mission & mission_exit¶
mission is used to process multi-layer tasks.
mission_exit is applied in the situation that there are multiple possible results by the program, select an exit port to exit current mission; if the multiple outputs are not involved in mission, use mission alone.
Example of mission_exit is used¶
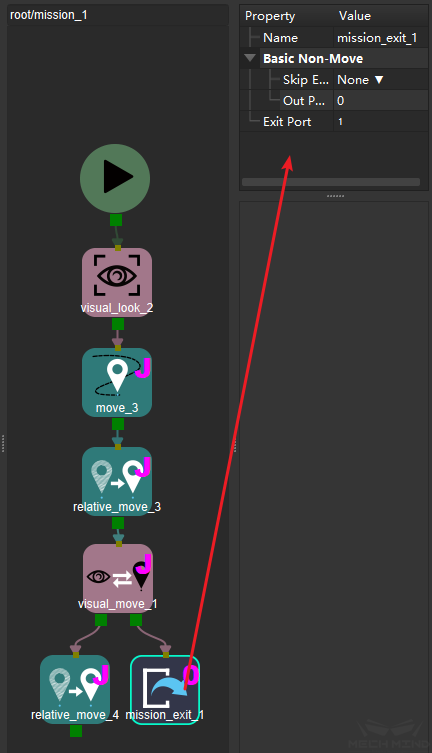
As shown in the figure, there is a visual_move in this mission. Due to the possibilities of visual recognition: success and no pose or failed to pick, the two exits are required to connect different processing logics respectively. Perform the following operation:
Connect mission_exit module at the port2 of visual_move;
Set the exit_port in the property of mission_exit to 1. (exit_port defaults to 0)
Back to the previous layer, you may see that the mission becomes two output ports, and users can connect them with different processing logic as required.

Example for using mission alone¶
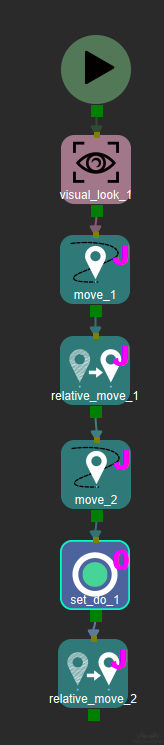
In the figure above, the process flow in mission does not have multiple possible results. This mission has only one output port. As shown in the figure below, when the program finishes running the last module, it will jump out of mission directly.
