풀 파렛트 시뮬레이터
파렛트가 가득 찼을 때 가장 높은 층이 전부 카메라의 시야 내에 있는지 확인하고 확인 결과에 따라 카메라의 설치 높이를 조정하는 데 사용됩니다.
|
사전 준비
풀 파렛트 시뮬레이터를 사용하기 전에, 다음과 같은 준비 작업을 수행하십시오.
-
파렛트가 가득 찼을 때 파렛트의 사리즈를 확인하십시오.
-
카메라 설치 위치에 최대 설치 높이와 같은 제한 조건이 있는지 확인하십시오.
-
파렛트를 준비하고 카메라 시야에 배치하십시오. 파렛트의 포인트 클라우드를 캡처하고 퀄리티를 확인하십시오.
-
파렛트 위치를 조정하여 파렛트 포인트 클라우드의 긴 쪽 및 짧은 쪽이 카메라 시야의 긴 쪽 및 짧은 쪽과 각각 평행하도록 합니다.
-
ROI를 설정하여 해당 파렛트에 해당하는 포인트 클라우드만 유지합니다.
작업 프로세스
-
를 클릭하여 풀 파렛트 시뮬레이터를 엽니다.
-
포인트 클라우드의 위치를 조정하여 측면에서 전체 포인트 클라우드를 볼 수 있도록 합니다.
-
직육면체를 만들기 버튼을 클릭하여 시뮬레이션 파렛트의 직사각형을 자동으로 만듭니다.
만들어진 직육면체는 회전할 수 없습니다. 직육면체의 변과 파렛트 포인트 클라우드의 변이 평행하지 않으면, 풀 파렛트 시뮬레이터를 종료하고 파렛트 위치를 조정하며 이미지를 다시 캡처하십시오. -
직육면체 사이즈에 파렛트가 가득 찼을 때 파렛트의 사이즈를 입력하십시오.
-
(선택 사항) 직육면체 위치 조정 : 직육면체의 바닥면이 파렛트 포인트 클라우드 위에 없으면 직육면체 바닥면의 중심 위치의 z 값을 조정하여 직육면체 바닥면이 파렛트 포인트 클라우드 위에 위치하도록 합니다.
z 값의 조정량을 기록하십시오. -
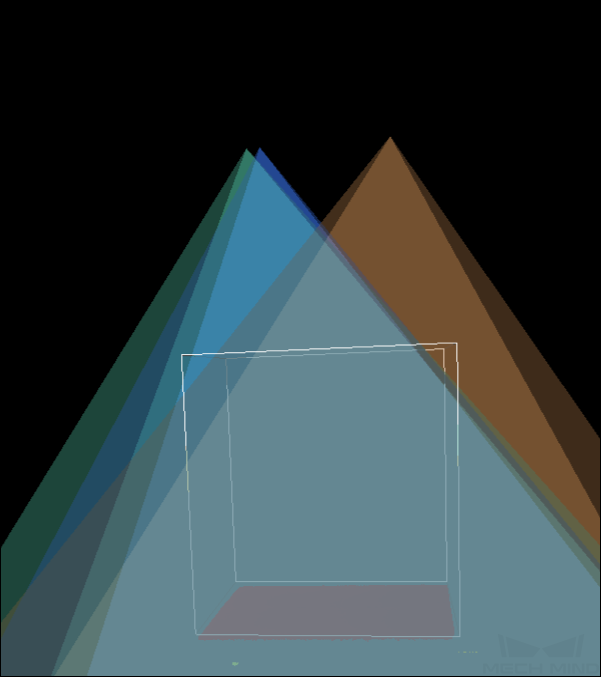
포인트 클라우드를 회전하여 직육면체 상단면이 각 절두체 뷰의 겹친 영역 내에 있는지 확인합니다. 예시는 다음과 같습니다.
직육면체 상단면이 각 절두체 뷰의 겹친 영역 내에 있음 직육면체 상단면이 각 절두체 뷰의 겹친 영역을 벗어남 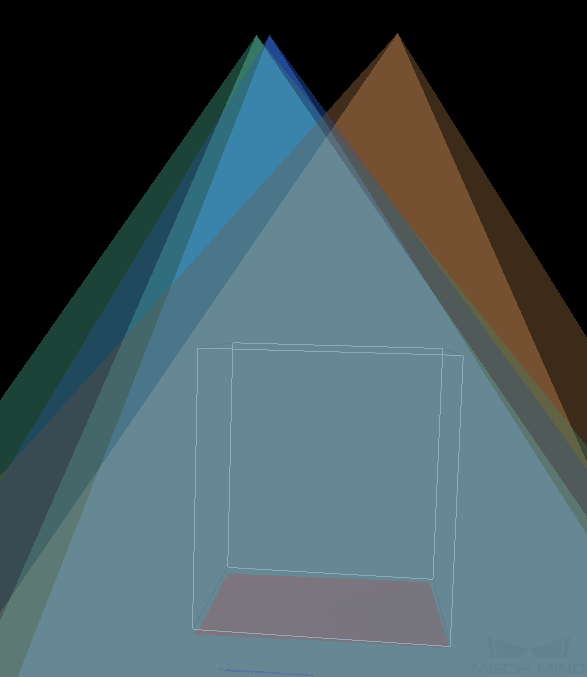
-
카메라의 설치 높이를 평가합니다.
-
직육면체 상단면이 각 절두체 뷰의 겹친 영역 내에 있으면 카메라의 설치 높이가 적절합니다.
-
직육면체 상단면이 각 절두체 뷰의 겹친 영역을 벗어나면 카메라의 설치 높이가 너무 낮습니다. 다음 단계를 확인하십시오.
-
-
직육면체 바닥면의 중심 위치의 z 값을 늘려 직육면체 상단면이 절두체 뷰의 겹친 영역 내에 완전히 위치하도록 합니다.
z 값의 조정량을 기록하십시오. -
카메라 설치 높이 조정량 계산 : 단계8의 z 값 조정량에서 단계5의 z 값 조정량을 빼면 카메라 설치 높이를 올려야 하는 양입니다.
| 풀 파렛트 시뮬레이터에서 변경 사항은 자동으로 저장되지 않으므로 z 값의 조정량을 기록해야 합니다. |