 notify¶
notify¶
Description¶
Use this module when the program proceeds to a node and the external device is required for the process
For example, when a certain branch is proceeded by the program and an external device is required to send a branch command again, a notify module can be connected at the end of this branch, and a message is sent to the adapter to obtain the command of the external device
Parameters¶
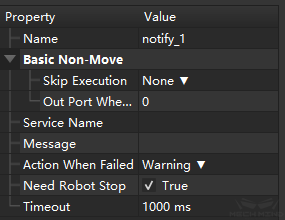
- BasicNonMove
- serviceName
The adapter obtains the message of this module by service name. If there are multiple notify modules in the project, all notify modules should use the same service name
- message
The adapter executes different logic according to the content of the message, such as if the branch operation ends, the message can be set to: finish
- actionWhenFailed
when the notify message is not sent successfully, the actions done by the software
- needRobotStop
the default is True, the robot will pause when proceeding to this module; if set to False, the robot can send messages while running
- timeout
If no message is sent exceeding this time, perform the actions setted at actionWhenFailed, the unit is ms