よくある課題
本節では高反射円盤ソリューションによくある課題と考えられる原因、対応策を紹介します。
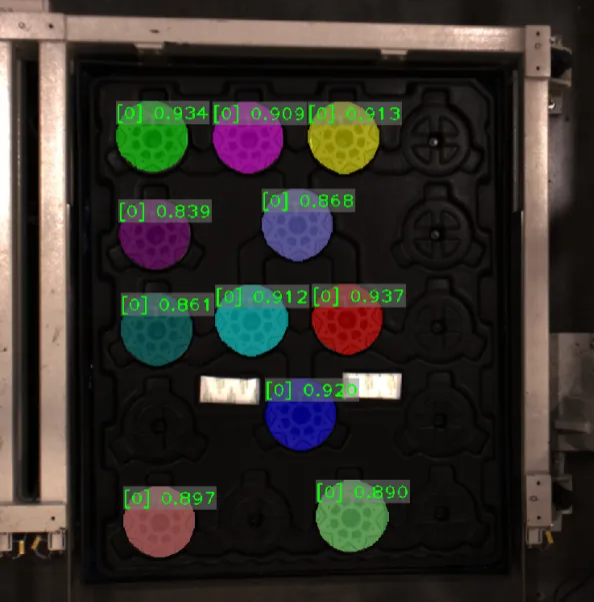
課題二:ワークの点群品質低下
解決法
-
Mech-Eye Viewer でカメラ露出のパラメータを調整してコーディングモードを反射に設定して完全な部品点群を取得します。カメラパラメータについてより詳細な説明は、LSR Lカメラパラメータをお読みください。
-
現場の光線を調整するか遮光装置を使用します。
課題三:ワーク認識の結果の間違い
解決法
-
点群品質の変動が激しい場合に、マッチングモードグループの高精度マッチングモードをサーフェスマッチングに設定します。
-
低精度マッチングの設定と高精度マッチングの設定グループの実行モードをいずれも高精度に設定し、かつ高精度マッチングの設定グループの偏差補正能力を低レベルに設定します。低精度マッチングの位置姿勢を調整またはフィルタリングの戦略を選択をX軸の向きを調整に設定し、X軸の向きを0°に設定します。これにより、マッチングで取得したワーク位置姿勢のX軸向きがワーク中心点のX方向が一致するようにして、把持の精度を確保できます。
-
ディープラーニングを使用してパレットとその他のシーンの物体点群の干渉をなくして認識効果を改善します。