FANUC Setup Instructions¶
This section introduces the process of loading the standard interface program onto a FANUC robot.
The process consists of 4 steps:
Please have a flash drive ready at hand.
Check Controller and Software Compatibility¶
Compatibility requirements are as follows:
Robot: a 6-axis or 7-axis FANUC robot
Additional controller software packages:
R651 or R632 (karel)
R648 (User Socket Msg)
Controller system software version: V7.5, V7.7, V8.*, and V9.*
Setup the Network Connection¶
Hardware Connection¶
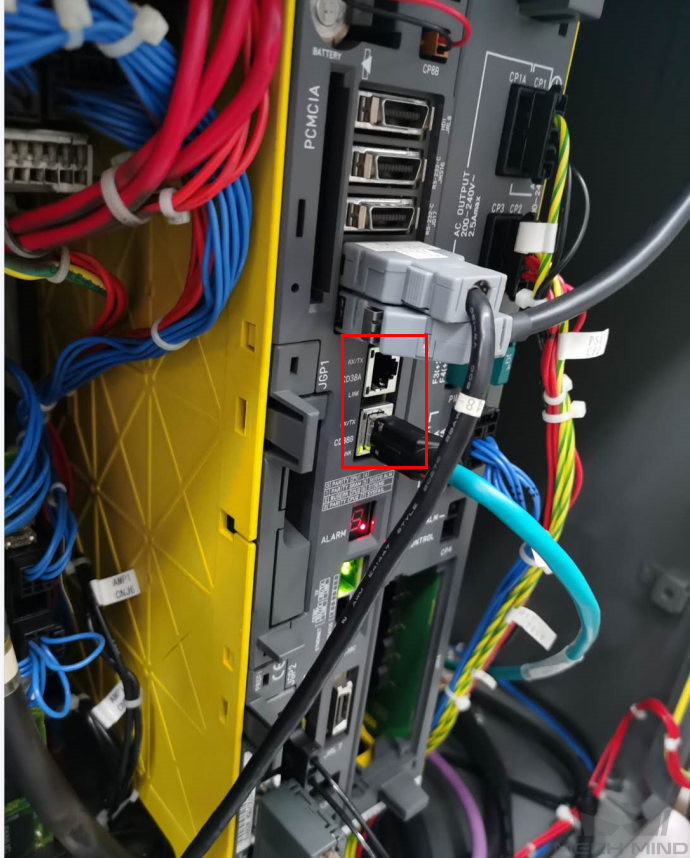
Plug the Ethernet cable of the IPC into the Ethernet port of robot controller as shown in the figure. You can plug the cable into either CD38A port or CD38B port. CD38A corresponds to Port#1 in the robot IP setting, while CD38B corresponds to Port#2.
IP Configuration¶
Press , and then select Host Comm in the context menu, and then press ENTER to open the SETUP Protocols window.

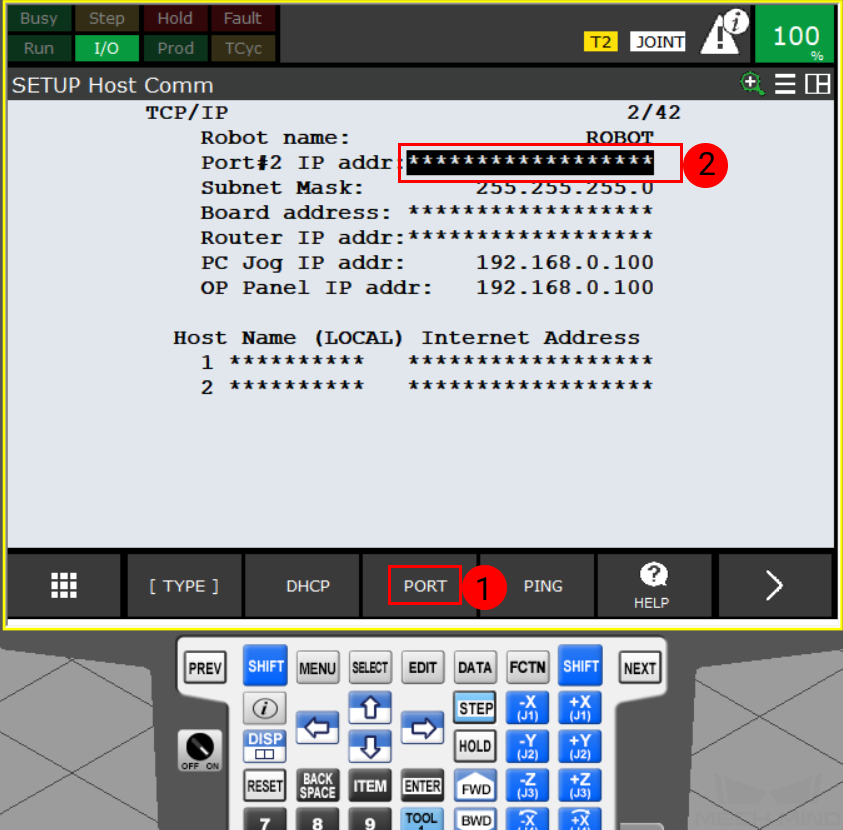
Select TCP/IP and press DETAIL to open the SETUP Host Comm window.

Enter the robot IP in the IP address line with the keyboard of the teach pendant. The robot IP should be in the same subnet as the IPC.
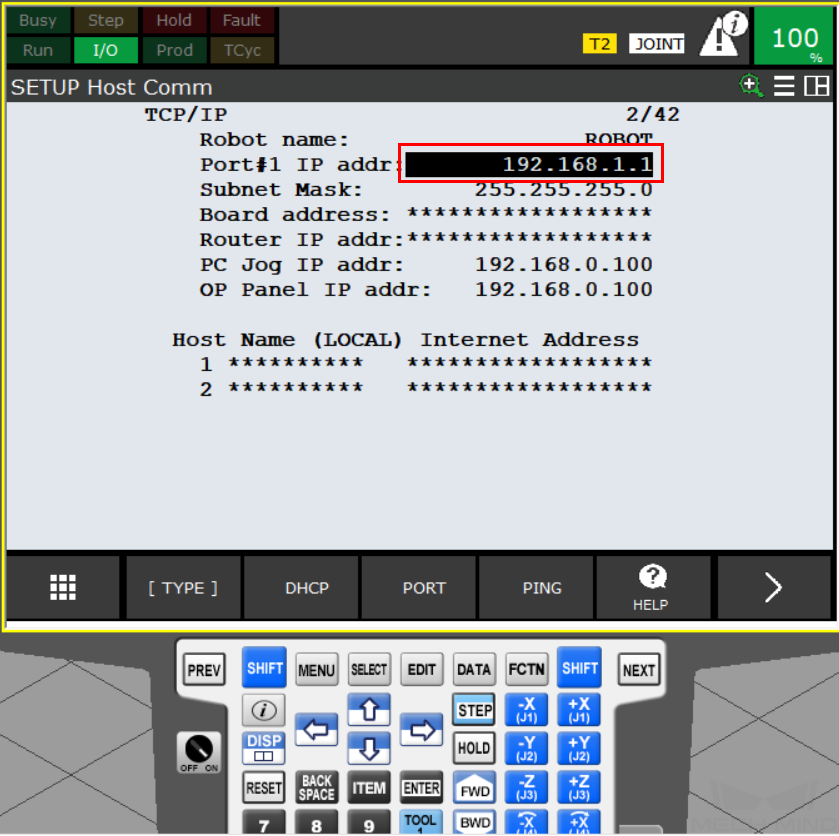
If the Ethernet cable is connected to port 2, please press Port to switch the port. Then you can enter the robot IP in the IP address line.
Load the Program Files¶
Prepare the Files¶
The program files are stored in the installation directory of Mech-Center. The default directory for Mech-Center 1.5.2 is C:/Mech-Mind/Mech-Center.
Navigate to xxx/Mech-Center/Mech-interface/fanuc, and copy all the contents of this folder to your flash drive.
Note
The folders and files must be saved in the root directory of the USB flash drive. Do not rename them.
Load the Files to the Robot¶
After connecting the USB flash drive, press MENU and select , and then press ENTER to open the FILE window.

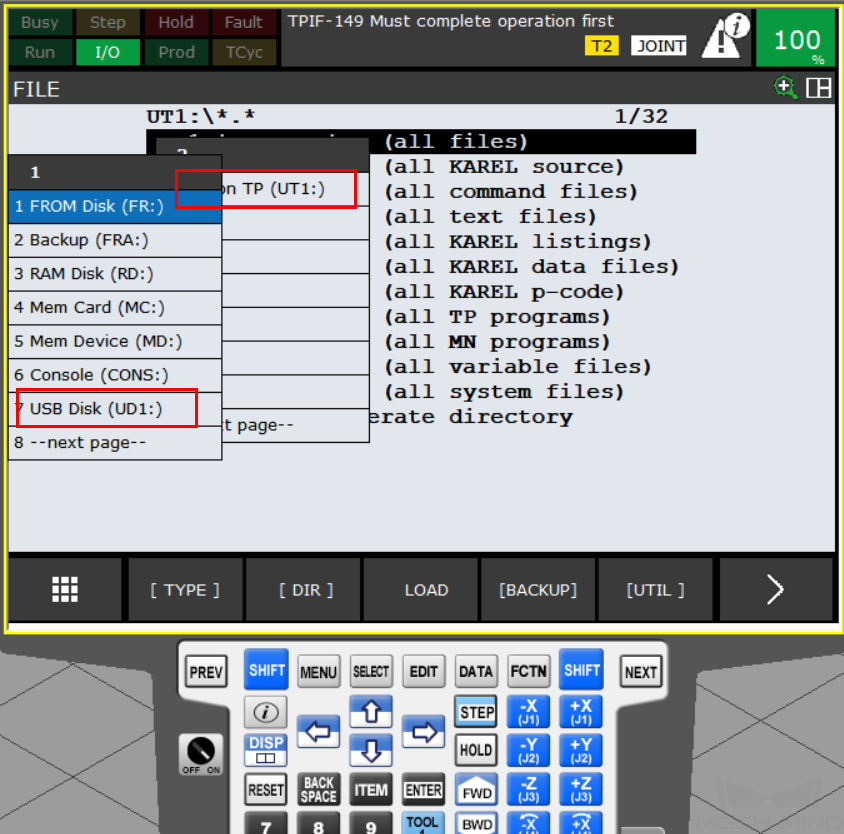
Press UTIL and select Set Device in the context menu.

Select the USB flash drive. If your flash drive is connected to the controller, please select USB Disk (UD1:); if your USB flash drive is connected to the teach pendant, please select USB on TP (UT1:).
Select the first line (all files) and press ENTER to enter the root directory of the USB flash drive.

Hint
For the next step:
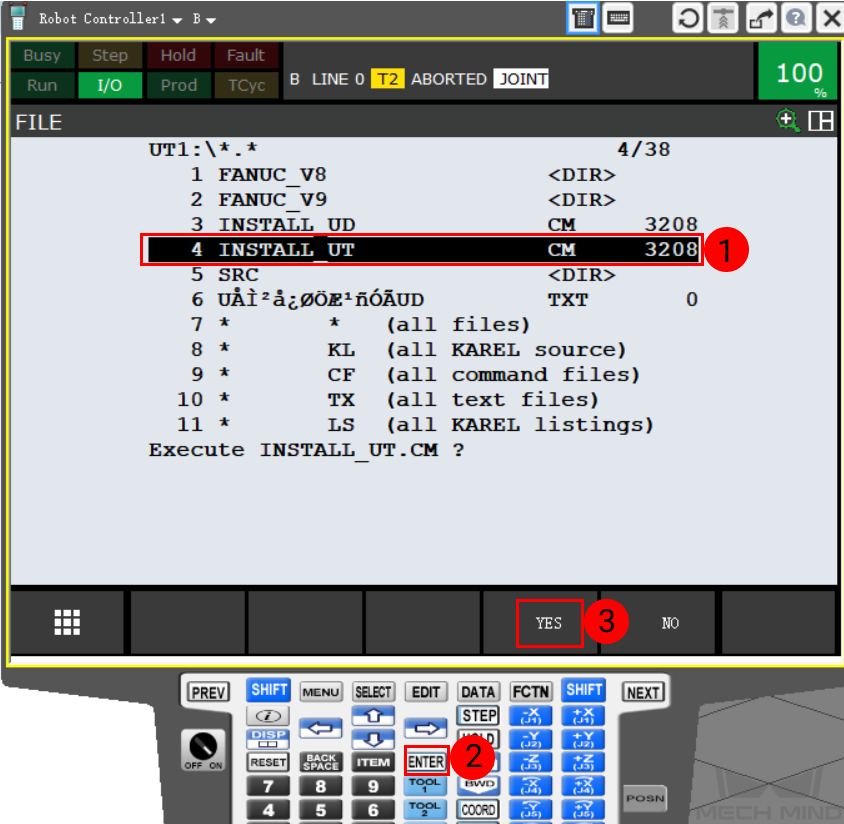
If the USB flash drive is connected to the robot controller, please select INSTALL_UD.cm.
If the USB flash drive is connected to the robot teach pendant, please select INSTALL_UT.cm.
Select the corresponding CM file and press ENTER key on the teach pendant. Choose YES to start loading the programs.
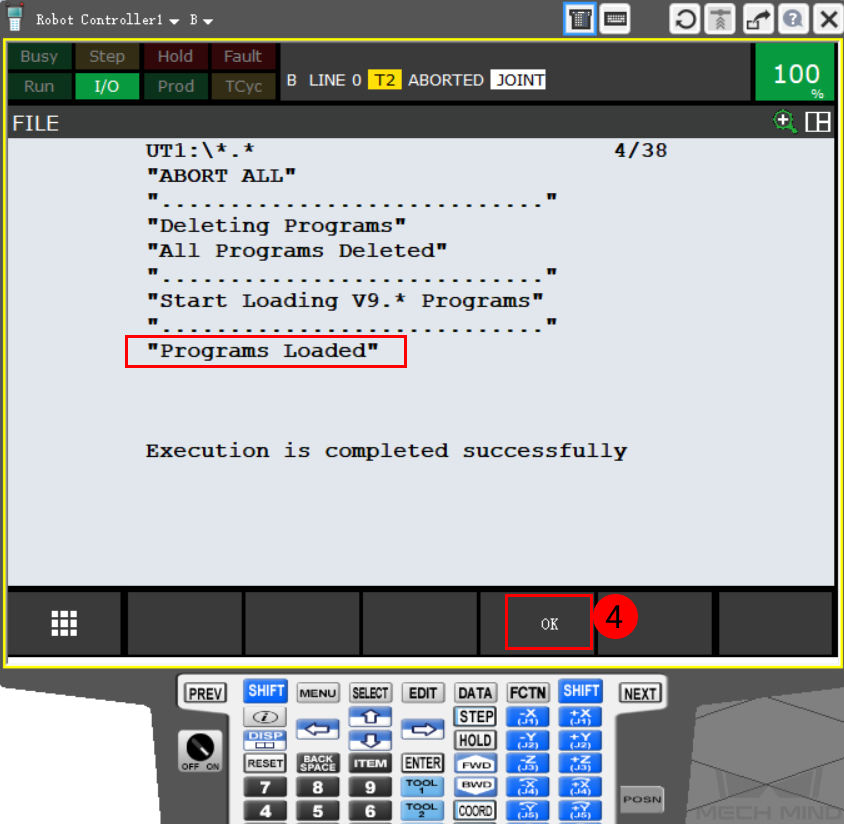
When the message “Programs Loaded” is displayed, the program files have been loaded successfully. Press OK to exit the program.
Further Configurations¶
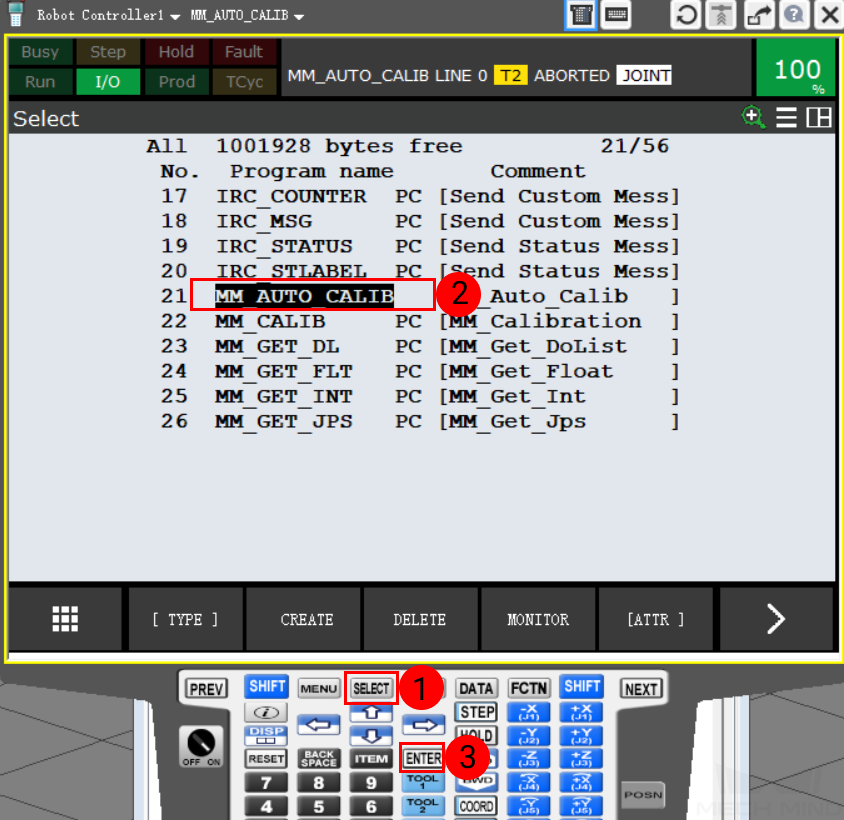
After loading the program files, press SELECT key on the teach pendant to enter the program selection interface. Select MM_AUTO_CALIB and then press ENTER to open the program.
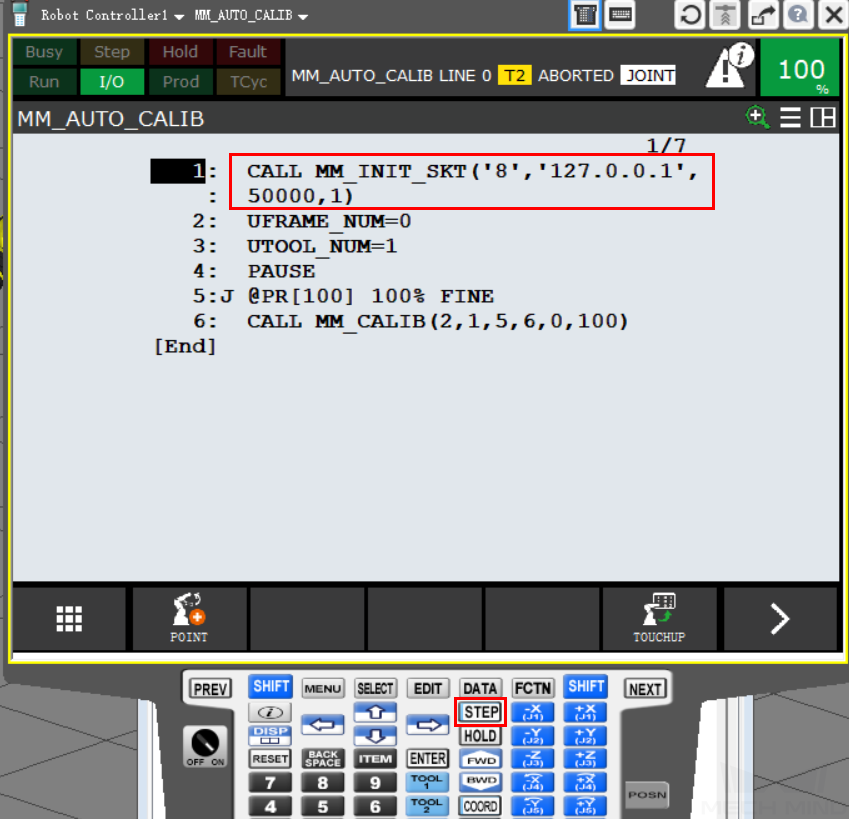
Configure the arguments of MM_INIT_SKT. There are 4 arguments in total. Please configure them according to your actual situation. Then, press STEP key to switch into Step mode.
Argument 1: client port number (string 1-8)
Argument 2: IP address of the IPC
Argument 3: server port number of the IPC
Argument 4: timeout (min)
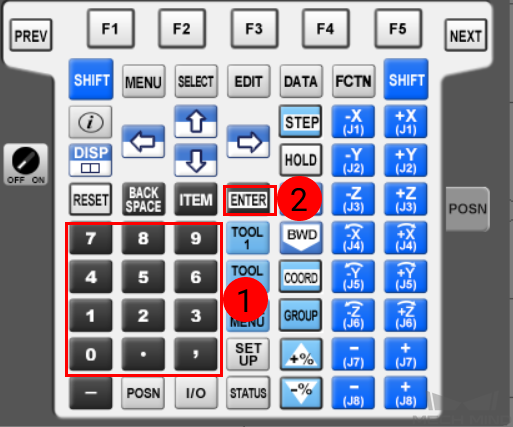
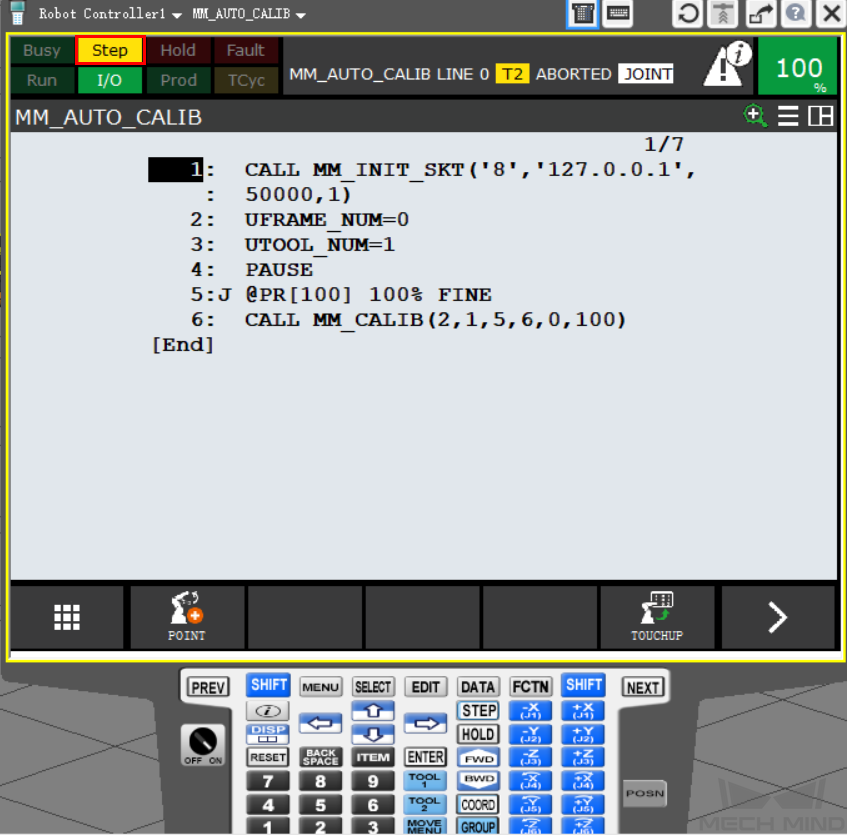
Now the Step icon on the teach pendant turns yellow as shown below.
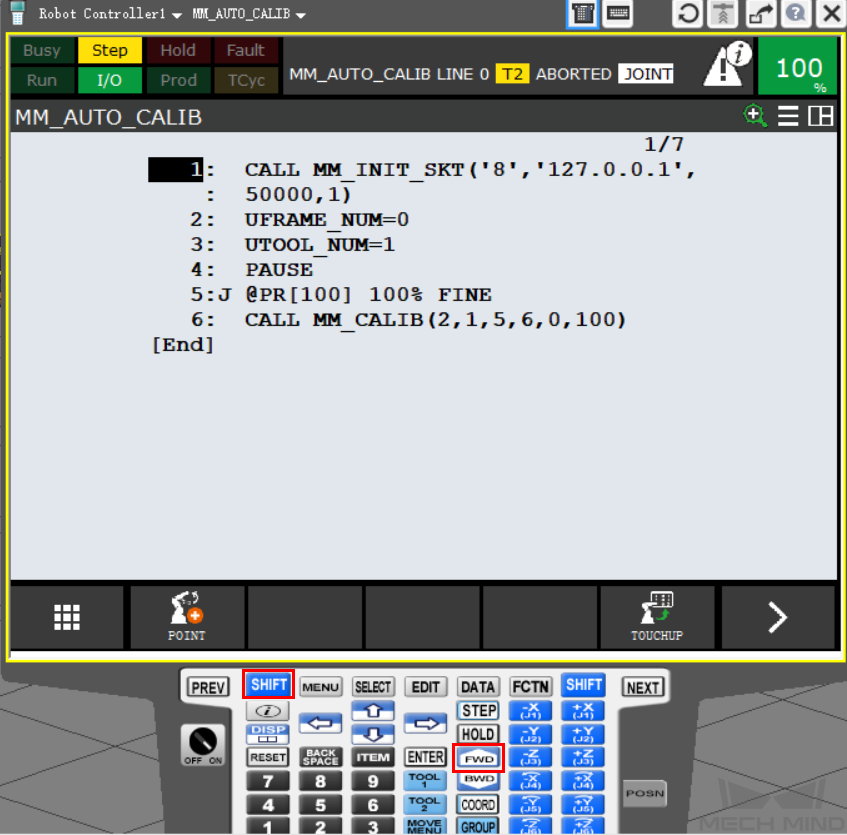
Press and hold either one of the deadman switches on the back of the teach pendant.

Press the SHIFT and FWD keys at the same time to run line 1.
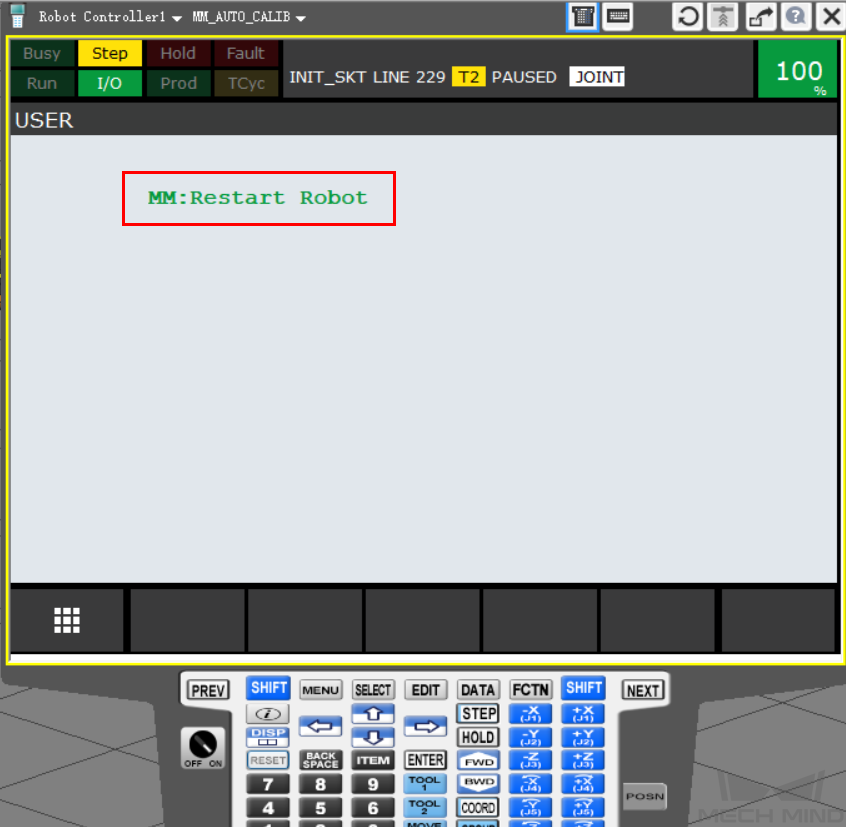
After running line 1 of the program, press MENU and then select USER.

If the message “MM:Restart Robot” appear on the screen, the program can be executed successfully on the robot. Please restart the robot later.
Test Robot Connection¶
Configuration in Mech-Center¶
Open Mech-Center and click on Deployment Settings.
Select Mech-Interface
Check Use Mech-Interface.
Select Standard Interface.
Select TCP Server, HEX and Big endian in Interface Options.
Select the robot model and click on Save to save the configurations.

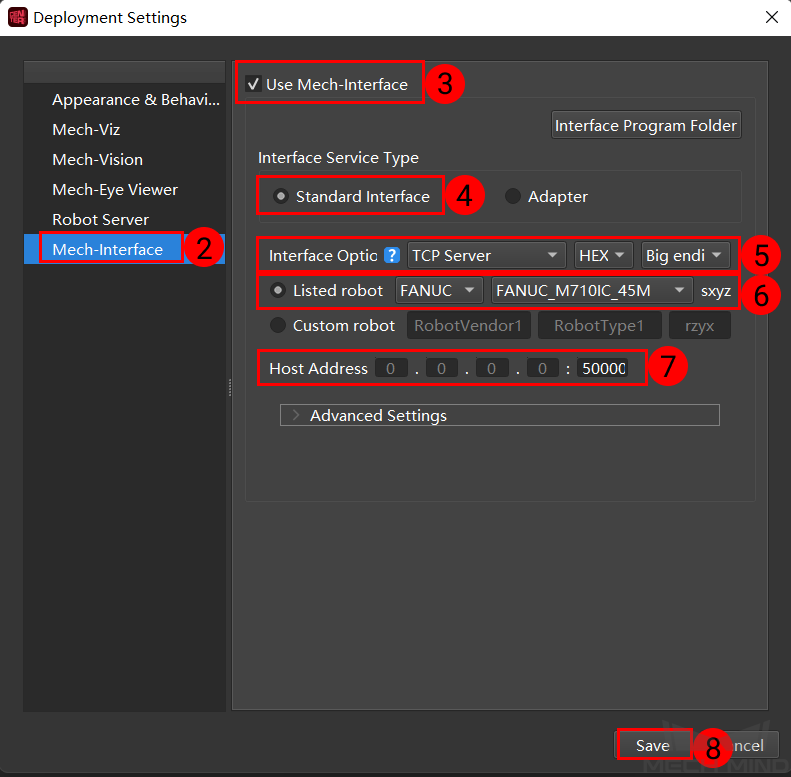
Note
The default port number is 50000. If it is modified, please modify the corresponding code in the robot program when initializing communication.
Test the Connection¶
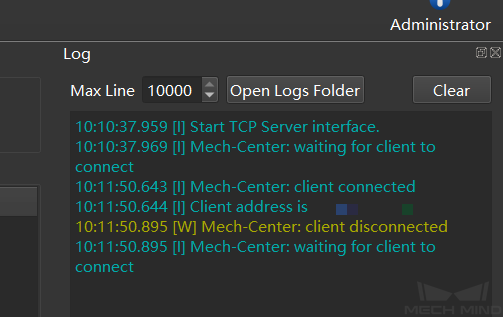
Start TCP Server interface in Mech-Center.
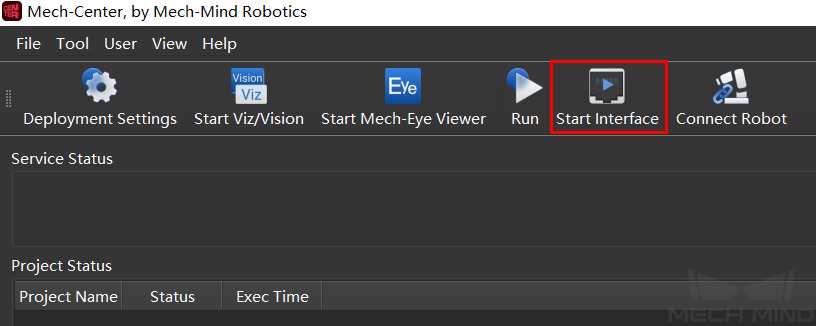
Run the first command of the program MM_AUTO_CALIB again according to the instructions mentioned before. If the message as shown below appear in the Log panel of Mech-Center, then the robot can be connected successfully.