AUBO Setup Instructions¶
This section introduces the process of setting up full control of an AUBO robot.
The process consists of 5 steps:
Check Controller Compatibility¶
The version of the controller should be above 4.5.44.
Go to to check the version of the controller.
Setup the Network Connection¶
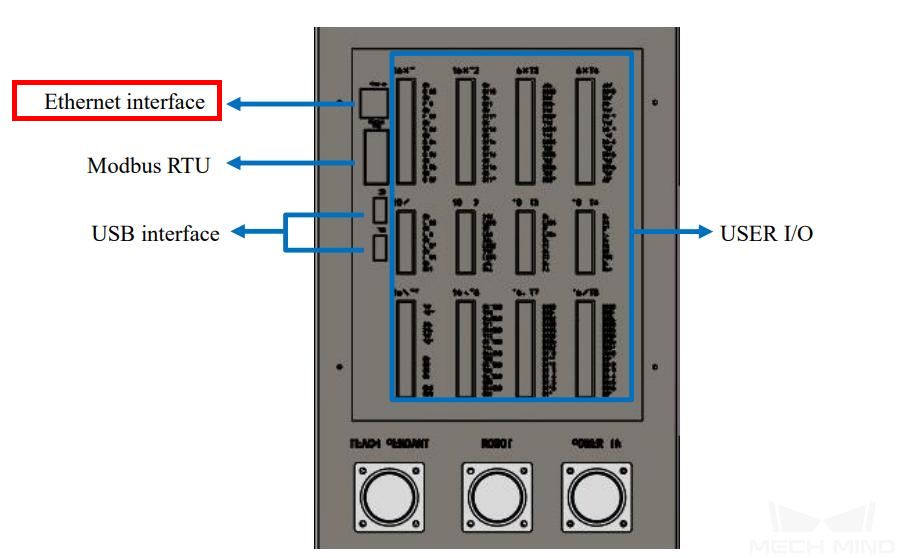
Hardware Connection¶
Plug the Ethernet cable into the Ethernet interface of the controller to connect the IPC and the robot controller.
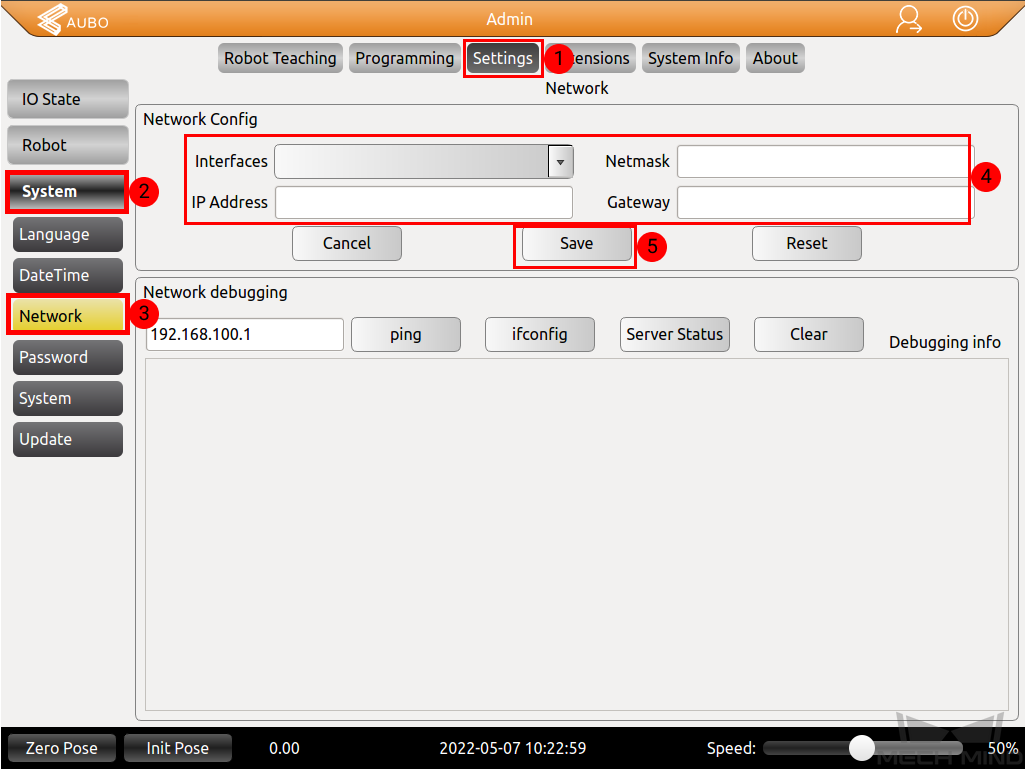
IP Configuration¶
Press on to configure the Interfaces, Netmask, IP Address, and Gateway, and then select Save. Please note that the robot IP should be in the same subnet as the IPC.
SDK Compatibility¶
Please download the AUBO Python-Dlls first.
Copy all the DLL files in the python-Dlls folder.
Locate the folder where python is installed on the IPC and paste all the DLL files into the DLLs folder (The default path is C:/Program Files/Python36/DLLs). The DLL files are as shown below.
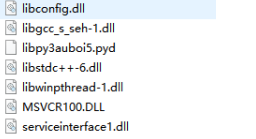
You do not need to load the files to the robot.
Test Robot Connection¶
Please refer to Test Robot Connection for detailed instructions.
Troubleshooting¶
After copying and pasting the files, if the robot cannot be connected successfully, and the error is DLL load failed: %1 is not a valid Win32 application, please check whether the C++ runtime library on your computer is complete. The complete C++ runtime library is as shown below.
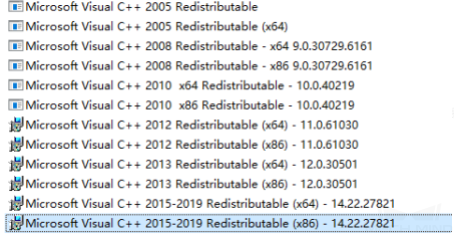
If the library is not complete, please download the vc runtime library repair DirectX Repair V3.9 to fix the error.