레이저 프로파일러 퀵 스타트
이 부분에서는 개봉 검사부터 Mech-Eye Viewer를 사용하여 데이터를 획득하는 일련의 작업을 완료하는 방법을 소개합니다.
|
레이저 프로파일러를 사용해 본 적이 없다면 먼저 다음 내용을 읽고 레이저 프로파일러와 관련된 기본 지식을 알아보십시오.
|
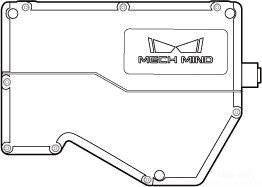
1. 개봉 검사

2. 인터페이스 및 표시등 확인
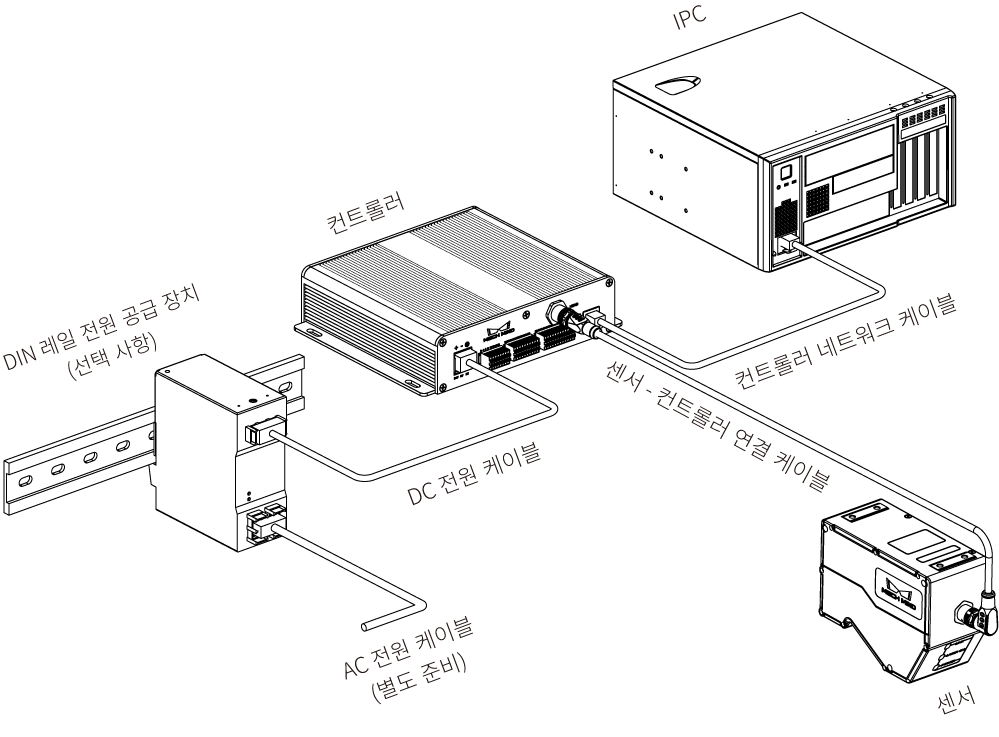
레이저 프로파일러는 센서와 컨트롤러로 구성됩니다. 다음 섹션에서는 레이저 프로파일러의 센서와 컨트롤러를 각각 소개합니다.
2.1. 센서
센서의 각 부분의 기능을 확인하려면 다음 그림과 표를 참조하십시오.

| 번호 | 명칭 | 기능 |
|---|---|---|
① |
레이저 이미터 |
레이저를 발사합니다. |
② |
감광 장치 |
대상 물체 표면에서 반사된 레이저를 수신하는 장치입니다. |
③ |
컨트롤러 포트 |
컨트롤러를 연결하기 위한 포트 |
④ |
LINK 표시등 |
꺼짐: 네트워크에 연결되어 있지 않음 |
녹색으로 깜박임: 데이터 전송 중(2.5Gbps) |
||
노란색으로 깜박임: 데이터 전송 중(10/100/1000Mbps) |
||
⑤ |
LASER ON 표시등 |
꺼짐: 레이저를 발사하지 않음 |
점등: 레이저를 발사하는 중 |
||
⑥ |
POWER 표시등 |
꺼짐: 전원에 연결되어 있지 않음 |
녹색으로 켜져 있음: 전압 정상 |
||
⑦ |
차광 장치 장착 구멍 |
센서에 차광 장치를 장착하는 데 사용됩니다. |
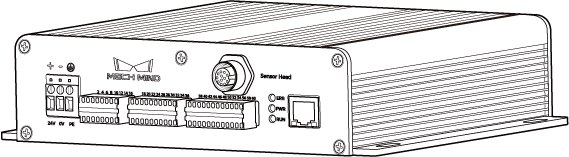
2.2. 컨트롤러
아래 그림 및 표를 참조하여 컨트롤러의 각 인터페이스 및 표시등의 기능을 확인하십시오.

| 번호 | 명칭 | 기능 |
|---|---|---|
① |
센서 포트 |
센서를 연결하기 위한 포트 |
② |
RUN 표시등 |
켜짐: 이미지를 캡처하는 중 |
꺼짐: 캡처하고 있지 않음 |
||
③ |
PWR 표시등 |
녹색으로 켜져 있음: 전압 정상 |
꺼짐: 전압이 비정상이거나 전원에 연결되어 있지 않음 |
||
④ |
ERR 표시등 |
깜박임: 오류 발생 |
꺼짐: 정상 |
||
⑤ |
전원 케이블 포트 |
24V: +24V 직류 입력 |
0V: 0V 직류 입력 |
||
PE: 접지 |
||
⑥ |
입력 신호 단자대 |
상세한 내용은 입력 신호 단자대를 참조하십시오. |
⑦ |
출력 신호 단자대 |
상세한 내용은 출력 신호 단자대를 참조하십시오. |
⑧ |
엔코더 신호 단자대 |
엔코더를 연결하기 위한 포트 상세한 내용은 엔코더 신호 단자대를 참조하십시오. |
⑨ |
네트워크 표시등 |
깜박임: 데이터 전송 중 |
꺼짐: 데이터 전송 없음 |
||
⑩ |
RJ45 네트워크 포트 |
네트워크 케이블을 연결하기 위한 RJ45 플러그. |
3. 설치 및 연결
3.1. 센서 설치
3.1.1. 설치 시 주의사항
센서를 설치하기 전에 다음 주의 사항을 확인해 주시기 바랍니다.
-
대상 물체의 모양으로 인해 사각이 발생할 수 있습니다. 센서를 장착하기 전에 사각이 스캐닝에 미치는 영향을 판단해야 합니다. 본 제품의 레이저 빔은 평행하게 방출되므로 사각이 거의 없습니다.
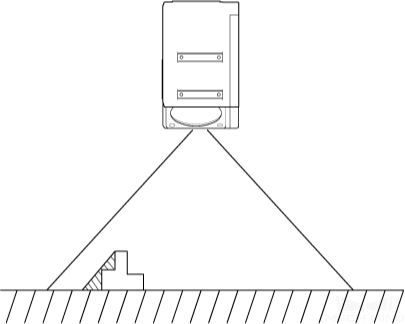
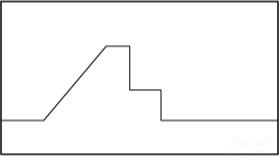
그림자 영역은 사각을 나타냄
획득한 프로파일
-
설치 시 대상 물체에서 반사된 레이저 빔이 차단되지 않고 수신 장치에 도달할 수 있는지 확인하십시오.

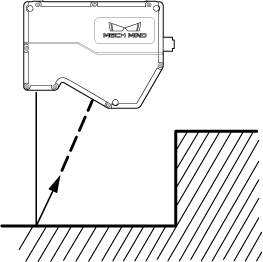
잘못된 예시
올바른 예시
-
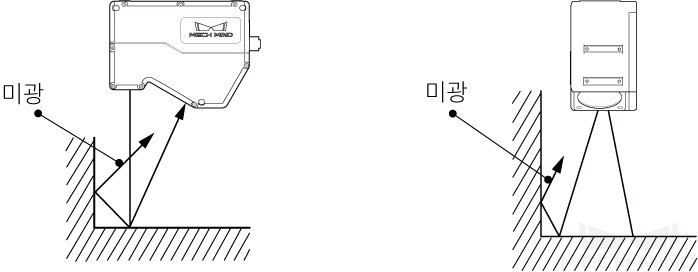
레이저 빔이 벽과 같은 주변 물체에 반사되면 미광이 생성됩니다. 센서를 장착하기 전에 스캐닝에 대한 미광의 영향을 평가하십시오.
-
센서의 산열이 잘 되도록 하려면 적어도 한쪽 면이 200c㎡ 이상인 금속판에 장착하십시오.
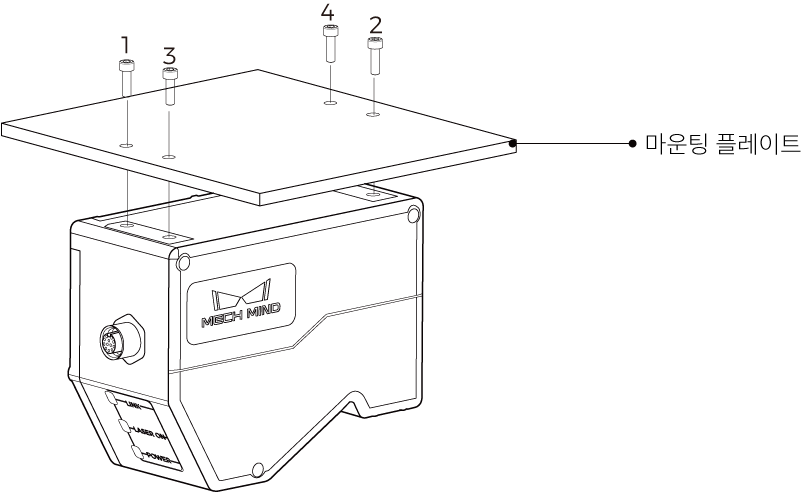
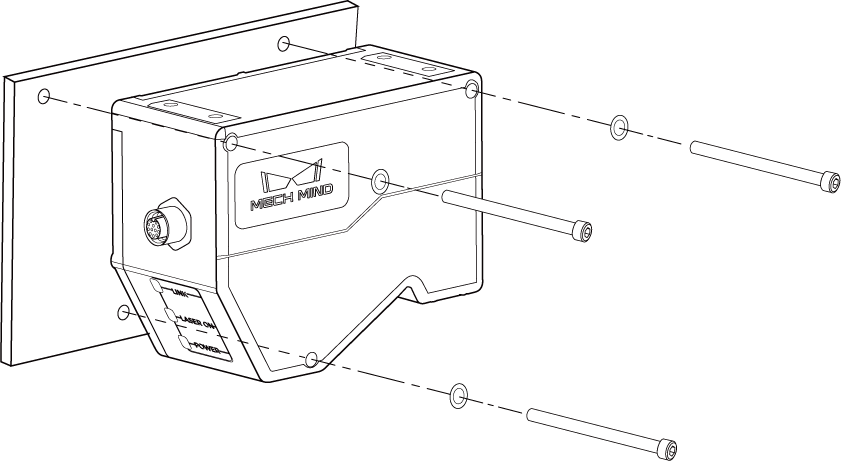
3.1.2. 설치
|
마운팅 플레이트가 너무 두꺼운 경우 적절한 길이의 M5 볼트를 준비하십시오. M5 너트와 오픈엔드 렌치(양구 스패너)를 준비하십시오. |
레이저 프로파일러를 설치할 때 레이저 프로파일러의 기준 거리 내용을 참조하십시오.
3.2. 센서와 컨트롤러 연결
센서-컨트롤러 케이블의 직각 커넥터를 센서의 컨트롤러 포트에 연결하고 직선 커넥터를 컨트롤러의 센서 포트에 연결합니다.
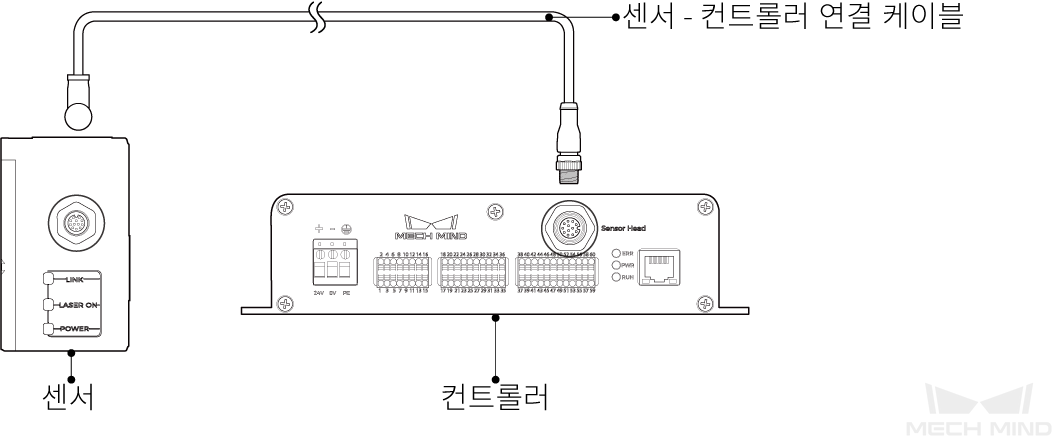
-
센서 - 컨트롤러 연결 케이블의 항공 커넥터 돌출부를 해당 노치에 맞춰서 삽입합니다.

-
너트를 타이트하게 조입니다. 너트를 조일 때 토크의 권장값: 0.7N·m. 너트를 완전히 조인 후에도 약 2mm의 간격이 남습니다.

|
와이어나 커넥터가 변형되어 손상되지 않도록 와이어를 올바르게 고정하십시오. |
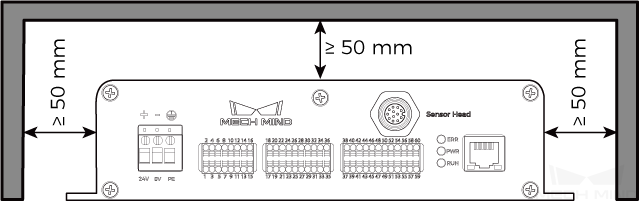
3.3. 컨트롤러 설치


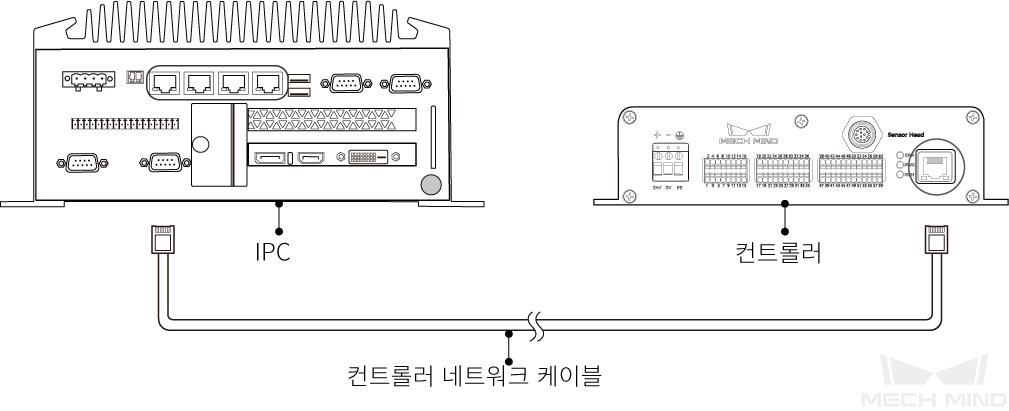
3.4. 컨트롤러와 IPC 연결
컨트롤러의 네트워크 케이블의 한쪽 끝을 컨트롤러의 RJ45 네트워크 포트에 삽입하고 다른 쪽 끝을 IPC의 RJ45 네트워크 포트에 삽입합니다.
|
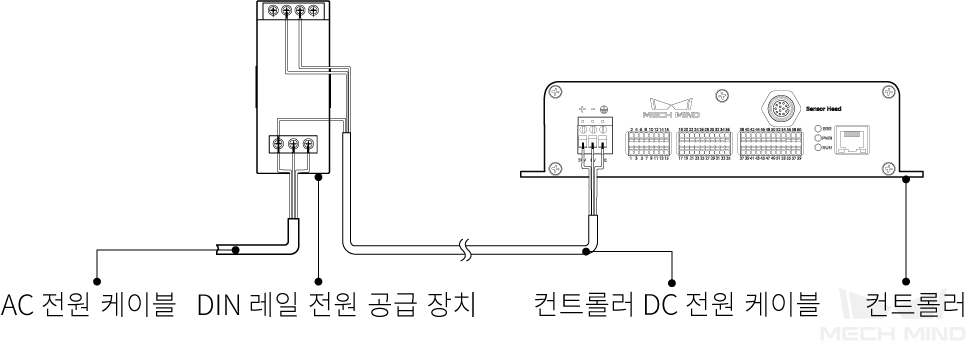
3.5. 컨트롤러와 DIN 레일 전원 공급 장치 연결
|
이 부분 내용은 Mech-Mind에서 제공한 DIN 레일 전원 공급 장치를 사용하는 경우를 예시로 합니다. 자체적으로 준비한 DIN 레일 전원 공급 장치를 사용하는 경우, 해당 사용자 설명서를 참조하여 연결하십시오. |
|
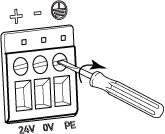
3.5.1. DC 전원 케이블을 컨트롤러의 전원 단자에 삽입
-
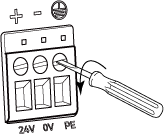
일자 드라이버를 사용하여 전원 단자 위의 나사를 풉니다.
-
와이어를 해당 단자에 삽입하십시오. 양극선을 24V 단자에, 음극선을 0V 단자에, 접지선을 PE 단자(
 )에 삽입합니다.
)에 삽입합니다.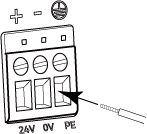
-
일자 드라이버를 사용하여 전원 단자 위의 나사를 조이십시오. 조일 때 토크의 권장값은 0.2N·m입니다.
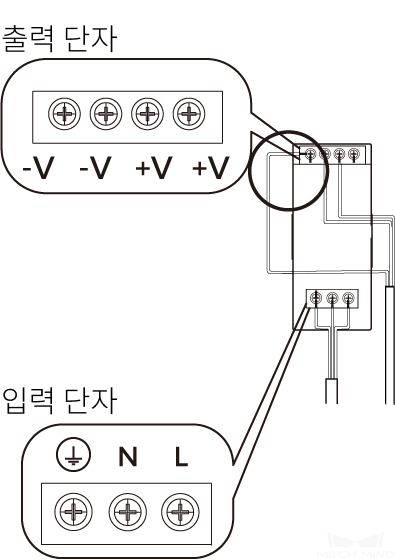
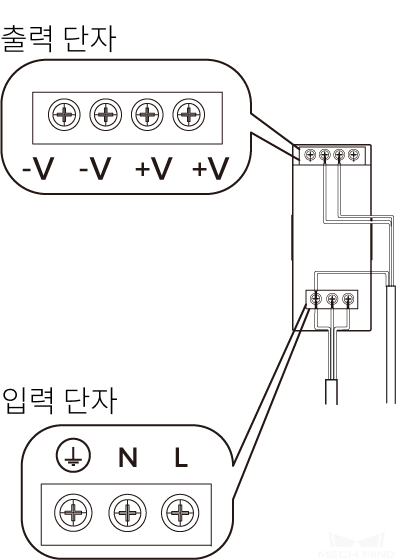
3.5.2. DC 전원 케이블을 DIN 레일 전원 공급 장치의 단자에 삽입하기
-
일자 드라이버를 사용하여 단자 위의 나사를 풉니다.
-
양극선을 +V 단자에, 음극선을 -V 단자에, PE 선을 접지 단자(
)에 삽입합니다. -
일자 드라이버를 사용하여 단자 위의 나사를 조이십시오.
3.5.3. AC 전원 케이블을 DIN 레일 전원 공급 장치의 입력 단자에 삽입
-
일자 드라이버를 사용하여 입력 단자 위의 나사를 풉니다.
-
활선을 L 단자에, 중성선을 N 단자에, PE 선을 접지 단자(
)에 삽입합니다. -
일자 드라이버를 사용하여 입력 단자 위의 나사를 조이십시오.
|
|
잘못된 예시 |
올바른 예시 |
|---|
|
3.6. 컨트롤러와 외부 장치 연결
레이저 프로파일러에 데이터 획득 트리거 신호를 제공하거나 외부 장치에 데이터 획득 상태 신호를 제공하기 위해 PLC 및 엔코더와 같은 외부 장치를 컨트롤러의 해당 단자에 연결할 수 있습니다.
외부 장치를 연결해야 하는 경우에는 신호 회로 다이어그램 및 신호 단자대에 관한 설명 내용을 참조하여 신호 단자의 사양 및 기능을 확인하시기 바랍니다.
연결할 단자를 확인한 후 다음 단계에 따라 컨트롤러의 해당 단자에 전선을 연결하십시오.
-
와이어를 삽입할 단자를 선택하고 일자 드라이버를 사용하여 위/아래 버튼을 누릅니다.
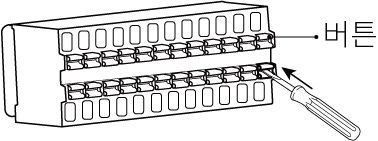
-
와이어을 단자에 삽입한 후 일자 드라이버를 제거합니다.
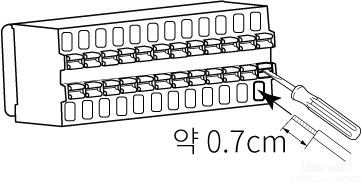
-
와이어의 노출된 부분의 길이는 약 1cm 여야합니다. 노출된 부분이 너무 짧으면 배선이 실패할 수 있습니다.
-
와이어의 노출된 부분이 느슨해지면 노출된 부분을 함께 꼬아준 후 와이어를 단자에 삽입하십시오.
-
-
와이어를 부드럽게 잡아 당깁니다. 올바르게 삽입되면 와이어가 빠지지 않아야 합니다. 와이어가 빠져 있으면 다시 삽입하십시오.
와이어를 너무 강하게 당기지 마십시오. 강제로 전선이 당겨져 노출된 부분이 손상될 수 있습니다.
와이어를 뽑아야 하는 경우에는 일자 드라이버로 단자 위/아래의 버튼을 누른 후 당겨 빼십시오.
레이저 프로파일러 하드웨어의 설치와 연결이 완료되었습니다. 다음으로 Mech-Eye Viewer를 사용하여 레이저 프로파일러를 연결하고 이미지를 캡처하는 방법을 소개하겠습니다.
4. Mech-Eye SDK의 다운로드 및 설치
Mech-Mind 다운로드 센터에서 Mech-Eye SDK 설치 패키지를 다운받을 수 있습니다.
설치 패키지의 압축을 푼 후 설치 파일을 더블클릭하면 Mech-Eye SDK를 설치할 수 있습니다. Mech-Eye SDK의 다운로드, 설치, 업그레이드 및 제거에 대한 더 많은 정보는 Mech-Eye SDK 소프트웨어 설치 가이드 내용을 참조해 주시기 바랍니다.
5. IP 주소 설정
레이저 프로파일러를 연결하기 전에 다음 두 개의 IP 주소가 동일한 네트워크 세그먼트에 있고 IP 주소가 고유한지 확인하십시오.
-
레이저 프로파일러의 IP 주소
-
레이저 프로파일러에 연결된 컴퓨터 네트워크 포트의 IP 주소
레이저 프로파일러 출고 시 기본 IP 설정은 다음과 같습니다.
IP 주소 할당 방식 |
고정 IP |
|---|---|
IP 주소 |
192.168.23.203 |
서브넷 마스크 |
255.255.255.0 |
게이트웨이 |
0.0.0.0 |
다음 단계에 따라 레이저 프로파일러의 IP 주소를 설정하십시오.
-
Mech-Eye Viewer를 두 번 클릭하여 엽니다.
-
연결할 레이저 프로파일러를 선택하여
 버튼을 클릭하십시오.
버튼을 클릭하십시오.
6. 레이저 프로파일러 연결
-
Mech-Eye Viewer에서 연결할 레이저 프로파일러를 선택하여 연결 버튼을 클릭하십시오.
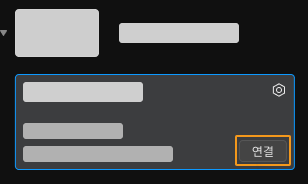
|
소프트웨어나 펌웨어를 업그레이드해야 할 경우 업그레이드 버튼이 표시됩니다. 이 버튼을 클릭하여 업그레이드한 후 레이저 프로파일러를 연결하십시오. |
7. 데이터 획득
레이저 프로파일러는 물체를 한 줄씩 스캔하여 데이터를 획득합니다. 각 라인을 스캔할 때 원시 이미지(1장)가 획득됩니다. 원시 이미지의 각 픽셀 열에서 하나의 점(추출점)을 추출하여 프로파일을 구성합니다. 마지막으로 여러 라인의 프로파일을 결합하여 광도 이미지, 뎁스 맵 및 포인트 클라우드를 생성합니다.
Mech-Eye Viewer는 두 가지 데이터 획득 모드를 제공합니다.
-
프로파일 모드: 요구 사항을 충족할 수 있는 프로파일을 얻기 위해 프로파일과 관련된 파라미터를 조정합니다.
-
스캔 모드: 요구 사항을 충족할 수 있는 광도 이미지, 뎁스 맵과 포인트 클라우드를 얻기 위해 관련 파라미터를 조정합니다.
7.1. 예시 시나리오
다음 내용은 이 예제 시나리오를 기반으로 합니다.
-
데이터 획득 과정은 Mech-Eye Viewer에 의해 트리거됩니다.
-
각 라인의 스캔은 엔코더에 의해 트리거됩니다.
-
대상 물체는 레이저 프로파일러를 기준으로 한 방향으로 이동입니다.
-
이 예시 중의 대상 물체는 금속 블록이고 치수는 약 80×35×8mm이다.
7.2. 프로파일 획득
요구 사항을 충족할 수 있는 프로파일을 획득하기 위해 다음 단계를 따라 작업하십시오.
-
 버튼을 클릭하여 원시 이미지를 한 번 캡처합니다.
버튼을 클릭하여 원시 이미지를 한 번 캡처합니다. -
원시 이미지와 프로파일을 서로 전환하려면 캡처 버튼 아래의 데이터 유형을 클릭하십시오.
-
원시 이미지: 레이저 라인의 밝기를 조정하는 데 사용됩니다.
-
프로파일: 프로파일의 완전성 등 프로파일 추출 결과를 확인하는 데 사용됩니다.
-
-
원시 이미지의 레이저 라인 밝기가 요구 사항을 충족하는지 확인합니다. 레이저 라인 중앙에 있는 픽셀의 그레이스케일 값은 200~255 범위에 있어야 합니다.
과하게 어두운 경우
휘도가 적당한 경우
과하게 밝은 경우
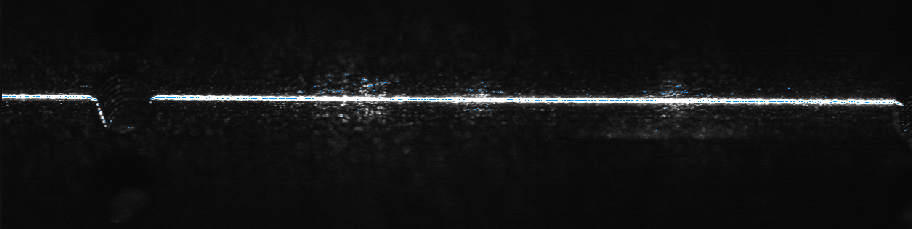
원시 이미지의 오른쪽 하단에서 커서가 위치한 픽셀의 그레이스케일 값을 확인할 수 있습니다. 표시되지 않으면 뷰의 이미지 정보 프레임을 선택하십시오.
-
레이저 라인의 밝기가 요구 사항을 충족할 수 없으면 오른쪽 파라미터 화면에서 다음 파라미터를 조정하십시오.
금속 블록은 단일 재료로 만들어집니다. 따라서 밝기 설정 범주에 속하는 노출 모드 파라미터의 값을 고정 노출로 설정하면 됩니다. 이때 노출 시간 파라미터를 조정함으로써 원시 이미지 중 레이저 라인의 밝기를 조절할 수 있습니다.
-
실제 레이저 라인의 밝기에 근거하여 노출 시간 파라미터를 조정해 주십시오.
-
레이저 라인이 과하게 어두우면 노출 시간 파라미터 값을 늘립니다.
-
레이저 라인이 과하게 어두우면 노출 시간 파라미터 값을 줄입니다.
-
-
원시 이미지를 다시 캡처하고 레이저 라인의 밝기를 확인합니다. 필요한 경우 레이저 라인의 밝기가 요구 사항을 충족할 때까지 파라미터를 계속 조정합니다.
대상 물체가 여러 재질로 만들어졌거나 여러 색상이 있는 경우 HDR 노출 모드를 사용할 수 있습니다. 상세한 설명은 노출 모드 내용을 참조하십시오.
-
-
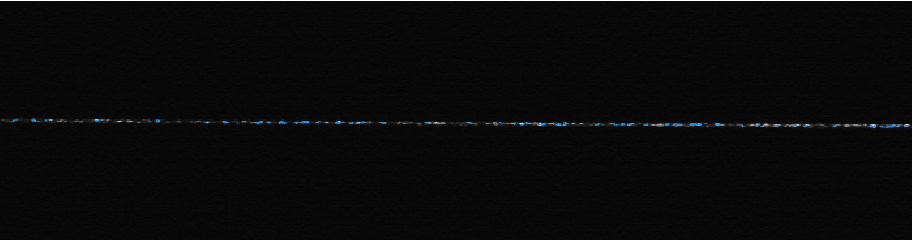
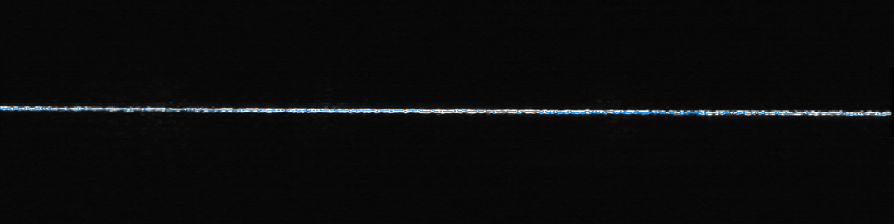
캡처 버튼 아래의 프로파일을 클릭하여 프로파일의 퀄리티를 확인합니다.
프로파일은 기본적으로 공백 없이 완전해야 합니다.
완전한 프로파일
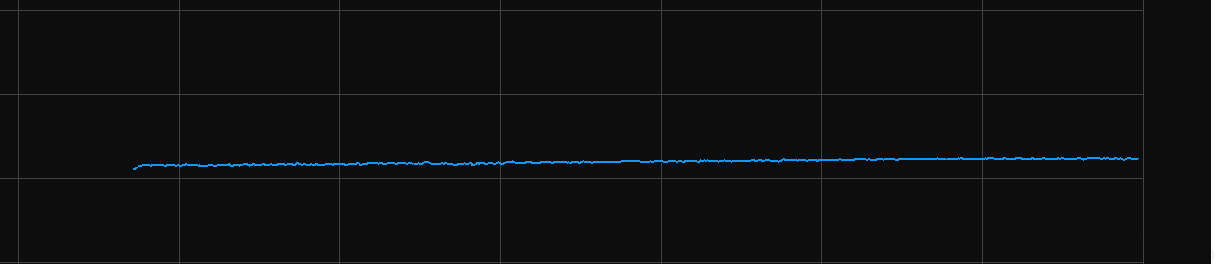
불완전한 프로파일
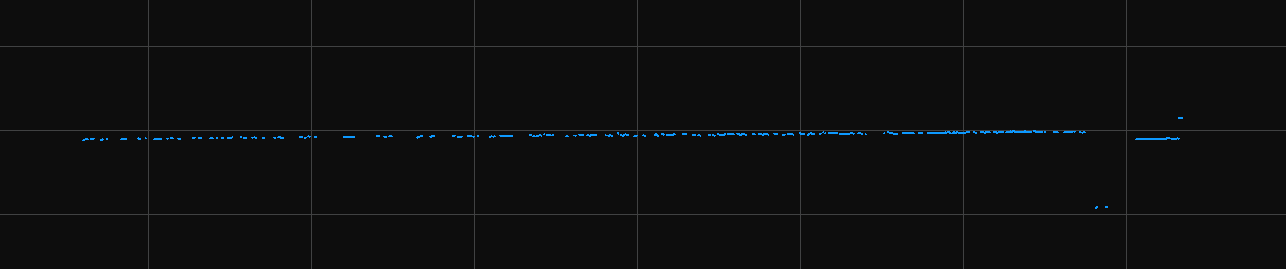
프로파일은 요구 사항을 충족할 수 없으면 원시 이미지 속의 레이저 라인의 밝기를 계속 조정해햐 합니다.
7.3. 광도 이미지, 뎁스 맵 및 포인트 클라우드 획득
프로파일 모드에서 획득한 프로파일은 광도 이미지, 뎁스 맵 및 포인트 클라우드가 생성되는 필수 조건입니다.
프로파일이 요구 사항을 충족한 후 다음 단계에 따라 광도 이미지, 뎁스 맵 및 포인트 클라우드를 획득합니다.
-
화면 오른쪽 상단에서 스캔 모드 버튼을 클릭하면 스캔 모드 화면으로 전환됩니다.
-
실제 응용 시나리오에 따라 스캔 과정을 트리거할 때 사용되는 파라미터를 조정합니다.
-
Mech-Eye Viewer가 데이터 획득을 트리거할 때 트리거 설정 범주에 속하는 데이터 획득 트리거 소스 파라미터의 값을 소프트웨어로 설정합니다.
-
각 라인의 스캐닝이 인코더에 의해 트리거되면 트리거 설정 범주에 속하는 라인 스캔 트리거 소스 파라미터의 값을 엔코더로 설정합니다.
-
대상 물체가 레이저 프로파일러를 기준으로 한 방향으로 이동할 때 엔코더의 실제 출력 신호를 기반으로 트리거 방향 파라미터의 값을 채널A 선행 또는 채널B 선행으로 설정합니다.
-
-
버튼을 클릭하여 레이저 프로파일러가 설정된 스캔 라인 수 값에 따라 현재 라운드의 데이터 획득을 완료하고 광도 이미지, 뎁스 맵과 포인트 클라우드를 생성합니다.
-
캡처 버튼 아래의 데이터 유형을 클릭하면 광도 이미지, 뎁스 맵 또는 포인트 클라우드를 확인할 수 있습니다.
이미지 캡처와 데이터 유형에 관한 더 상세한 정보는 데이터 획득 및 확인 내용을 참조하십시오. -
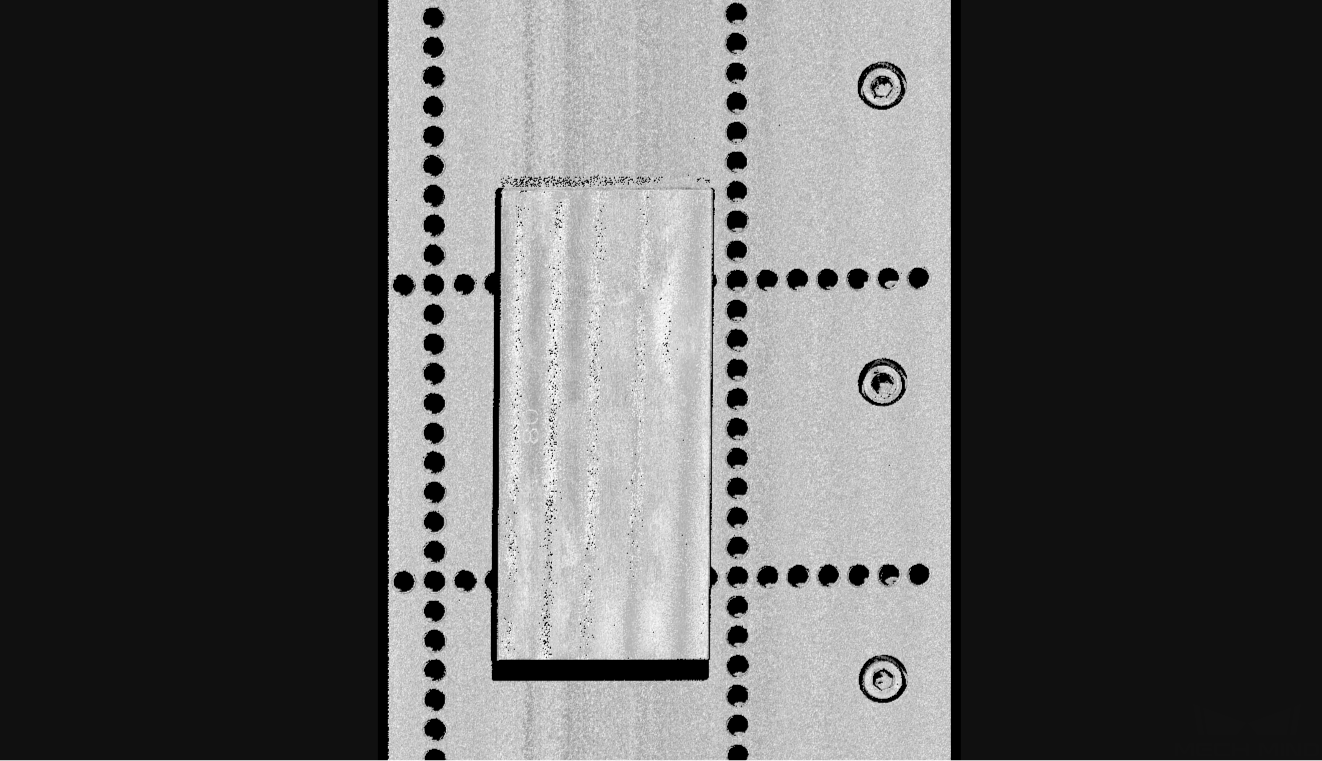
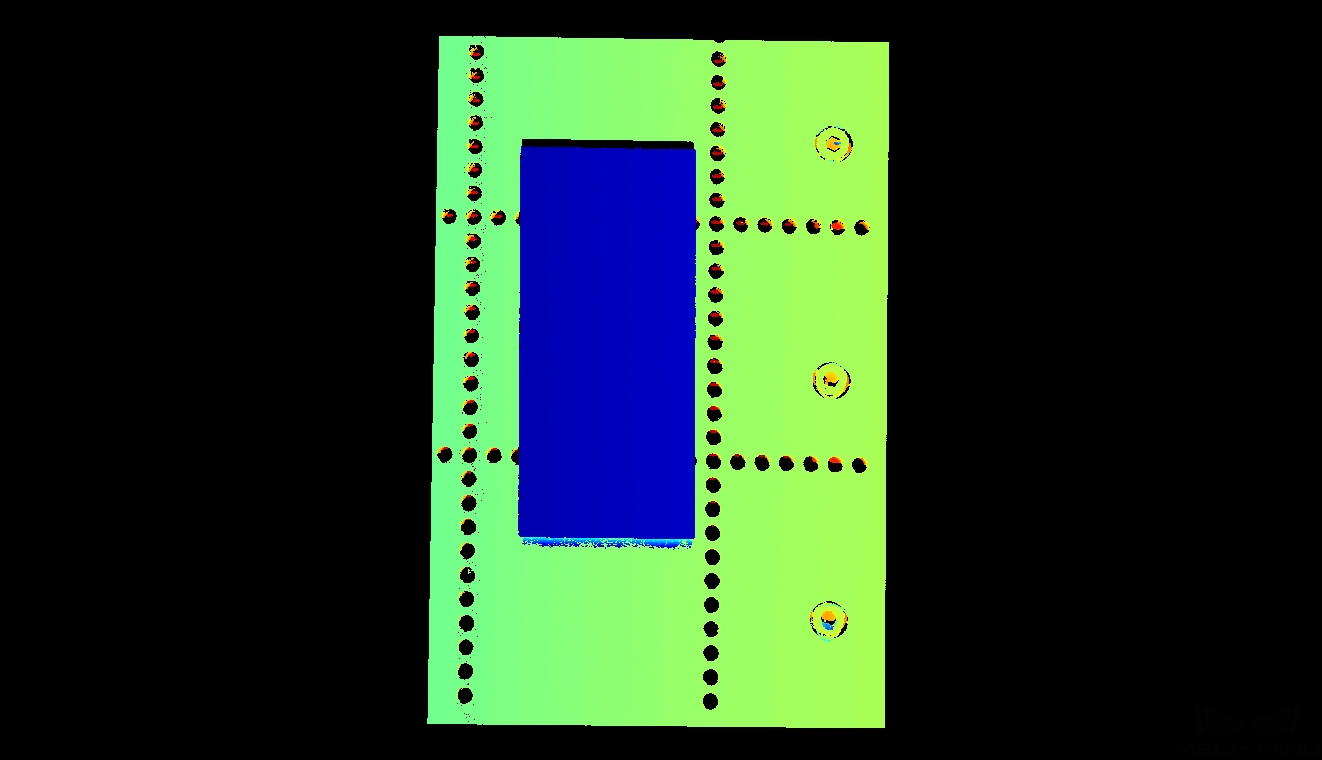
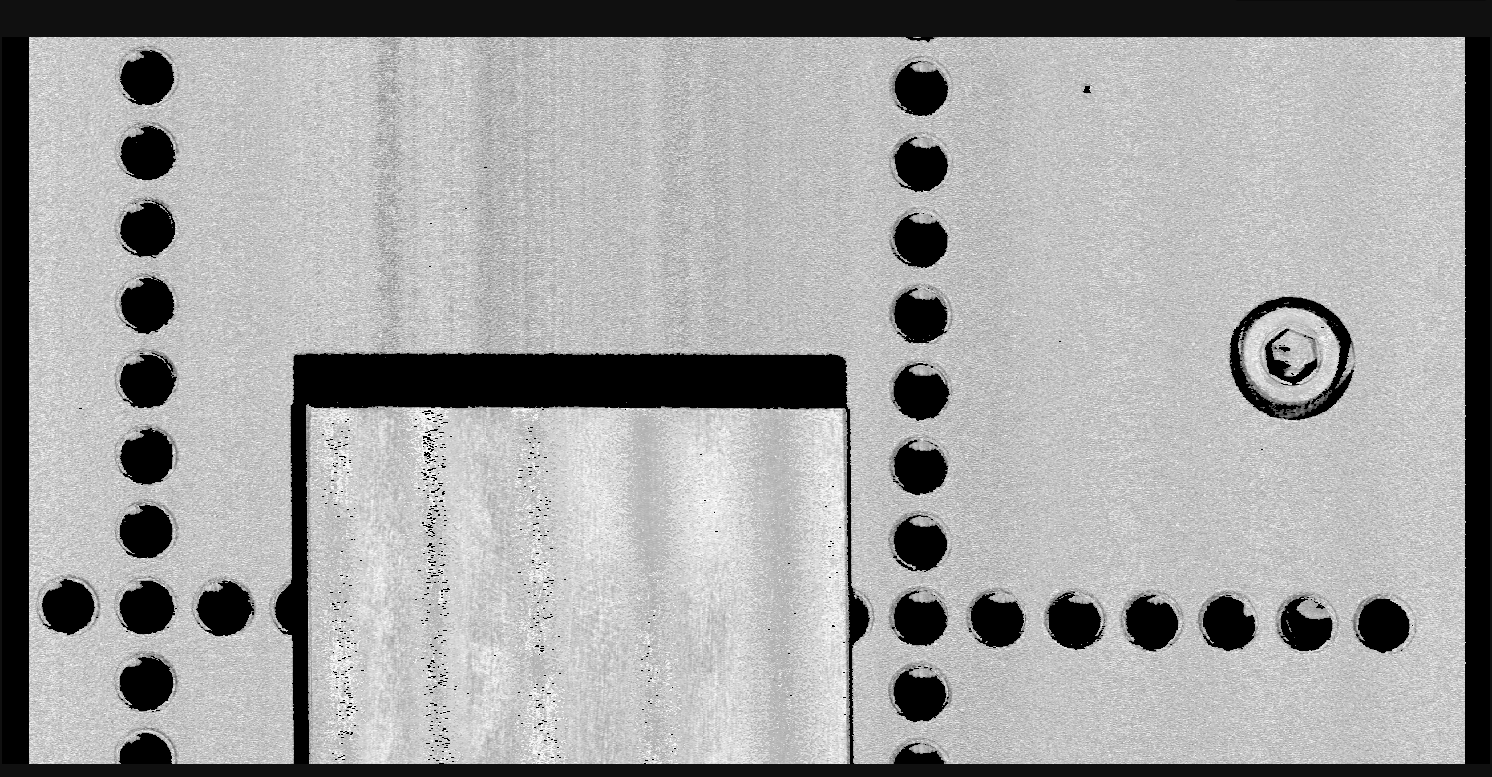
획득한 데이터의 퀄리티를 판단합니다.
광도 이미지, 뎁스 맵과 포인트 클라우드 중의 대상 물체에 해당하는 이미지는 완전해야 합니다. 데이터의 퀄리티를 판단할 때 아래 그림을 참조할 수 있습니다.
광도 이미지
뎁스 맵
포인트 클라우드

7.4. 파라미터 조정
획득한 데이터가 완전하지 않은 경우 다음 예를 참조하여 스캔 설정 범주에 속하는 스캔 라인 수 파라미터를 조정하십시오.
-
스캔 라인 수의 값을 2000으로 설정하고 데이터를 다시 획득하십시오. 광도 이미지의 퀄리티를 다시 확인하십시오. 이때 광도 이미지 중의 금속 블록이 완전하지 않습니다.
-
스캔된 금속 블록의 길이를 기반으로 추정하고 스캔 라인 수 파라미터의 값을 6000으로 설정한 다음에 데이터를 다시 획득하십시오. 광도 이미지의 퀄리티를 확인하십시오. 이때 광도 이미지 중의 금속 블록이 완전합니다.

|
이 시나리오에서는 스캔 데이터에 있는 대상 물체의 종횡비를 고려하지 않습니다. 스캔된 데이터에 있는 대상 물체의 종횡비가 실제 물체와 일치하도록 하려면 트리거 신호 계산 모드 및 트리거 간격 파라미터를 조정해야 합니다. |
8. 데이터 활용
Mech-Eye Viewer를 통해 얻은 광도 이미지, 뎁스 맵 및 포인트 클라우드는 직접 로컬에 저장하거나 Mech-Vision 또는 타사 머신 비전 소프트웨어를 사용하여 후속 처리 및 계산을 수행할 수 있습니다.
-
데이터 저장 : 이미지 캡처 영역의
 버튼을 클릭하여 저장 경로를 설정하고 저장할 데이터의 유형 선택한 후 저장 버튼을 클릭하십시오.
버튼을 클릭하여 저장 경로를 설정하고 저장할 데이터의 유형 선택한 후 저장 버튼을 클릭하십시오. -
Mech-Vision에서 데이터를 활용하기: Mech-Vision을 포함한 전체 비전 시스템 구축을 학습하기 위해 비전 시스템 튜토리얼 내용을 참조하십시오.
-
타사 머신 비전 소프트웨어에서 데이터를 활용하기: Mech-Eye API 또는 GenICam 인터페이스를 통해 레이저 프로파일러에서 획득한 데이터를 타사 소프트웨어로 전송할 수 있습니다.