Procedimiento de Calibración
En la producción industrial, se pueden implementar múltiples perfiladores láser al mismo tiempo para escanear el objeto de destino, ampliando así el campo de visión y eliminando los puntos ciegos visuales. Es necesario calibrar múltiples perfiladores láser antes de escanear un mismo objeto de destino. El procedimiento de calibración incluye la colocación del objeto de calibración y los perfiladores láser, el ajuste de parámetros y la calibración.
Colocar el Objeto de Calibración y los Perfiladores Láser
Siga los siguientes pasos preparativos para la calibración.
-
Coloque el objeto de calibración y los perfiladores láser y asegúrese de que:
-
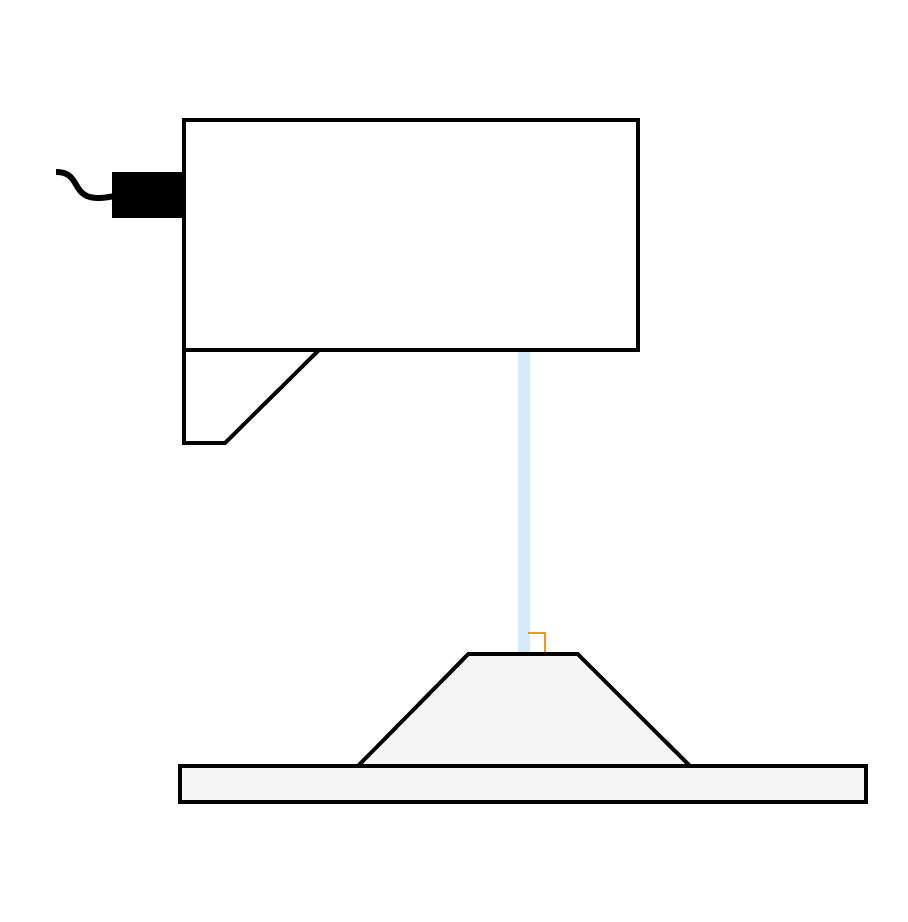
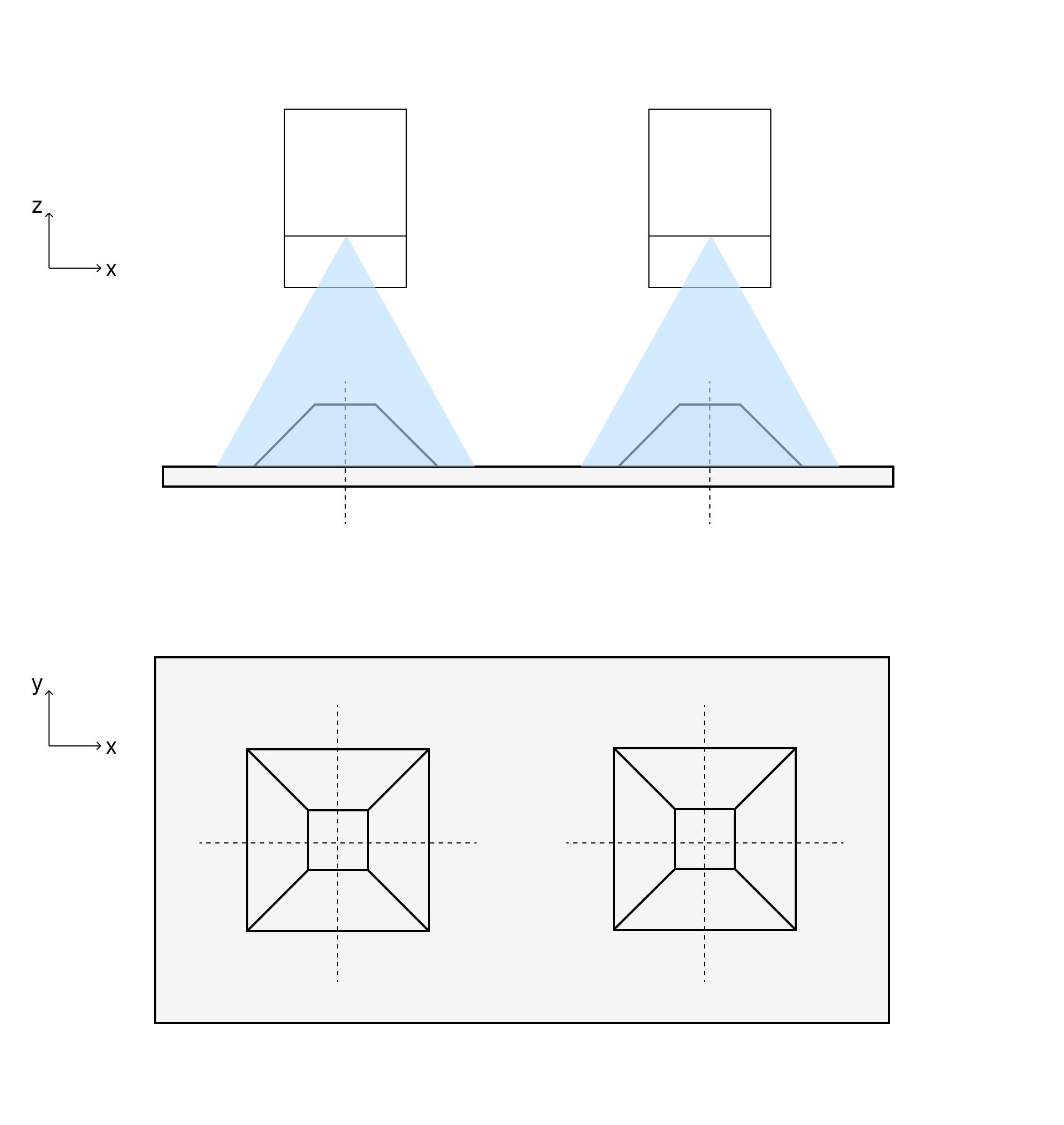
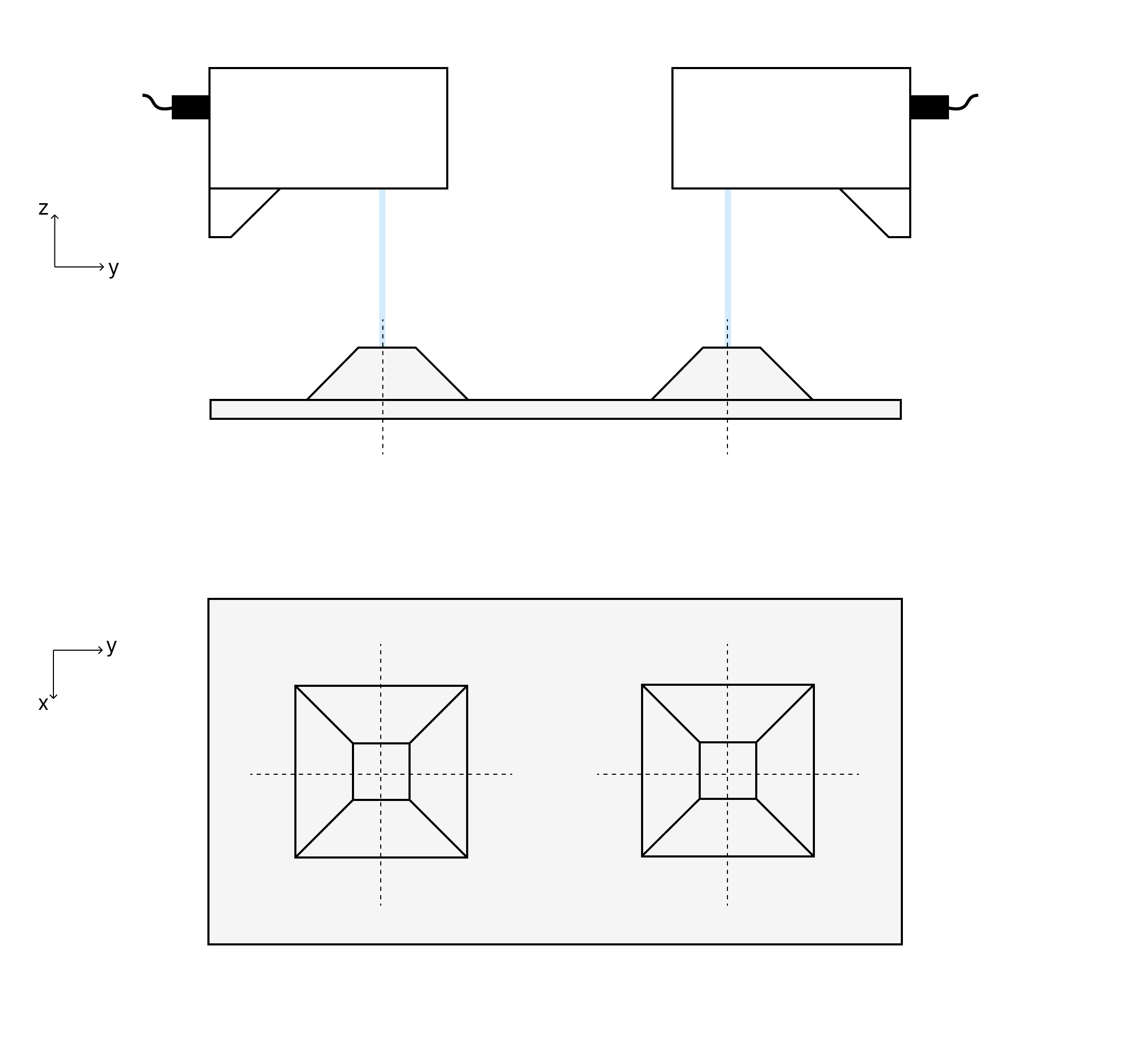
La luz láser emitida por el perfilador láser sea perpendicular a la superficie del tronco.
-
El tronco esté en el centro del campo de visión del perfilador láser.


-
Los cuatro bordes del tronco sean paralelos a las luces láser emitidas.
-
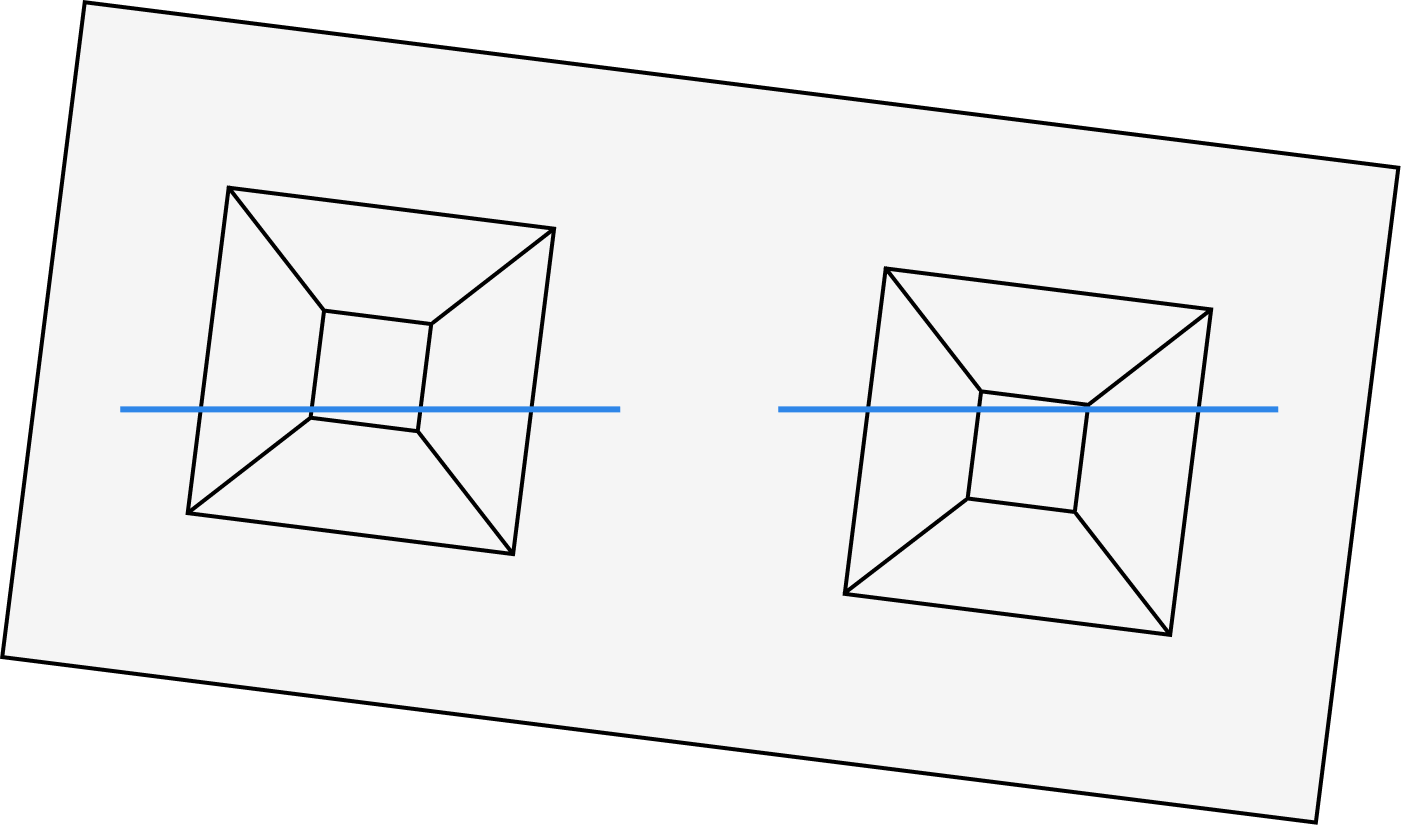
La superficie de la base del objeto de calibración se posicione a la distancia de referencia del perfilador láser (RD en la ilustración de abajo).
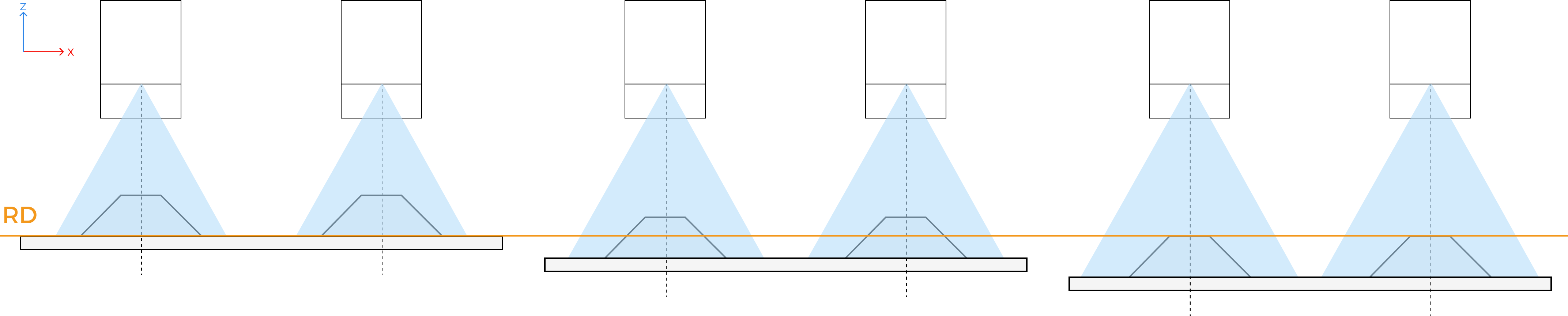
Si las condiciones del sitio son limitadas, puede mover ligeramente el objeto de calibración hacia arriba, en dirección al perfilador láser.
-
-
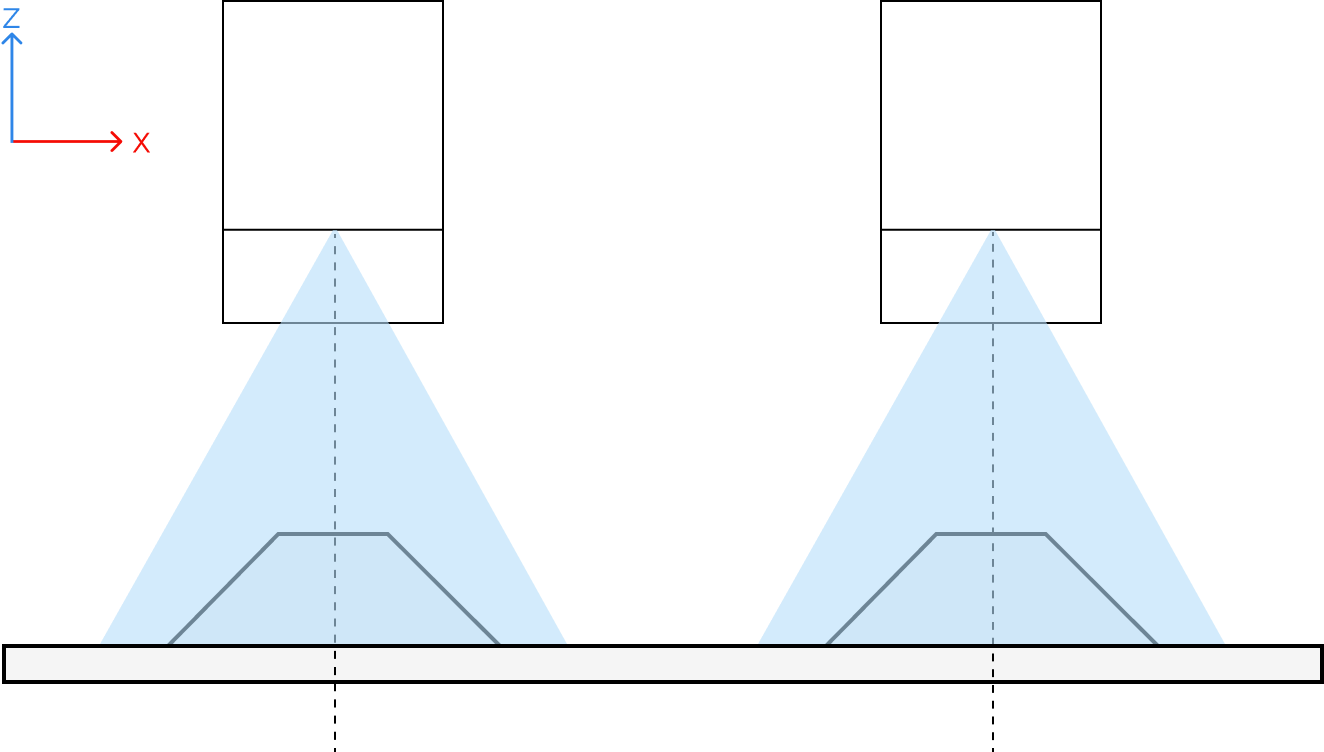
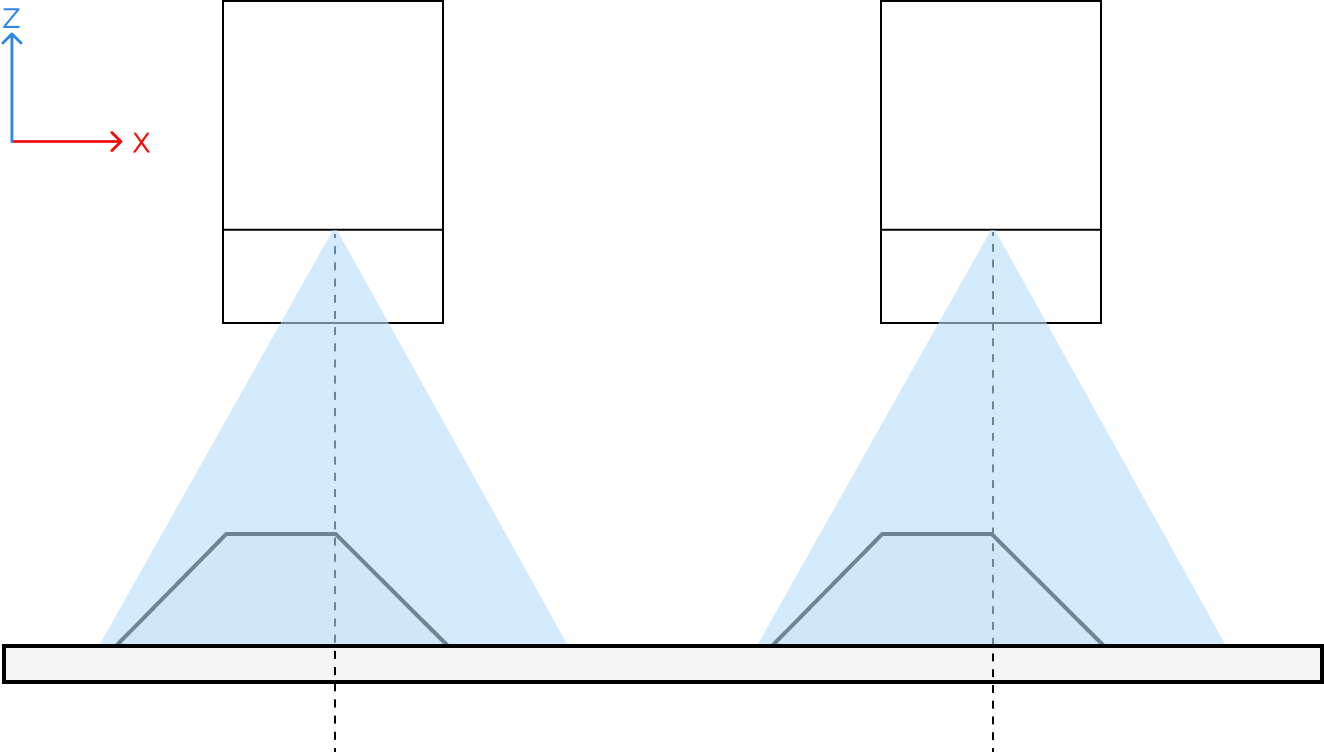
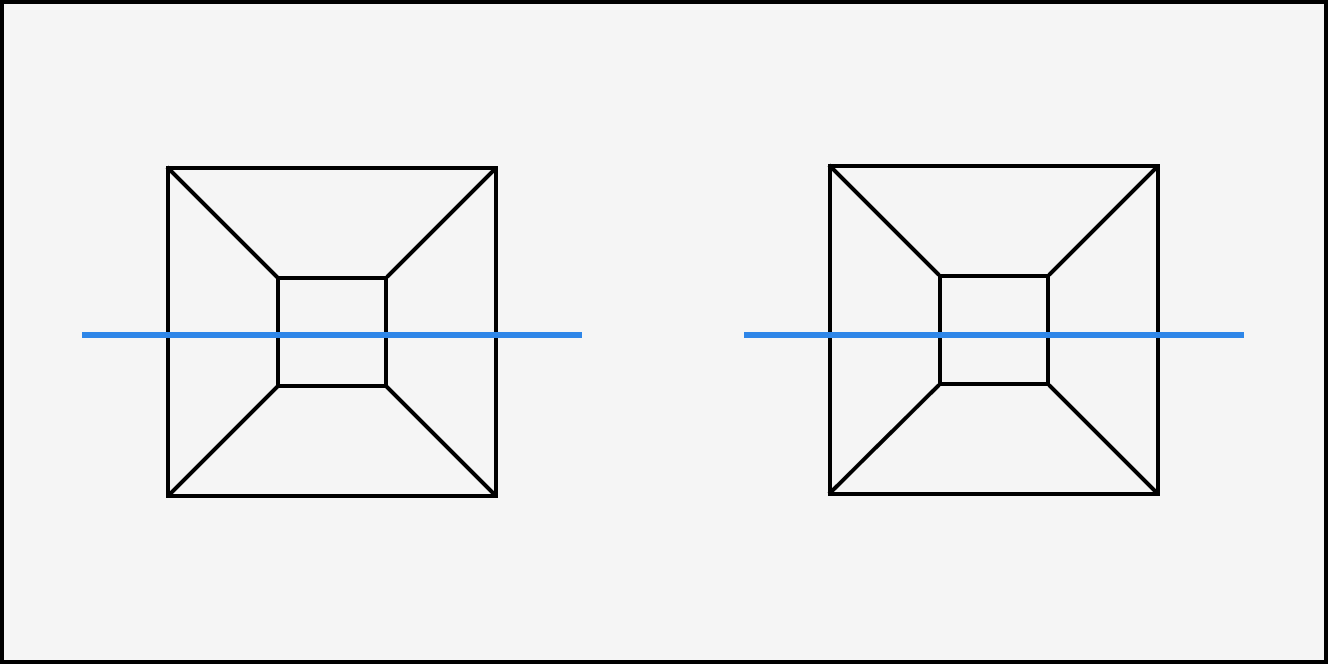
Determine el rango de escaneo: a distancia entre las posiciones inicial y final de escaneo y los extremos de la superficie inferior del tronco sea mayor que la mitad de su longitud. Es decir, tanto la posición inicial como la final de escaneo deben estar dentro de las áreas azules del objeto de calibración, como se muestra en la tabla de abajo.
Después de determinar el rango de escaneo, ajuste la platina de traslación de modo que la luz láser emitida por el perfilador láser incida sobre el objeto desde la posición inicial de escaneo. Esto facilita la adquisición de datos y la evaluación de su calidad durante el ajuste de los parámetros.
Colocación
Lado a lado
Reverso
Ilustración
Posiciones inicial y final de escaneo
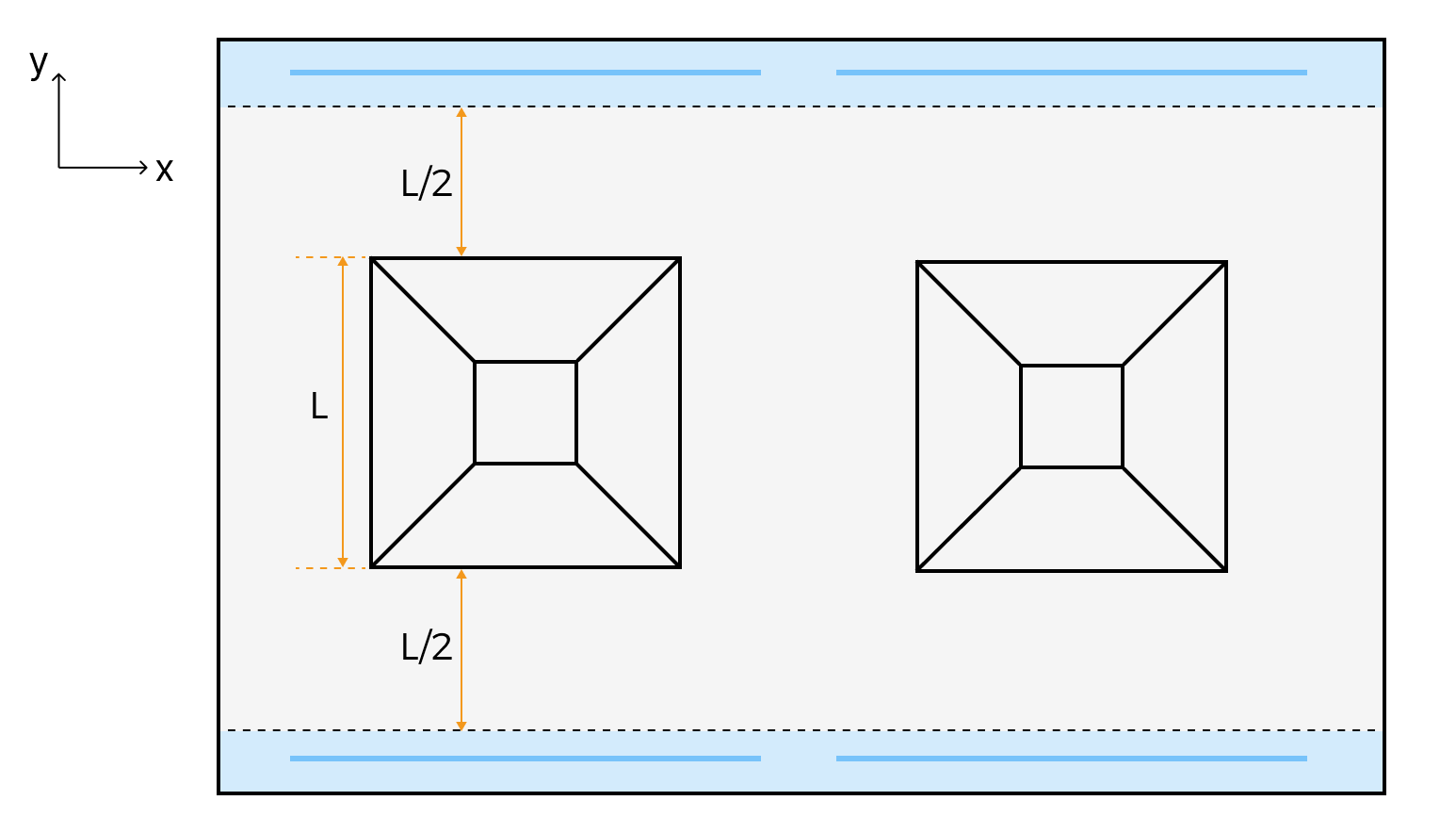
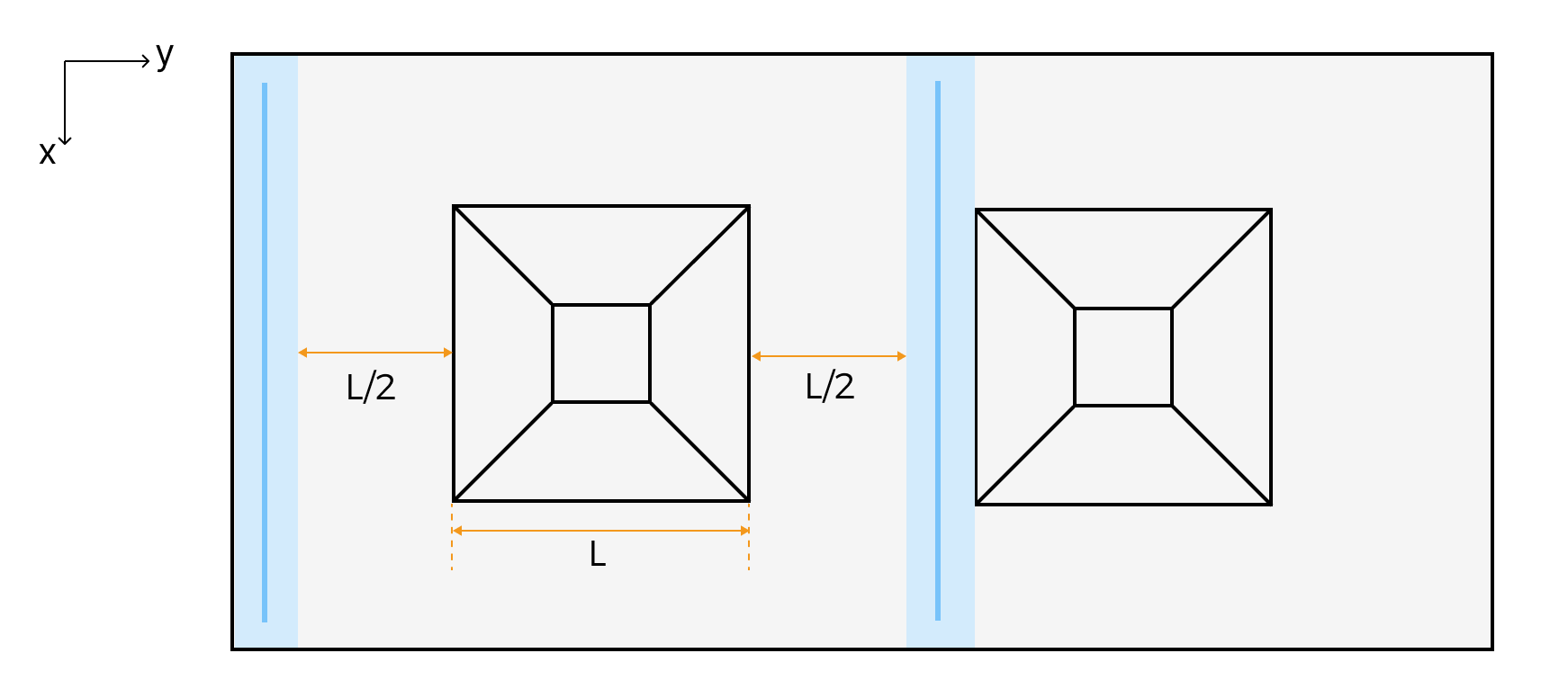
El perfilador láser ubicado a la izquierda en la ilustración de arriba
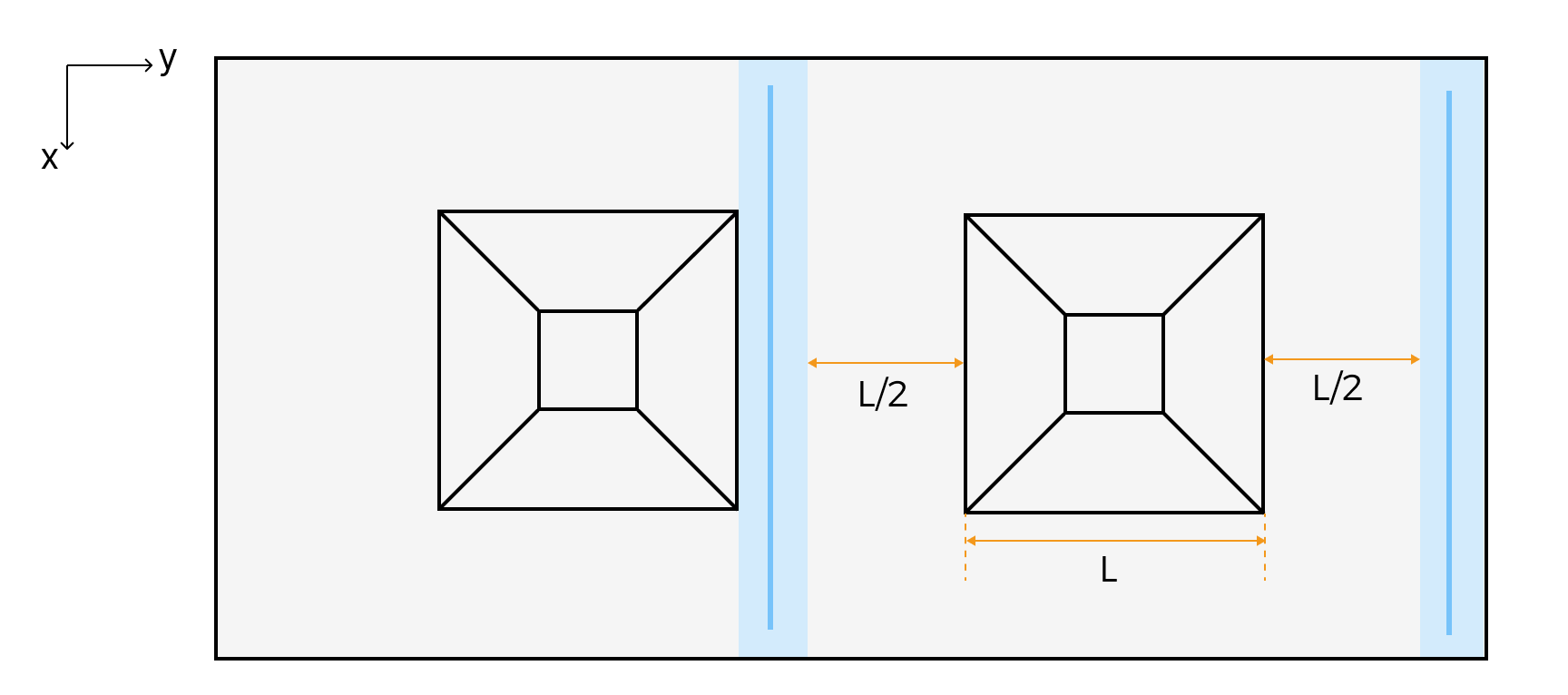
El perfilador láser ubicado a la derecha en la ilustración de arriba
-
Limpie las superficies del objeto de calibración y el vidrio de los perfiladores láser para evitar que el polvo y las manchas afecten la calidad de datos.
-
Asegúrese de que no haya objetos reflectantes cerca del objeto de calibración que puedan interferir con la adquisición de datos. Si los hay, retírelos o cúbralos.
Ajustar los Parámetros
Ajuste los parámetros para cada perfilador láser según el capítulo Ajustar los Parámetros.
Calibrar Perfiladores Láser
Siga los siguientes pasos para realizar la calibración:
-
Caliente el dispositivo con la Herramienta de Calentamiento y, ajuste el tiempo de calentamiento según el tiempo de adquisición, la temperatura del entorno y las condiciones de disipación actuales.
-
Calibrar Múltiples Perfiladores Láser:
-
Si usa Mech-MSR, determine el escenario de calibración primero, y siga las instrucciones para realizar la calibración.
Adquiera datos según la sección flujo de trabajo de activar la adquisición de datos durante el procedimiento de calibración.
-
Si usa Mech-Eye API, consulte el programa de ejemplo MultipleProfilersCalibration.
-
Adquiera datos según la sección flujo de trabajo de activar la adquisición de datos durante el procedimiento de calibración.
-
El valor del parámetro moveDirSign en el programa de ejemplo está determinado por la dirección del objeto de destino en relación con el perfilador láser:
Dirección de movimiento del objeto de destino
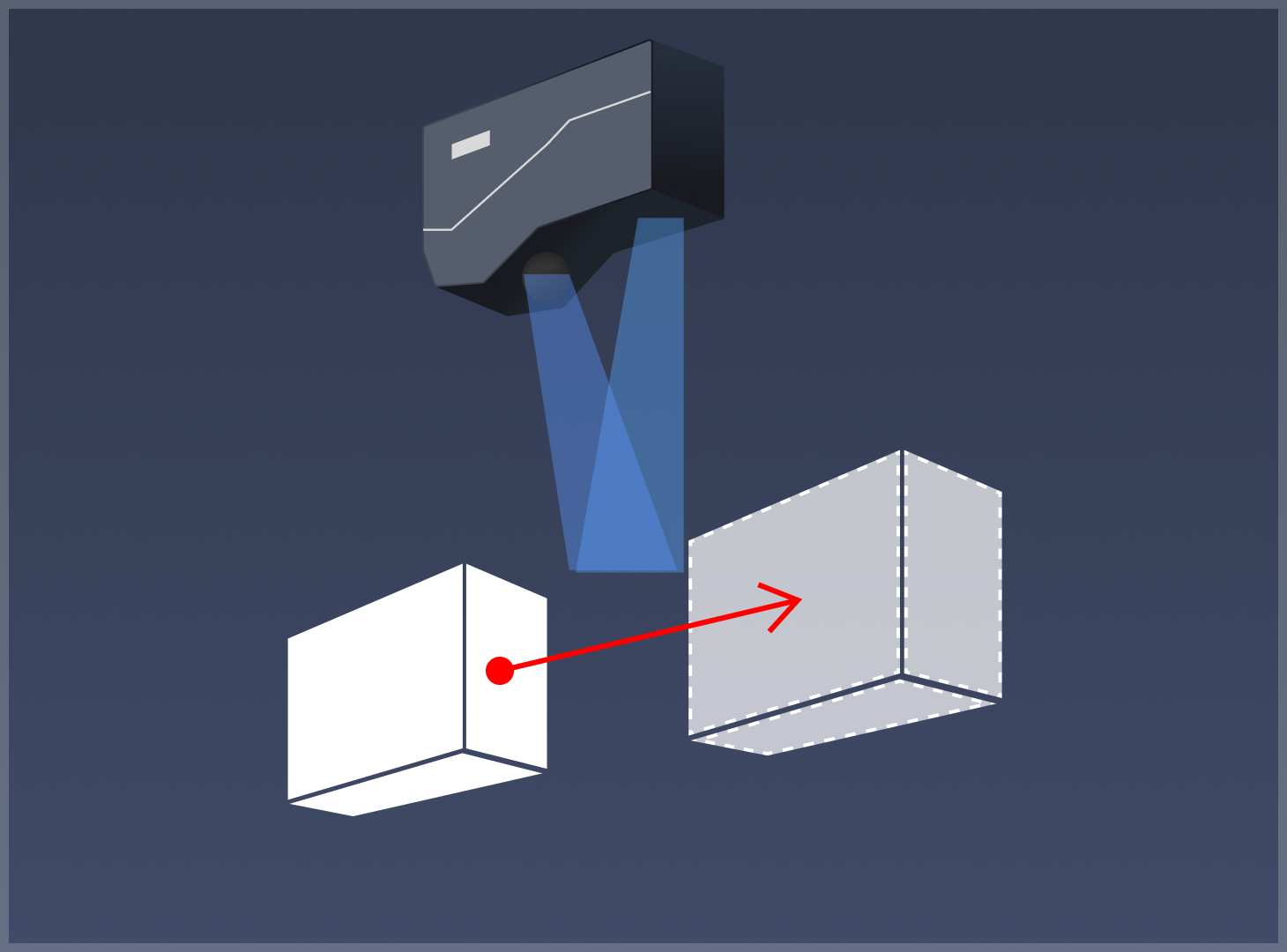
Desde la unidad fotosensible al emisor láser
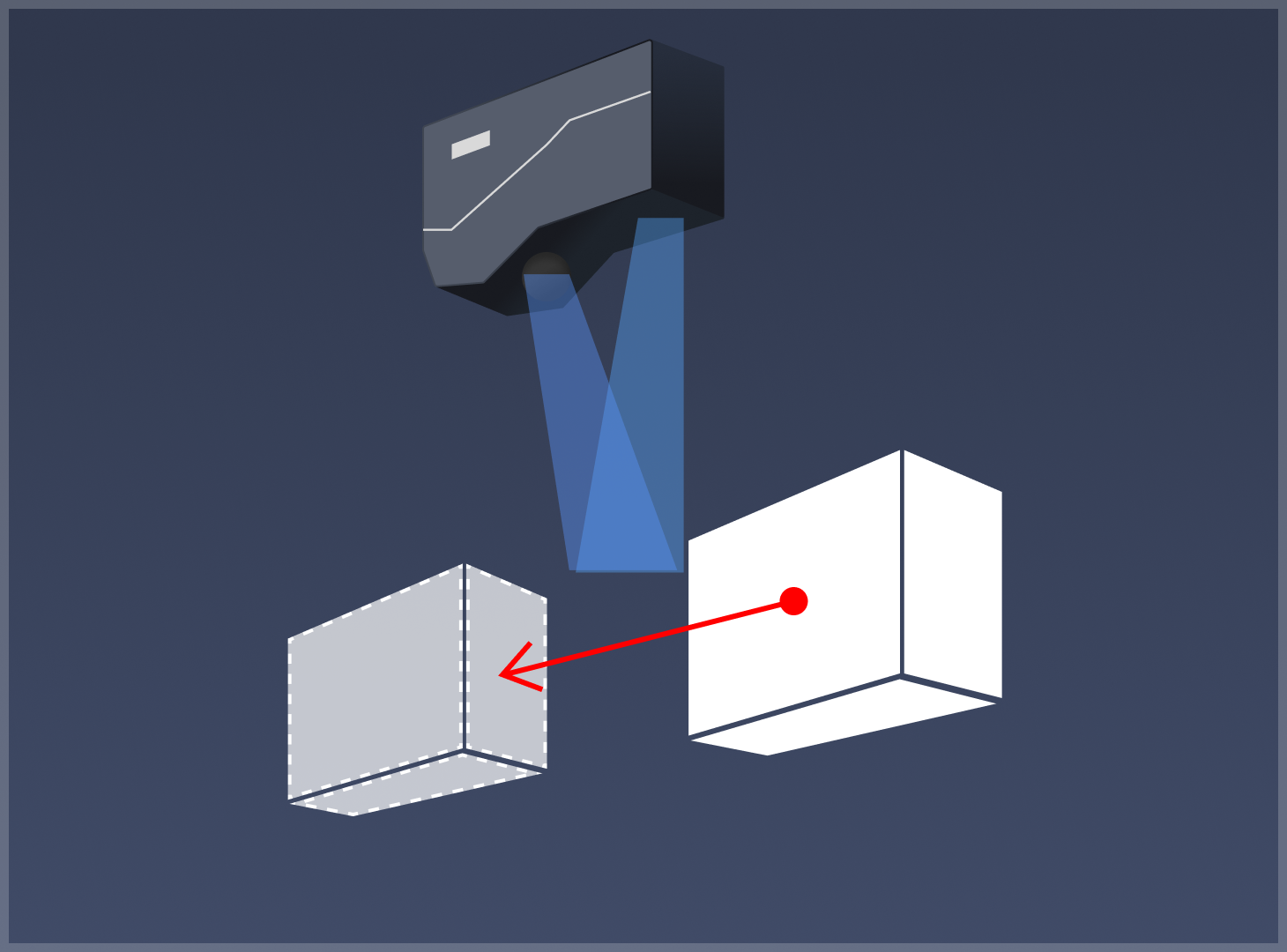
Desde el emisor láser a la unidad fotosensible
Valor del parámetro moveDirSign
True
False
-
-