Empezar a Usar el Perfilador Láser
Este capítulo presenta las operaciones que van desde revisar el contenido del paquete hasta adquirir datos mediante Mech-Eye Viewer.
|
Si nunca ha usado un perfilador láser, primero lea los siguientes capítulos para aprender las informaciones básicas sobre el perfilador láser:
|
1. Revisar el Contenido del Paquete
-
Una vez recibido el paquete, asegúrese de que está en buen estado y no presenta daños.
-
Asegúrese de que no hay daños o piezas faltantes de acuerdo con el Contenido del Paquete que se encuentra en el mismo paquete.
|
En este tutorial, se usa el sensor LNX-8030-GL y el controlador LNX-8000C-GL como ejemplo. La lista de abajo se indica solamente a título informativo. El Contenido del Paquete en el paquete puede ser diferente. |

2. Revisar los Puertos y las Luces Indicadoras
El perfilador láser consta de un sensor y un controlador. Las siguientes secciones presentan información sobre el sensor y el controlador del perfilador láser.
2.1. Sensor
Revise las funciones de cada parte del sensor de acuerdo con los diagramas de abajo.
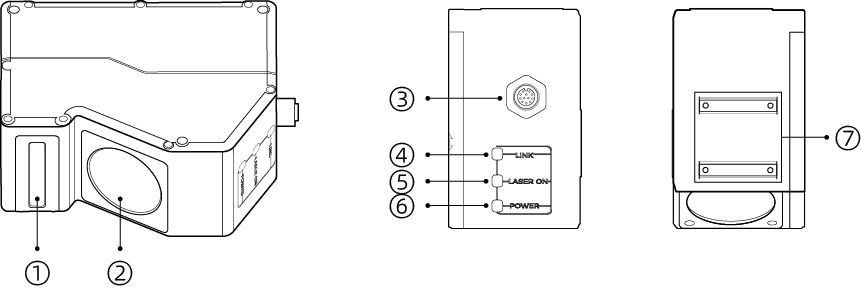
| N.º | Nombre | Función |
|---|---|---|
① |
Emisor láser |
Emite la luz láser. |
② |
Unidad fotosensible |
Recibe la luz láser reflejada por la superficie de destino. |
③ |
Puerto del controlador |
Sirve para conectar el controlador. Para obtener más información, consulte la sección Puerto del controlador. |
④ |
Luz indicadora de LINK |
Apagada: sin conexión a la red |
Verde intermitente: transmitiendo datos |
||
Amarillo intermitente: transmitiendo datos, pero la velocidad es inferior a la normal |
||
⑤ |
Luz indicadora de LASER ON |
Apagada: luz láser no emitida |
Encendida: luz láser emitiéndose |
||
⑥ |
Luz indicadora de POWER |
Apagada: sin conexión a la alimentación |
Verde fija: tensión normal |
||
⑦ |
Orificio de montaje de dispositivo de sombreado |
Sirve para montar el dispositivo de sombreado en el sensor. |
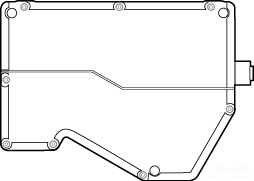
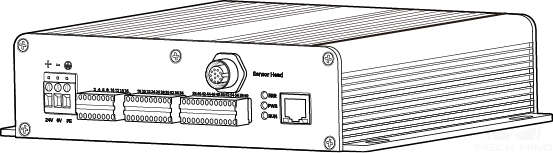
2.2. Controlador
Revise las funciones de cada parte y las luces indicadoras del controlador de acuerdo con los diagramas de abajo.
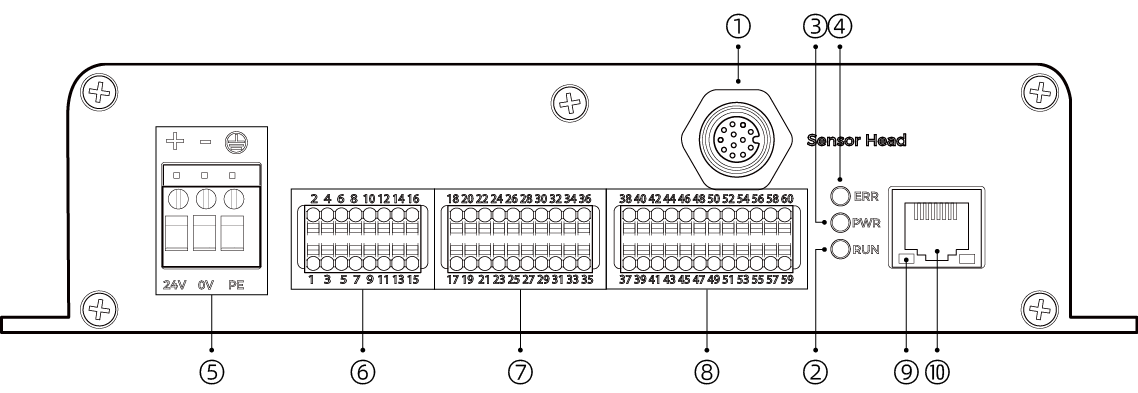
| N.º | Nombre | Función |
|---|---|---|
① |
Puerto del sensor |
Sirve para conectar el sensor. Para obtener más información, consulte la sección Puerto del sensor. |
② |
Luz indicadora de RUN |
Encendida: adquiriendo datos |
Apagada: sin adquirir datos |
||
③ |
Luz indicadora de PWR |
Verde fija: tensión normal |
Apagada: tensión anormal o no conectado a la alimentación |
||
④ |
Luz indicadora de ERR |
Intermitente: mal funcionamiento |
Apagada: funcionamiento normal |
||
⑤ |
Terminales de fuente de alimentación |
24 V: entrada de CC de +24 V |
0 V: entrada de CC de 0 V |
||
PE: conectado a tierra |
||
⑥ |
Terminal de Señal de Entrada |
Para obtener más información, consulte la sección Terminal de señal de entrada. |
⑦ |
Terminal de Señal de Salida |
Para obtener más información, consulte la sección Terminal de señal de salida. |
⑧ |
Terminal de Señal del Codificador |
Sirve para conectar el codificador. Para obtener más información, consulte la sección Terminal de señal del codificador. |
⑨ |
Luz indicadora de red |
Intermitente: transmitiendo datos |
Fija: sin trasmisión de datos |
||
⑩ |
Puerto Ethernet de RJ45 |
Sirve para conectar el conector de RJ45 del cable Ethernet. |
3. Montar y Conectar
|
3.1. Montar el Sensor
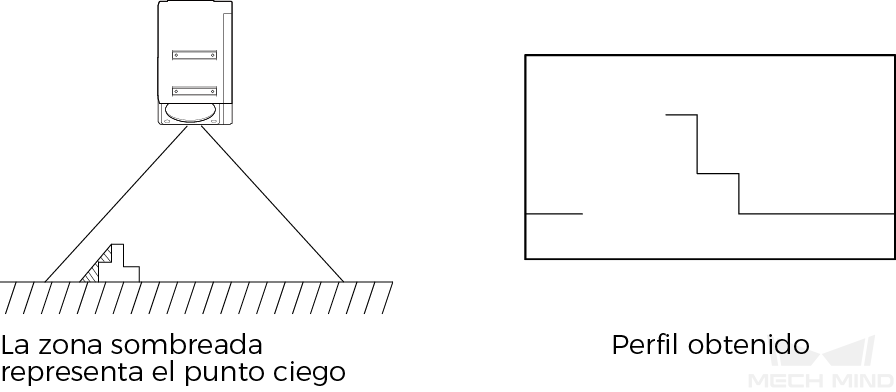
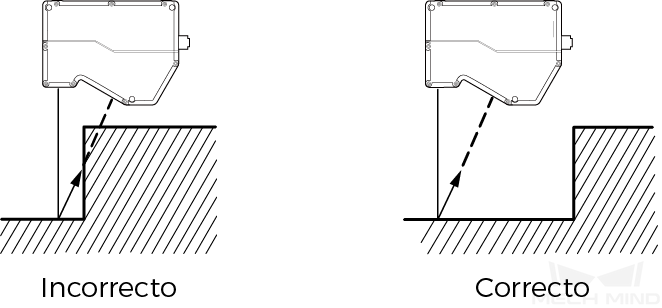
Antes del montaje, revise las siguientes precauciones:
-
La forma del objeto de destino puede producir puntos ciegos en el rango de medición. Evalúe el efecto de los puntos ciegos sobre el escaneo antes de montar el sensor. El láser de este producto se emite casi en paralelo, por lo que no suele producir puntos ciegos.
-
Asegúrese de que la luz láser reflejada por la superficie del objeto de destino no esté obstruida y pueda llegar a la unidad fotosensible.
-
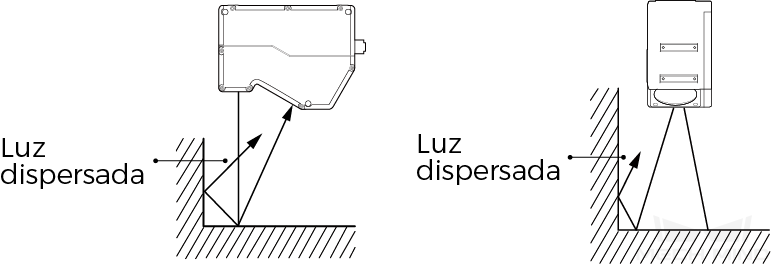
Se produce la luz dispersada si la luz láser se refleja en los objetos alrededores, como la pared. Evalúe el efecto de luz dispersa sobre el escaneo antes de montar el sensor.
-
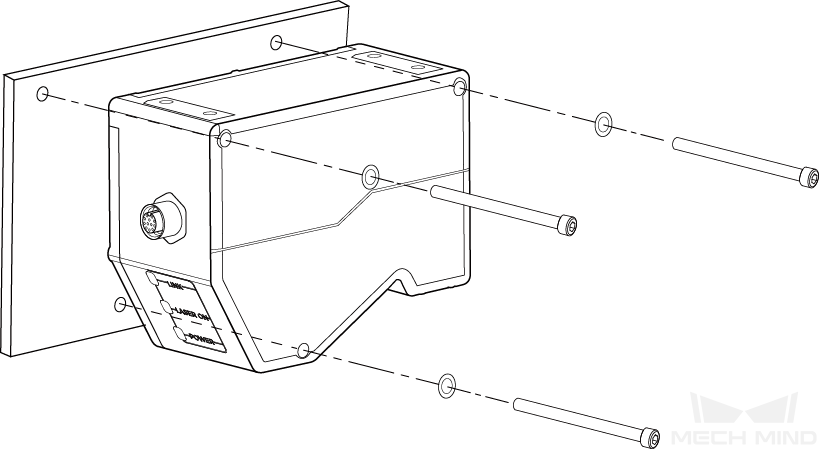
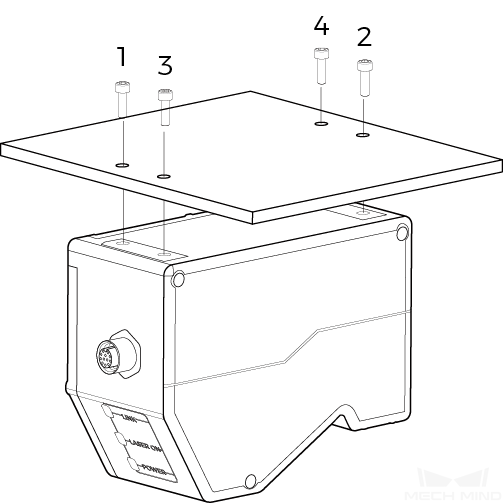
Para que el sensor disipe bien el calor, móntelo en una placa metálica y asegúrese de que el área de contacto de la placa de montaje y el aire sea al menos dos veces mayor que la superficie lateral del sensor.
Para obtener más información sobre los métodos de disipación, consulte el capítulo Métodos de Disipación para el Perfilador Láser.
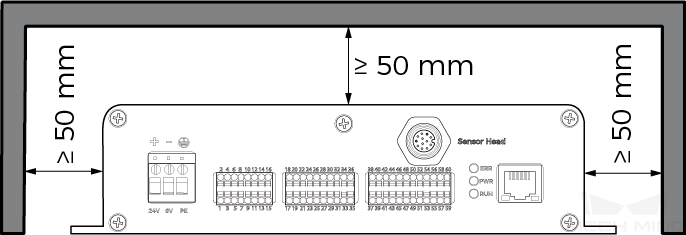
3.2. Montar el Controlador
Antes del montaje, revise las siguientes precauciones:
-
Deje al menos un espacio de 50 mm por encima del controlador y a ambos lados. Deje al menos un espacio de 90 mm frente al lateral donde se encuentran los puertos y terminales.
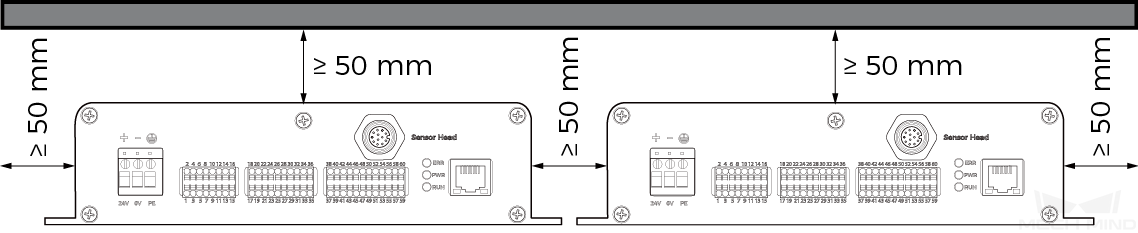
-
Para controladores montados uno al lado del otro, deje al menos un espacio de 50 mm entre ellos y por encima de ellos.
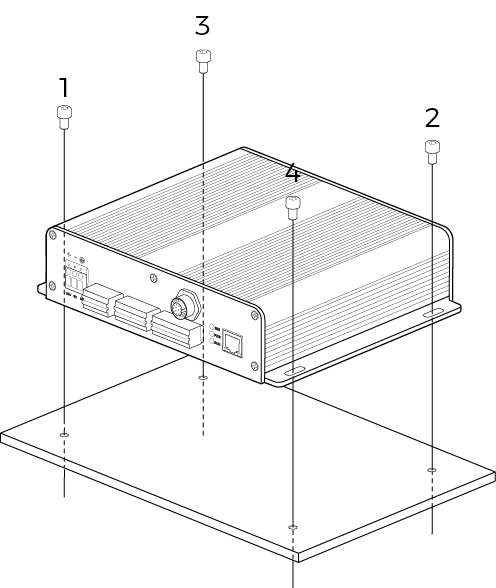
Como se muestra a continuación, coloque cuatro tornillos de M5 x 8, y apriete las tuercas con la llave con boca abierta.
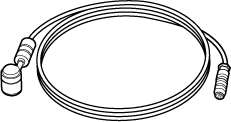
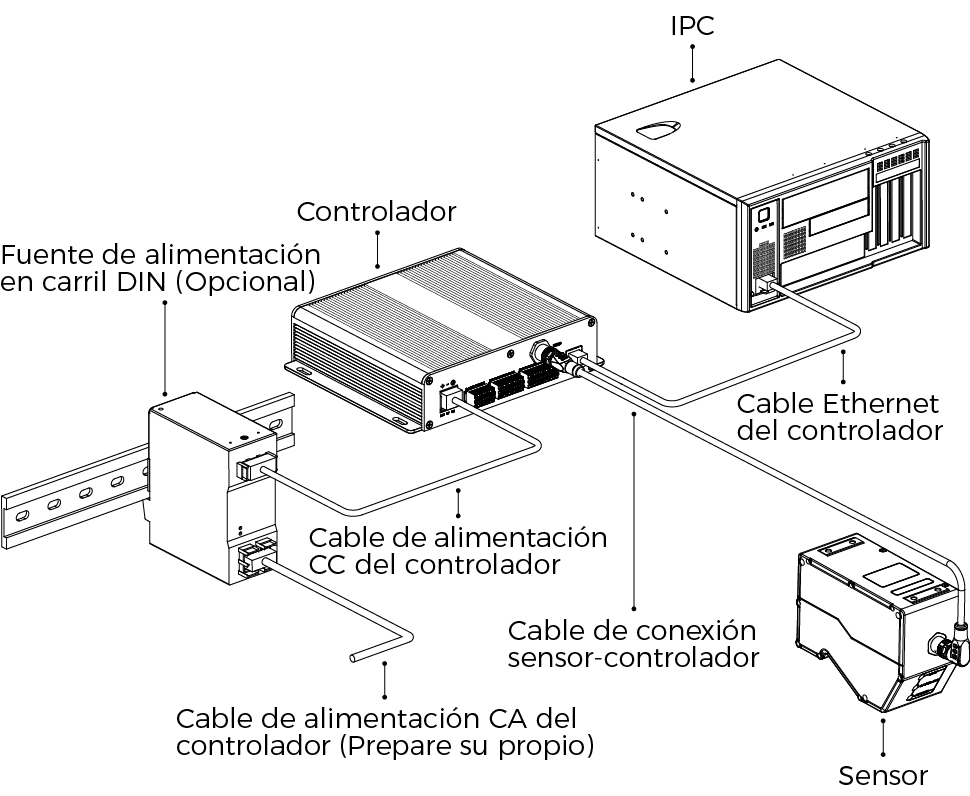
3.3. Conectar el Sensor y el Controlador
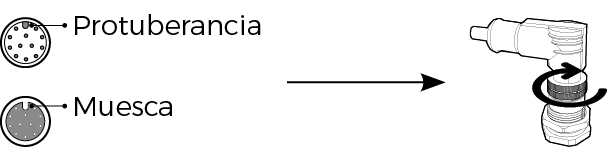
Inserte el conector en ángulo del cable de conexión de sensor-controlador en el puerto del controlador en el sensor, e inserte el conector recto en el puerto del sensor en el controlador.
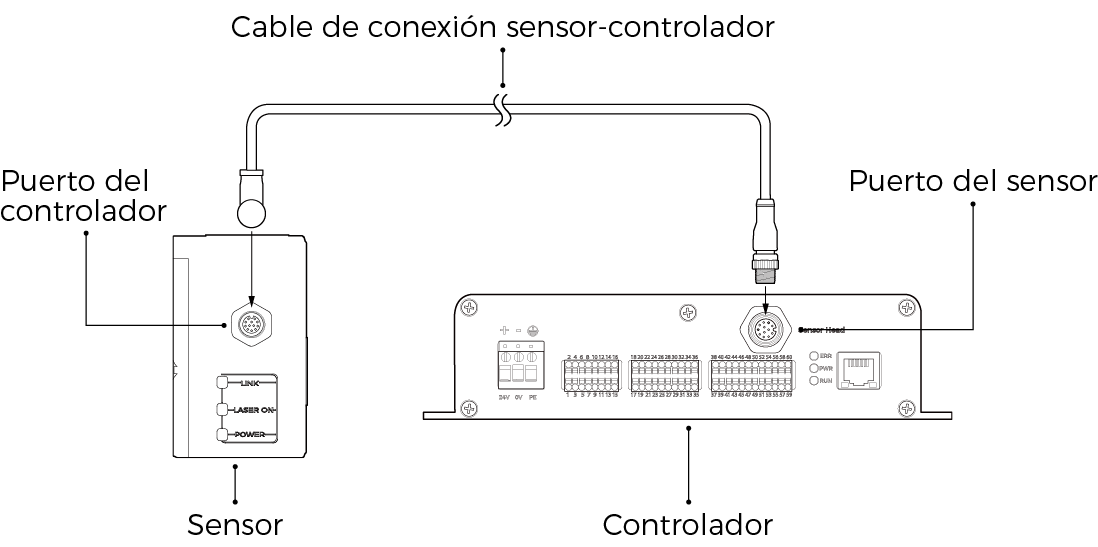
-
Al insertar los conectadores del cable de conexión de sensor-controlador, alinee la protuberancia del conector con la muesca del puerto.
-
Apriete la tuerca. La torsión de apriete recomendada para los tornillos es de 0,7 N·m. Queda un hueco de unos 2 mm después de apretar la tuerca completamente.
|
Sujete los cables adecuadamente para evitar dañar los cables o conectores debido a la tensión. |
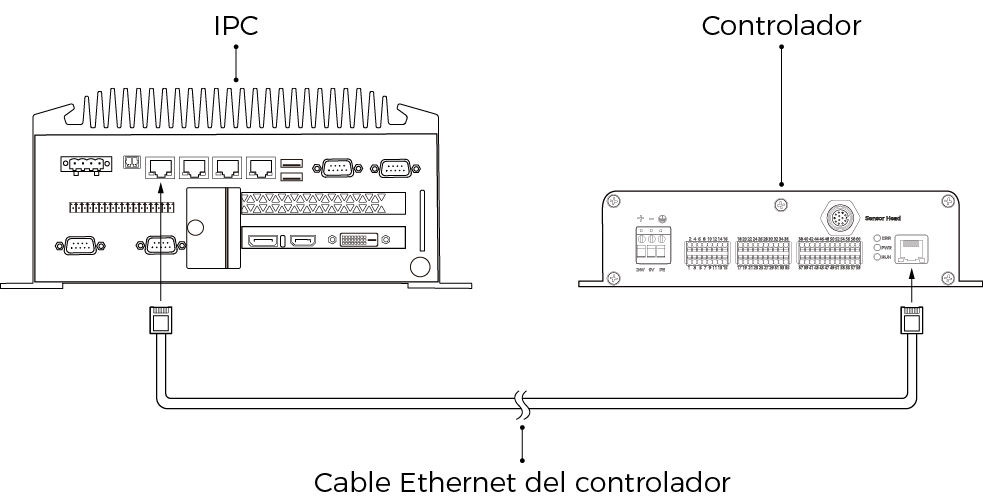
3.4. Conectar el Controlador e IPC
Inserte un extremo del cable Ethernet del controlador en el puerto Ethernet RJ45 del controlador, y el otro extremo en el puerto Ethernet RJ45 de la IPC.
|
3.5. Conectar el Controlador y la Fuente de Alimentación en Carril DIN
|
3.5.1. Conectar el Cable de Alimentación CC del Controlador y el Controlador
-
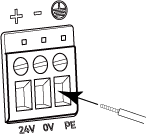
Use el destornillador plano para aflojar los tornillos sobre los terminales de alimentación en el controlador.
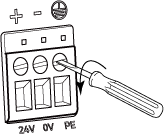
-
Inserte el alambre con signo +V en el terminal de 24 V, el alambre son signo -V en el terminal de 0 V, el alambre con signo PE en el terminal de PE (
 ).
).
-
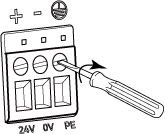
Use el destornillador plano para apretar los tornillos sobre los terminales. La torsión de apriete recomendada es de 0,2 N·m.
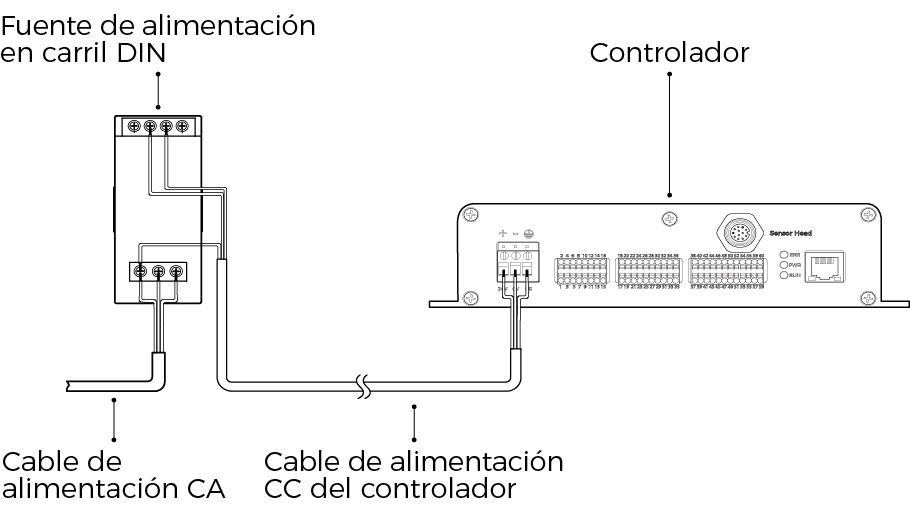
3.5.2. Conectar el Cable y la Fuente de Alimentación en Carril DIN
-
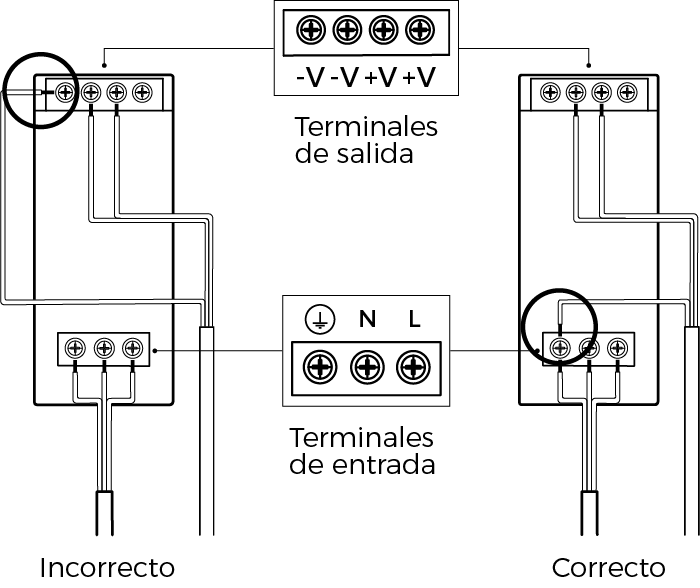
Use el destornillador plano para aflojar los tornillos sobre los terminales de la fuente de alimentación en Carril DIN.
-
Conecte el cable de alimentación CC del controlador: Inserte el alambre con signo +V en el terminal de salida con signo +V, el alambre -V en el terminal de salida con signos -V, y el alambre con signo PE en el terminal de tierra (
). -
Conecte el cable de alimentación CA: Inserte el cable de corriente en el terminal de salida L, el cable neutro en el terminal de salida N y el cable de tierra en el terminal de tierra (
). -
Use el destornillador plano para apretar los tornillos en los terminales.
|
3.6. Conectar el Controlador y un Dispositivo Externo
Puede conectar dispositivos externos, como un PLC y un codificador, a los terminales correspondientes del controlador, con conectar el perfilador láser para la adquisición de datos, o proporcionar las señales de estado de adquisición de datos para un dispositivo externo.
Si es necesario conectar un dispositivo externo, consulte los siguientes capítulos para revisar los dispositivos y terminales de señal por conectar:
Al confirmar los terminales por conectar, siga los siguientes pasos para insertar los alambres a los terminales correspondientes del controlador:
-
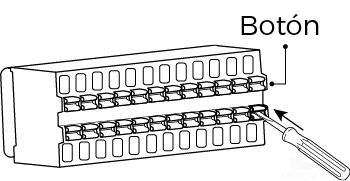
Seleccione el terminal donde inserte el alambre, y use el destornillador plano para presionar hacia abajo el botón encima/abajo.
-
Inserte el alambre en el terminal y retire el destornillador plano.
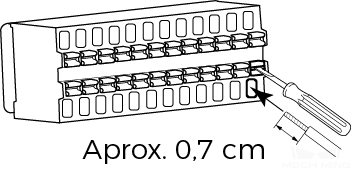
-
La parte expuesta del alambra (sin descubrimiento) debe ser aproximadamente de 0,7 cm. Si la parte expuesta es demasiado corta, la conexión puede fallar.
-
Si los hilos del cable están sueltos, júntelos e insértelos en el terminal.
-
-
Tire suavemente el alambre. El alambre no debe salir si está correctamente insertado. Si el alambre sale, inserte de nuevo.
No tire el alambre con fuerza. Hacer eso puede tirar del alambre de forma brusca y dañar la parte expuesta.
Si desea tirar del alambre, presione el botón encima/debajo del terminal con el destornillador plano y tire del alambre.
El montaje y la conexión del hardware del perfilador láser ya han finalizado. Las siguientes secciones describen cómo usar Mech-Eye Viewer para conectar el perfilador láser y adquirir datos.
4. Descargar e instalar la última versión de Mech-Eye SDK
Descargue el paquete de instalación de Mech-Eye SDK en el Área de Descargas de Mech-Mind.
Después de descomprimir el paquete de instalación, haga doble clic en el instalador para instalar Mech-Eye SDK. Para obtener más información sobre la descarga, instalación, actualización y desinstalación de Mech-Eye SDK, consulte el capítulo Manual de Instalación de Mech-Eye SDK.
5. Ajustar la Dirección IP
Antes de conectar el perfilador láser, asegúrese de que las dos direcciones IP sean únicas y estén en la misma subred.
-
Dirección IP del perfilador láser
-
Dirección IP del puerto de Ethernet de la computadora conectado al perfilador láser
Abajo están los ajustes predeterminados de la dirección IP del perfilador láser:
Método de asignación de direcciones IP |
Estática |
|---|---|
Dirección IP |
192.168.23.203 |
Máscara de subred |
255.255.255.0 |
Puerta de enlace |
0.0.0.0 |
Siga los siguientes pasos para ajustar la dirección IP del perfilador láser:
-
Haga doble clic para abrir Mech-Eye Viewer.
-
Seleccione el perfilador láser por conectar, y haga clic en
 .
.
6. Conectar el Perfilador Láser
-
Seleccione el perfilador láser por conectar en Mech-Eye Viewer, y haga clic en el botón Conectar.
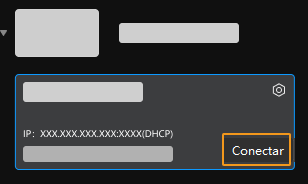
|
Si el software o firmware se necesita actualizar, se visualiza el botón Actualizar en su lugar. Haga clic en este botón para realizar la actualización primero, y conecte el perfilador láser. |
7. Adquirir Datos
El perfilador láser adquiere datos escaneando el objeto línea por línea. Se adquiere una imagen sin procesar al escanear una línea. Un punto de extracción representa datos extraídos de cada columna de píxeles en la imagen sin procesar. El perfil está compuesto por estos puntos de extracción. Al final, se adquieren la imagen de intensidad, el mapa de profundidad y la nube de puntos combinando los perfiles.
Mech-Eye Viewer proporciona dos modos de datos:
-
Modo de Perfil: Ajusta los parámetro relevantes al perfil para obtener los perfiles que cumplan los requisitos.
-
Modo de Escaneo: Ajusta los parámetro relevantes a las imágenes y nube de puntos para obtener la imagen de intensidad, el mapa de profundidad y la nube de puntos que cumplan los requisitos.
7.1. Escenario de Ejemplo
El siguiente contenido se basa en el siguiente escenario de ejemplo:
-
La adquisición de datos se activa por Mech-Eye Viewer.
-
El escaneo de cada línea se activa por el codificador.
-
El objeto de destino se mueve en una dirección relativa al perfilador láser.
-
El objeto de destino es un bloque de metal con dimensiones aproximadas de 80 × 35 × 8 mm.
7.2. Obtener el Perfil
Siga los siguientes pasos para obtener los perfil que cumplan los requisitos:
-
Haga clic en
 para adquirir la imagen sin procesar de una vez.
para adquirir la imagen sin procesar de una vez. -
Haga clic en los tipos de datos debajo del botón adquirir para cambiar entre la imagen sin procesar y el perfil.
-
Imagen sin procesar: Sirve para ajustar el brillo de la línea láser.
-
Perfil: Sirve para revisar el efecto de extracción del perfil, como huecos del perfil.
-
-
Revise si el brillo de la línea láser en la imagen sin procesar cumple el requisito: El valor de escala de grises del centro de la línea láser debe estar en el rango de 200 a 255.
Demasiado oscura
Adecuada
Demasiado brillante
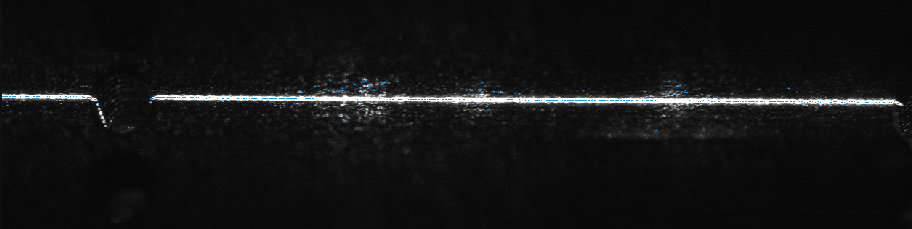
Puede ver el valor de escala de grises donde está el cursor en la parte inferior derecha de la imagen sin procesar. Si no se visualiza, marque la opción de Caja de Información de Imagen en el menú Ver.
-
Si el brillo de la línea láser no cumple el requisito, ajuste los siguientes parámetros en la pestaña de Parámetros ubicada a la derecha.
El bloque de metal es objeto de una sola textura. Entonces, seleccione Fija para el parámetro Modo de Exposición en la categoría de Ajustes de Brillo. Ahora, al ajustar el parámetro Tiempo de Exposición, se modificará el brillo de la línea láser en la imagen sin procesar.
-
Ajuste el parámetro Tiempo de Exposición de acuerdo con el brillo de la línea láser.
-
Si la línea láser es demasiado oscura, aumente el parámetro Tiempo de Exposición.
-
Si la línea láser es demasiado brillante, reduzca el parámetro Tiempo de Exposición.
-
-
Adquiera de nuevo la imagen sin procesar para revisar el brillos de la línea láser. En caso necesario, siga ajustando el parámetro hasta que el perfil cumpla el requisito.
Si el objeto de destino tiene varias texturas o colores, use el modo de exposición HDR. Para obtener más información, consulte la sección Modo de Exposición.
-
-
Haga clic en Perfil debajo del botón adquirir para revisar la calidad del perfil.
El perfil debe ser completo y no presentar huecos.
Perfil completo
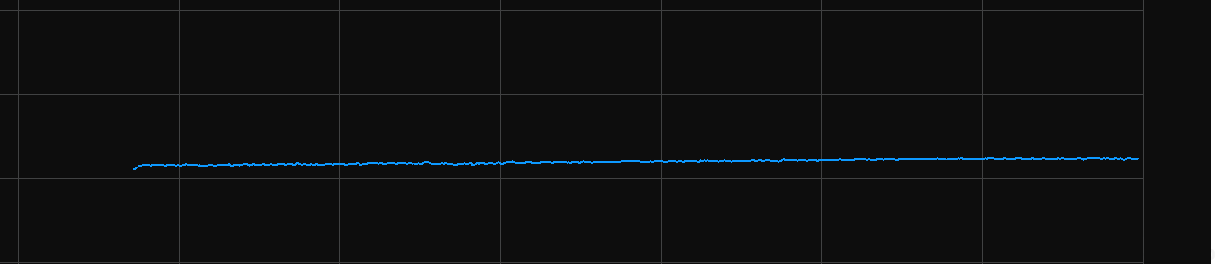
Perfil incompleto
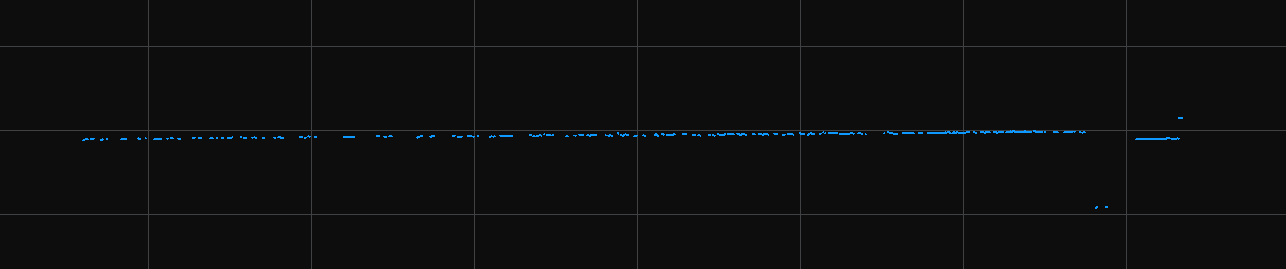
Si el perfil no cumple el requisito, siga ajustando el brillo de la línea láser en la imagen sin procesar.
7.3. Obtener Imagen de Intensidad, Mapa de Profundidad y Nube de Puntos
El perfil obtenido en el modo de perfil es la base para generar la imagen de intensidad, el mapa de profundidad y la nube de puntos.
Al asegurarse de que el perfil cumple el requisito, siga los siguientes pasos para obtener una imagen de intensidad, un mapa de profundidad y una nube de puntos.
-
Haga clic en el botón Modo de Escaneo ubicado en la parte superior derecha para cambiar al modo de escaneo.
-
Ajuste los parámetros relativos al disparo del escaneo según la escenario real:
-
Para obtener una imagen de intensidad y un mapa de profundidad, ajuste el Método de Adquisición de Datos en la categoría de Ajustes de Disparo a Frame-Based.
-
Cuando la adquisición se activa por Mech-Eye Viewer, cambie el parámetro Fuente de Disparo de Adquisición de Datos en la categoría de Ajustes de Disparo a Software.
-
Cuando el escaneo de cada línea se activa por el codificador, cambie el parámetro Fuente de Disparo de Adquisición de Datos en la categoría de Ajustes de Disparo a Codificador.
-
Cuando el objeto de destino se mueve en una dirección relativa al perfilador láser, cambie el parámetro Dirección de Disparo a Canal A adelante o Canal B adelante de acuerdo con las señales reales de salida del codificador.
-
-
Haga clic en
. El perfilador láser completará la ronda actual de adquisición de datos según el valor establecido del parámetro Número de Línea de Escaneo, y generará la imagen de intensidad, el mapa de profundidad y la nube de puntos. -
Haga clic en los tipos de datos debajo del botón adquirir para ver la imagen de intensidad, el mapa de profundidad y la nube de puntos.
Para obtener más información sobre la adquisición de datos y los tipos de datos, consulte el capítulo Adquirir y Revisar Datos. -
Revise la calidad de los datos.
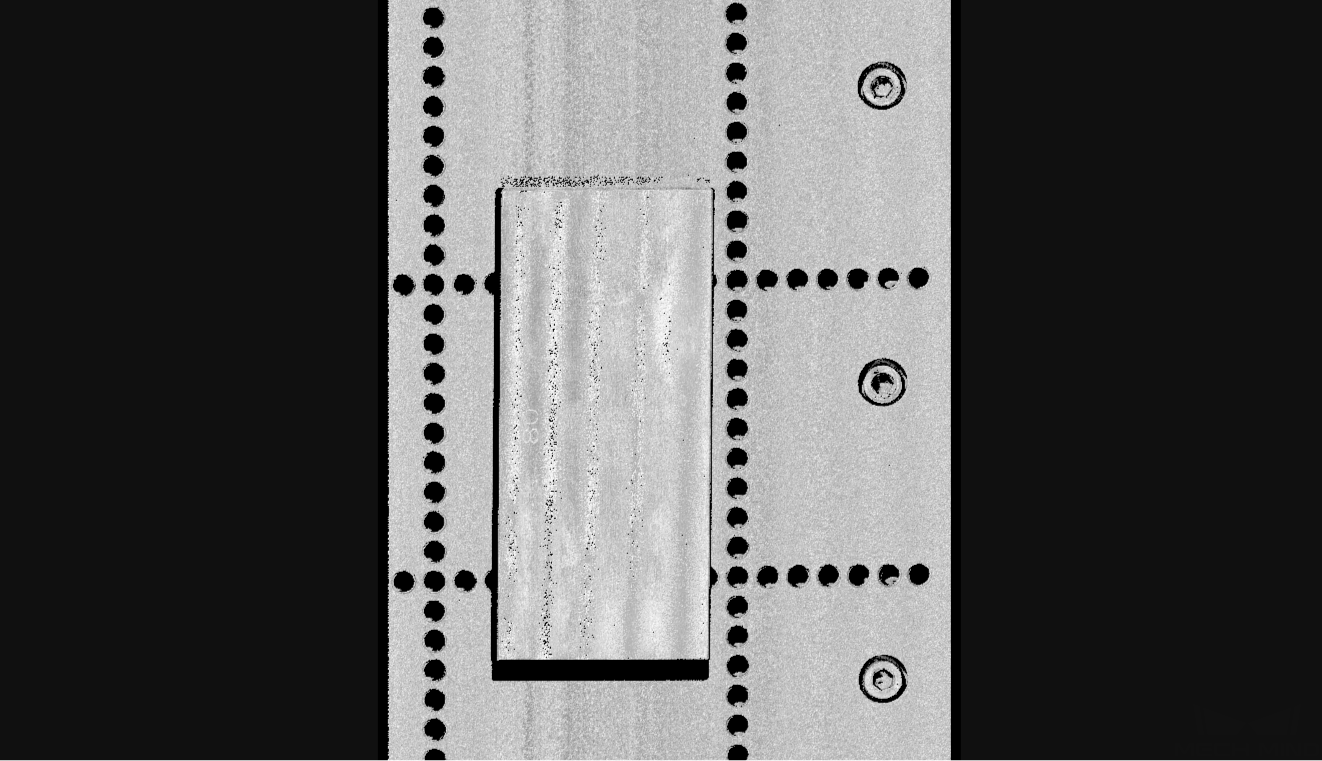
En la imagen de intensidad, la mapa de profundidad y la nube de puntos, los datos correspondientes al objeto de destino deben ser completos. Consulte la siguiente tabla que proporciona ejemplos de datos de buena calidad.
Imagen de intensidad
Mapa de profundidad
Nube de puntos
7.4. Ajustar los Parámetros
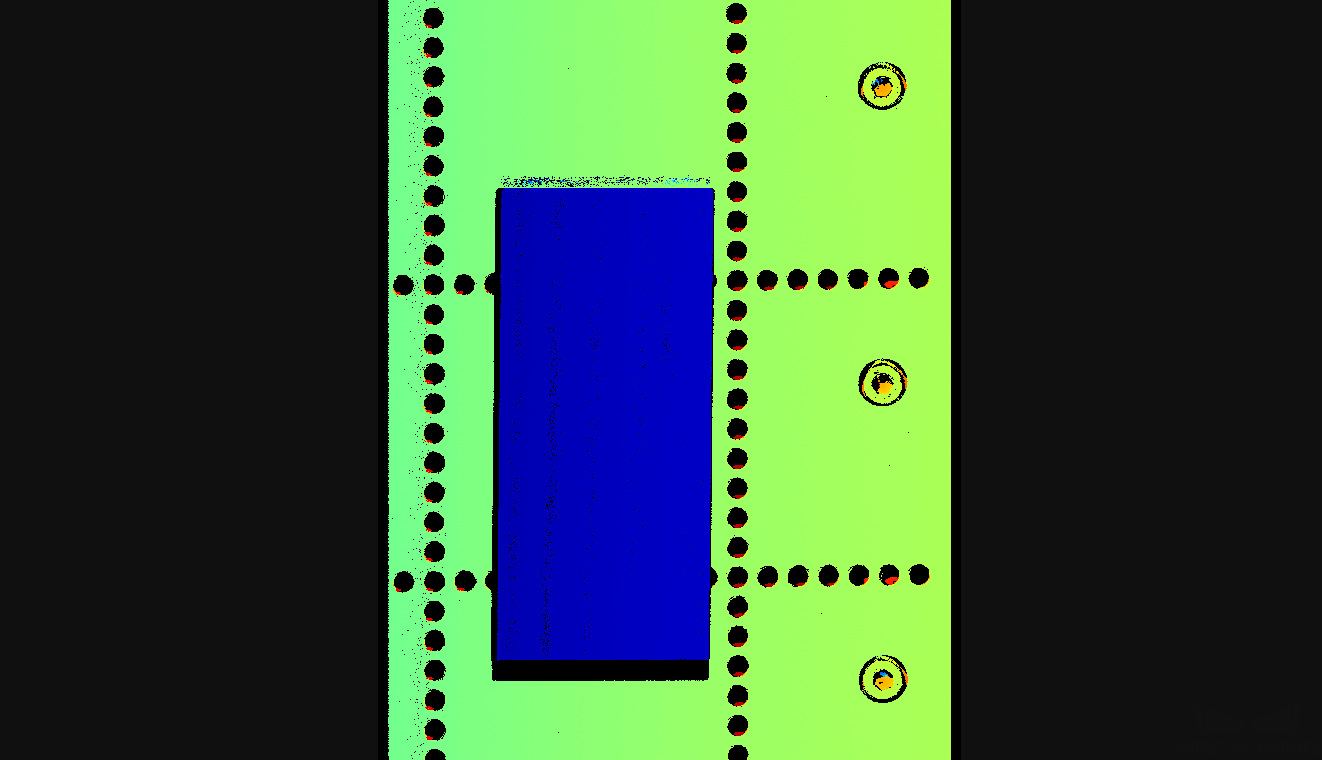
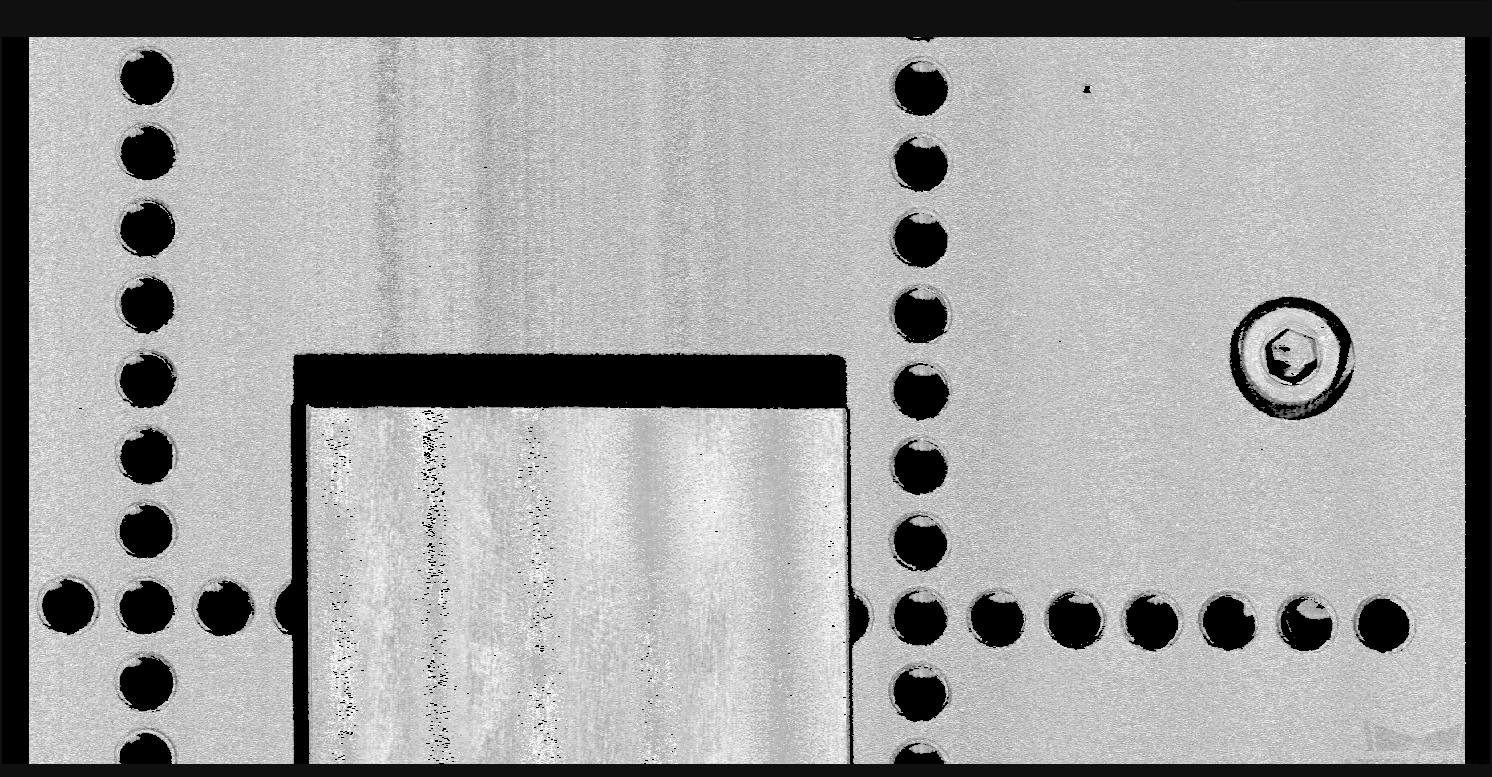
Si los datos obtenidos no son completos, consulte el siguiente ejemplo y ajuste el parámetro Número de Línea de Escaneo en la categoría de Ajustes de escanear:
-
Ajuste el parámetro Número de Línea de Escaneo a 2.000 y adquiera datos de nuevo. Revise la imagen de intensidad. El bloque de metal en la imagen de intensidad no es completo.
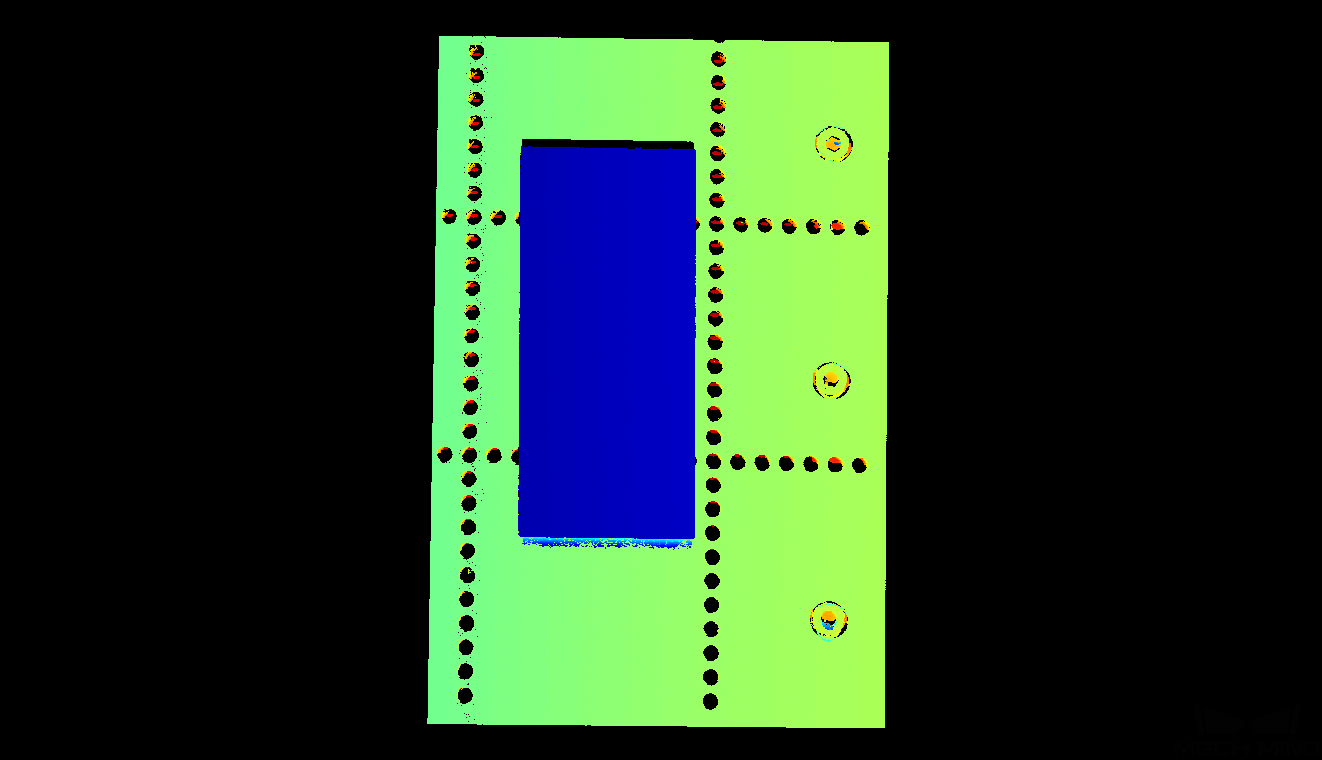
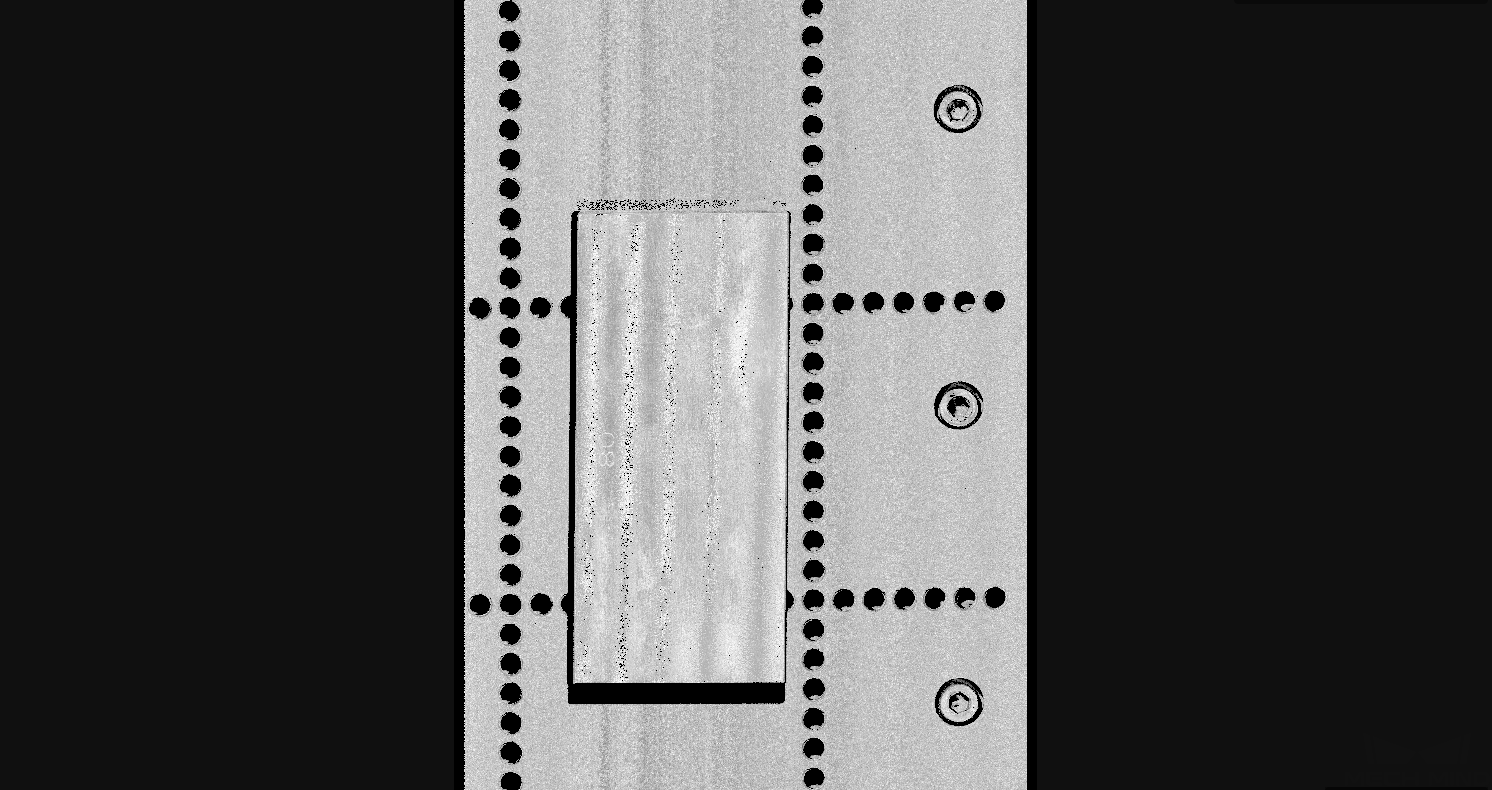
-
Según las proporciones del bloque de metal escaneado, estime y ajuste el valor del parámetro Número de Línea de Escaneo a 6.000, y adquiera datos de nuevo. Revise la imagen de intensidad. Ahora, el bloque de metal en la imagen de intensidad es completo.
|
En este escenario no se tiene en cuenta la relación de aspecto del objeto de destino en los datos escaneados. Si es necesario garantizar que la relación de aspecto del objeto de destino en los datos escaneados corresponda al del objeto de destino real, es necesario ajustar los parámetros Modo de Número de Señal de Disparo e Intervalo de Disparo. |
8. Usar Datos
Puede guardar la imagen de intensidad, el mapa de profundidad y la nube de puntos obtenidos por Mech-Eye Viewer en su computadora, o usarlos para el procesamiento y cálculo posteriores mediante Mech-MSR o software de visión artificial de terceros.
-
Guarde los datos: Haga clic en
 de panel de adquisición de datos para ajustar la ruta para guardar datos, marque el tipo de datos y haga clic en el botón Guardar.
de panel de adquisición de datos para ajustar la ruta para guardar datos, marque el tipo de datos y haga clic en el botón Guardar. -
Use los datos en Mech-MSR: Consulte el capítuloTutorial del Medición e Inspección 3D para aprender a crear un sistema completo de medición e inspección 3D que incluya Mech-MSR.
-
Use los datos en software de visión artificial de terceros: Puede transmitir los datos adquiridos por el perfilador láser a software de terceros mediante Mech-Eye API o puerto de GenICam.