです。
初期位置が必要な場合は、ロボット側からカメラで撮像するコマンドを呼び出す前に、位置姿勢を設定するコマンドを一度呼び出します。
Mech-Vizの吸盤コンフィグレータ¶
XXX/Mech-Center/tool/viz_project/suction_zone フォルダのsuction_zone.vizプロジェクトを使用します。以下のことに注意してください。
suction_zone.viz はサンプルプロジェクトです。移動に関するタスクを除くすべてのタスクは必須であり、削除や相対的な位置の変更はできません。 ロボットモデルで実際に使用されている型番を選択してください。
移動関連のタスクは、追加・削除が可能です。 送信される位置姿勢の数は、移動に関連するタスクの数と同じです。
初期位置が必要な場合は、ロボット側からカメラで撮像するコマンドを呼び出す前に、位置姿勢を設定するコマンドを一度呼び出します。
実行する前に吸盤コンフィグレータを設定してください。
ロボット側では、まずカメラで撮像するコマンドを呼び出し、次にDO信号を取得するコマンドを呼び出す必要があります。
対象物のラベルを送信¶
ロボットに送信されるラベルは整数のラベルコードです。 ラベルのマッピングは、Mech-Visionプロジェクトで作成する必要があります。
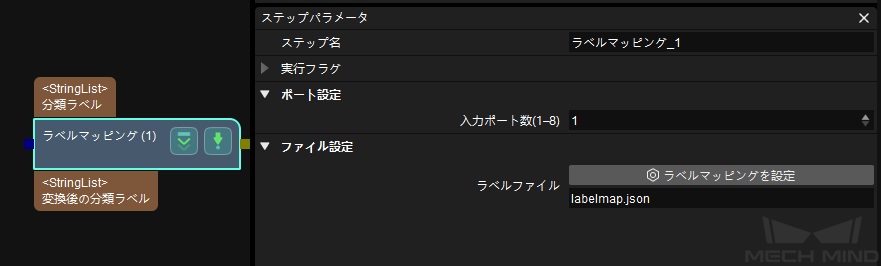
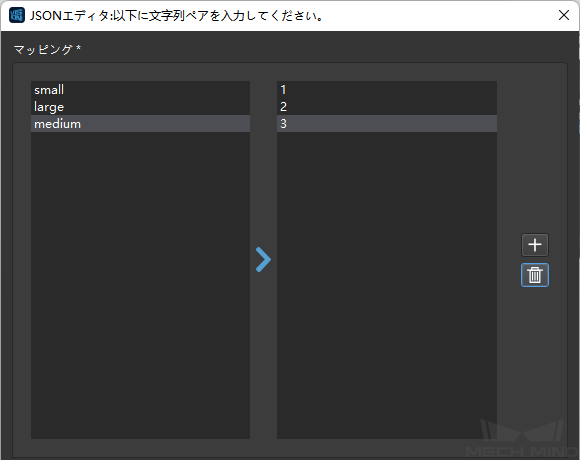
ラベルマッピングのフォーマットは以下の通りです。
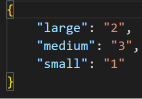
large 、small、medium はラベルの文字列です。
1、2、3はラベルコードです。
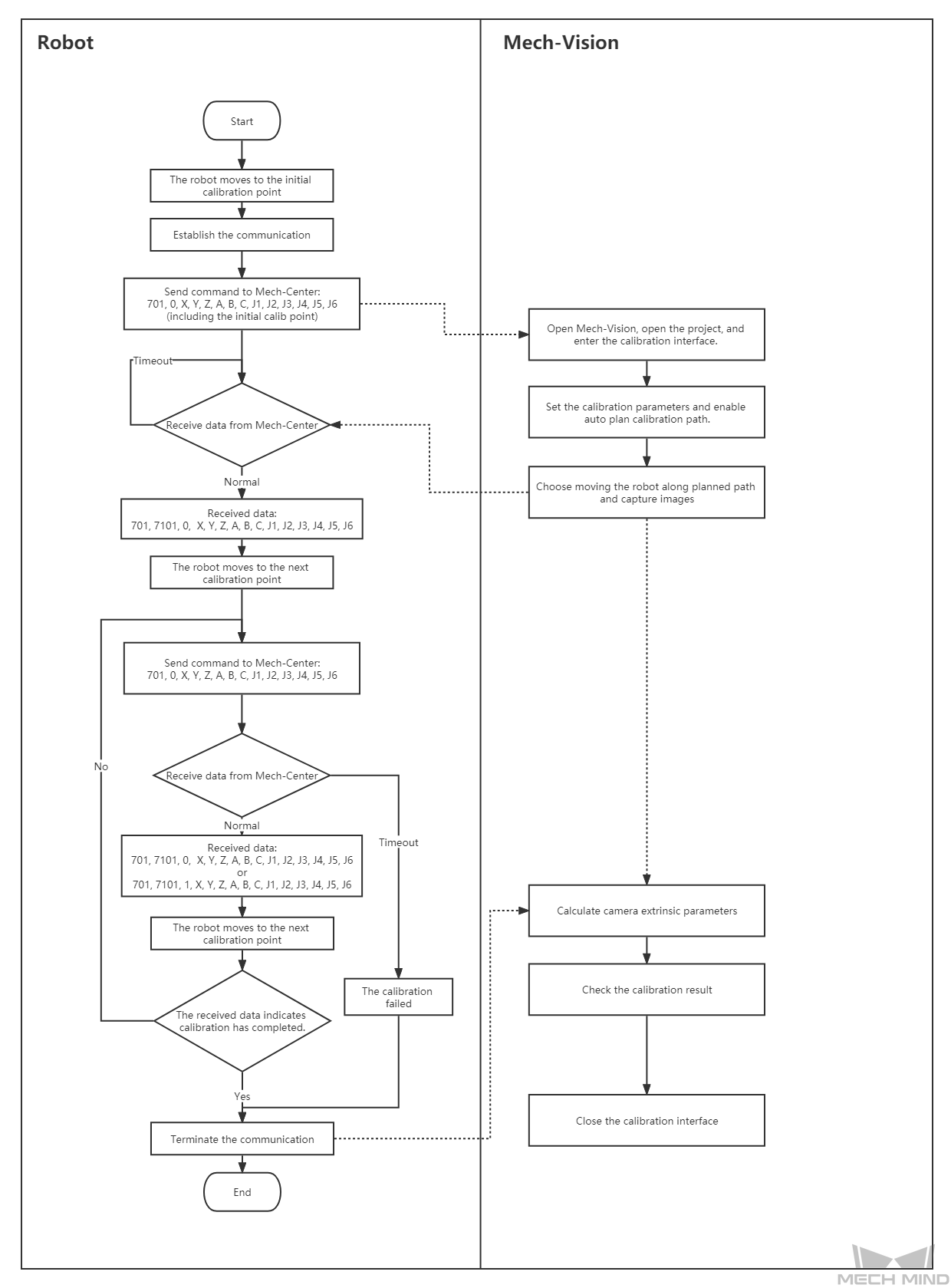
ロボット自動キャリブレーションの流れ¶
カメラの露出完了の信号を追加¶
PROFINETおよびEtherNet/IPプロトコルの標準インターフェイスには、タクトタイムを改善するために使用される カメラ露出完了 信号があります。Mech-Visionプロジェクトの実行時間が長い場合、カメラ露光終了後すぐにロボットの位置を移動させる必要があります。 カメラ露出完了 信号を作成するには、Mech-Visionプロジェクトにいくつかの設定が必要です。
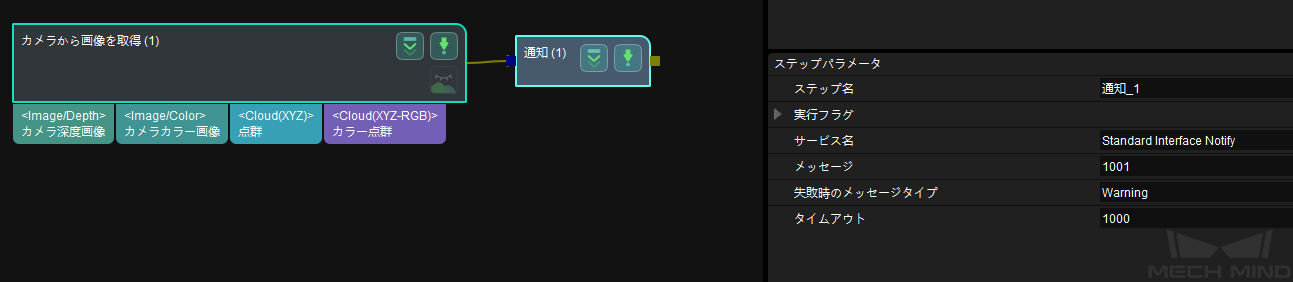
Mech-Visionプロジェクトに 通知 を追加し、 カメラから画像を取得 の制御フローにつなぎます。 カメラから画像を取得 の にチェックを入れます。
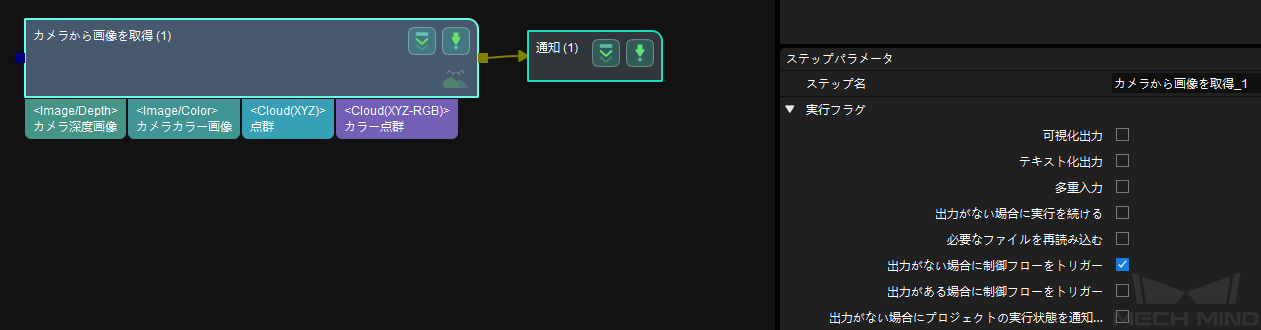
通知 のサービス名を Standard Interface Notify に、メッセージ内容を 1001 に設定します(1001のメッセージ内容は変更不可)。
Mech-Visionプロジェクトを実行すると、カメラの露光が終了すると、PLC/ロボット側にExposure_Complete信号が送られます。Exposure_Complete信号を受信後、Reset_Exposure信号でExposure_Complete信号をリセットしてください。10秒以内にリセット信号を受信しないと、Mech-Centerデータ確認信号タイムアウト というエラーが報告されます。