3D Coarse Matching V2¶
Function
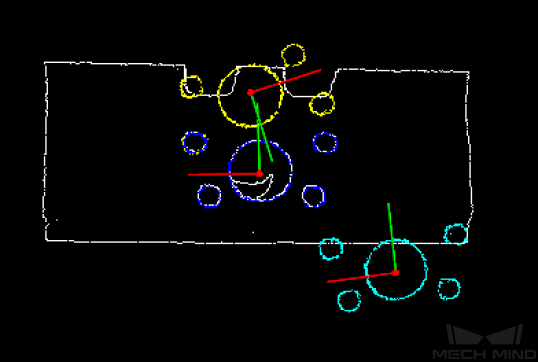
Coarsely match the point cloud model with the original point clouds and output the coarsely calculated candidate poses of the target objects.
Sample Scenario
Generally used to coarsely find the target objects in the point clouds and obtain their poses. This Step is usually followed by the 3D Fine Matching Step.
Input and Output
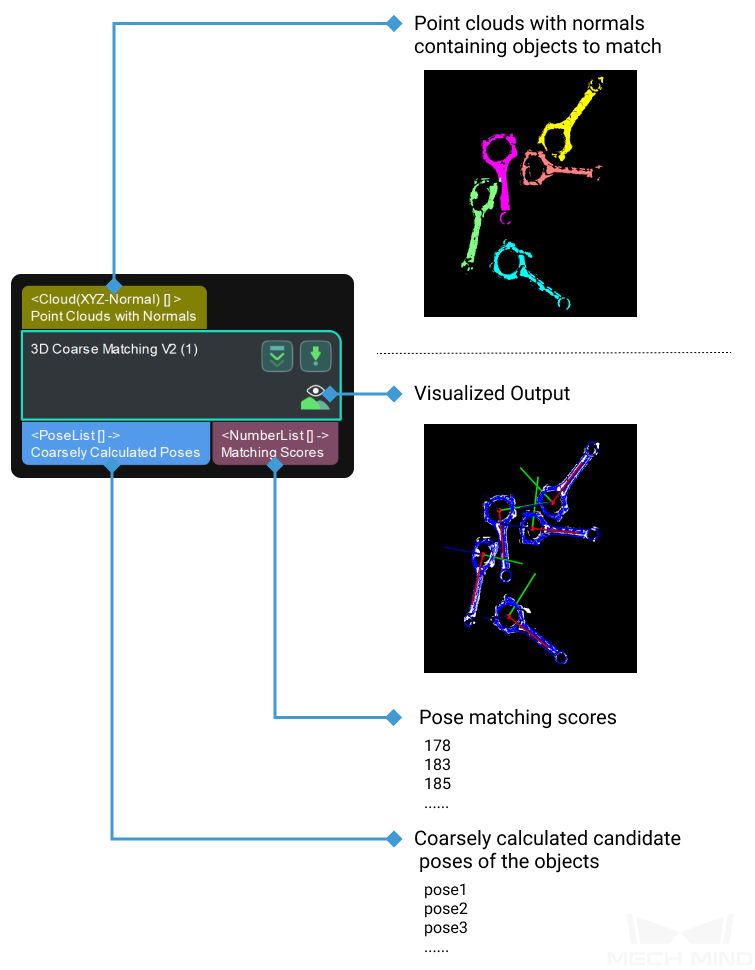
Parameters
Parameters Tuning Level
Basic Tuning Level
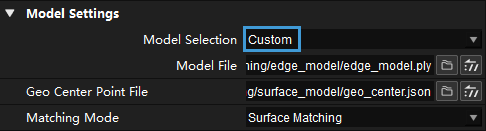
Model Settings
- Model Selection
Click on ▼ to select a point cloud model saved in the model gallery (the \resource\3d_matching directory under the project folder).
Once you select a point cloud model, its path and the path of its geometric center file are automatically displayed in Model File and Geo Center Point File below.
Note
The drop-down list of ▼ only displays the folders containing point cloud models and the associated geometric center/pick point files in the model gallery.
You can use Matching Model and Pick Point Editor to easily generate, edit and save point cloud models and the corresponding geometric centers/pick points.
- Model File
Display the path of the selected point cloud model file.
Instructions: click on
to select a point cloud model file in PLY format.
- Geo Center Point File
Display the path of the selected geometric center file.
Instructions: click on
Note
If the point cloud model file and geometric center file you selected are not located in the same folder in the model gallery, the display of Model Selection changes to Custom.
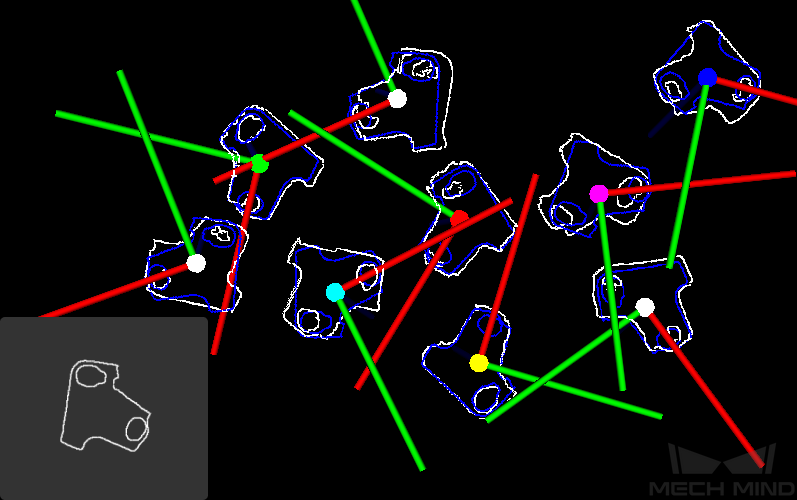
- Matching Mode
If the selected point cloud model represents the object edge, as shown below, please select Edge Matching.
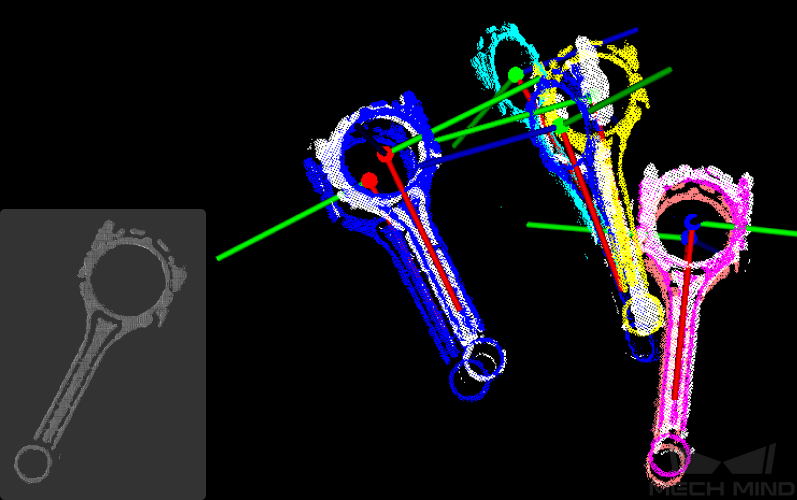
If the selected point cloud model represents the object surface, as shown below, please select Surface Matching.
Preprocessing Settings
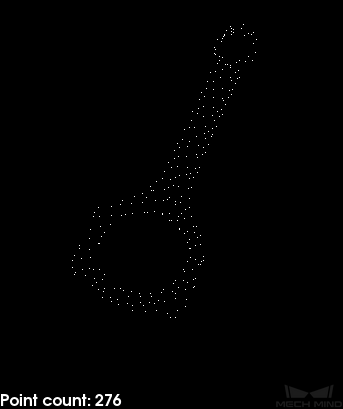
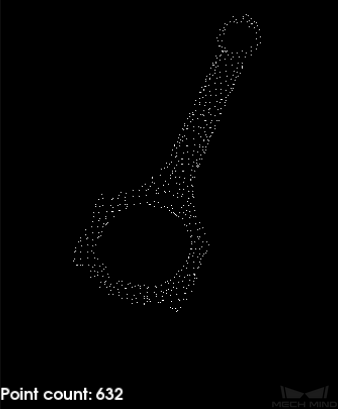
- Expected Point Count of Sampled Model
Set value
300
600
Point cloud model
Point count
276
632
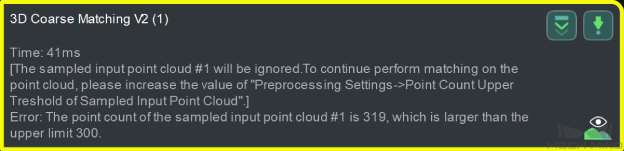
- Point Count Upper Threshold of Sampled Input Point Cloud
If the number of points in the input point cloud after sampling exceeds this value, this point cloud is ignored and empty data will be output, and the following error message is displayed.
Pose Verification Settings
- Expected Number of Detected Poses per Input Point Cloud
Set value
1
3
Output
Advanced Tuning Level
Voting Settings
- Upper Limit of Point Pair Count per Feature
- Distance Quantification
- Angle Quantification
- Vote Ratio Lower Threshold
- Referring Point Sampling Step
- Referred Point Sampling Step
Pose Filtering Settings
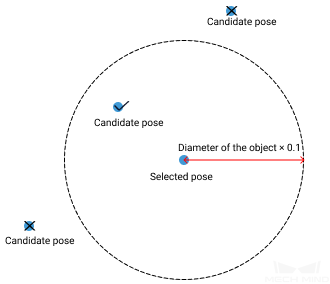
- Use Distance NMS
- Filter Candite Pose by Axis
Pose Verification Settings
- Voxel Length Generation Strategy
Note
If you divide the space occupied by the point cloud into a 3D grid, each unit cube in this grid is a voxel. Voxel length is the length of the cube edge.
- Voxel Length (Displayed if Voxel Length Generation Strategy is set to Manual)
- Voxel Length Lower Limit
- Voxel Length Upper Limit
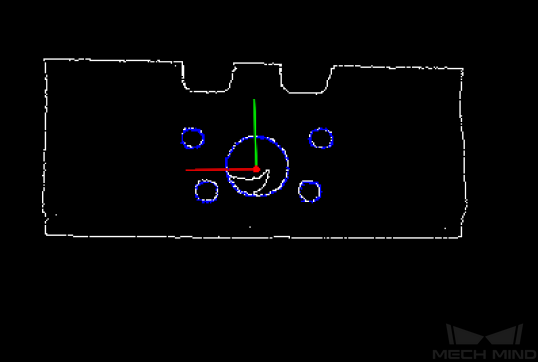
Result Verification
- Visualization Option
Option
Example
Sampled Model The point cloud model after sampling
Sampled Scene The input point cloud after sampling
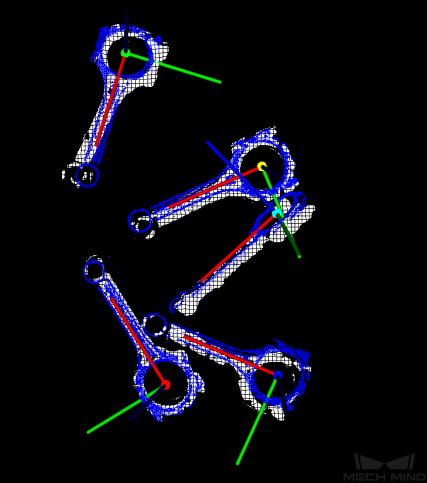
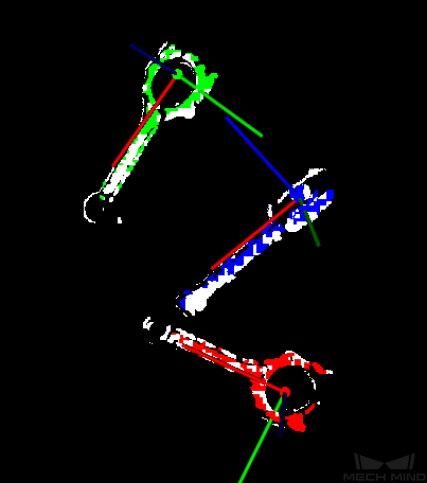
Registration Result The matching results
Points Used in Pose Verification The points used in pose verification