路径规划工具¶
本文主要介绍路径规划工具及其使用方法。
功能简介¶
路径规划工具用于规划机器人在工件附近的无碰撞运动路径。
机器人的运动路径本质是机器人末端工具完成任务时的移动路径, 此外,机器人移动过程中,末端工具可能与工件或场景物体之间发生碰撞。 因此,为了给路径规划和碰撞检测提供所需的各类资源及数据,需要建立机器人所在的场景、配置机器人末端工具、并输入视觉点和场景点云。 通过路径规划工具,可导入这些资源和数据,完成碰撞检测及路径规划,并通过“路径规划”步骤输出机器人的运动路径,来控制机器人完成抓取等任务。
界面简介¶
路径规划工具界面如下图所示,主要由五部分组成。
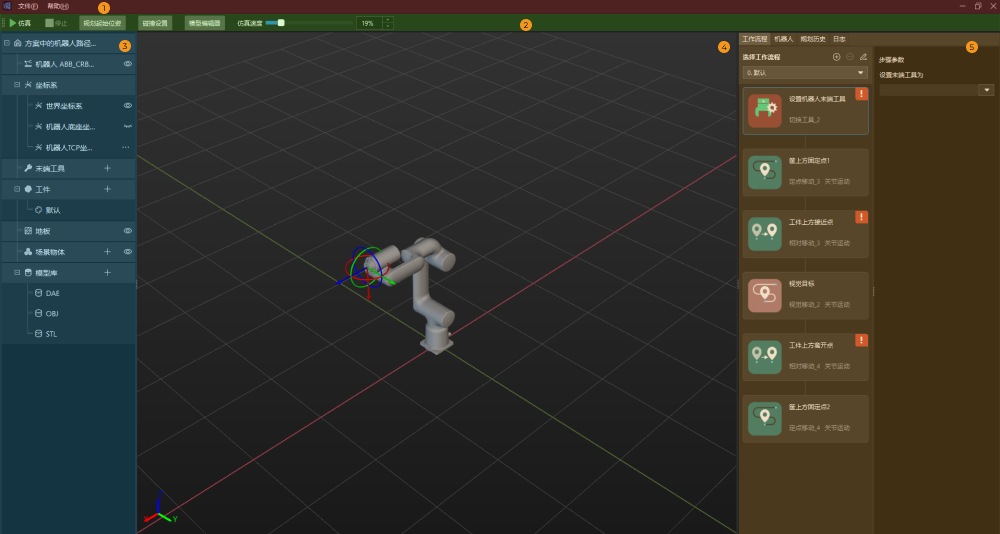
重置配置、保存配置、退出配置器。 |
|
仿真控制、规划起始位姿、碰撞设置、打开模型编辑器。 |
|
管理工程中使用的资源,包括末端工具、工件、场景等。 |
|
仿真过程中显示机器人的运行轨迹、视觉位姿、点云等。 |
|
配置工作流程、机器人位姿、查看规划历史和日志。 |
使用流程¶
路径规划工具的一般使用流程如下:
配置工程资源¶
工程资源指工程中的各种基础资源,包括:末端工具、工件、场景物体等。
通过配置工程资源,您可以:
为碰撞检测提供所需的末端工具和场景物体等模型;
设置末端工具对称性、工件对称性及工件抓取裕度,使路径规划更灵活、有更多可选的路径点。
配置项
说明
末端工具
末端工具是为使机器人完成其任务而专门设计并安装在机器人法兰的装置,例如夹爪、吸盘。
配置详解请参阅 末端工具 。
工件
工件指的是末端工具的作用对象(即目标物体),例如纸箱、金属件、需涂胶或焊接的零件等。
配置详解请参阅 工件 。
地板
模拟真实场景中的地面。默认地板平面与机器人底座底部持平,需根据真实场景的地面高度修改地板平面高度。
右键单击 地板 ,在弹出的工具窗口中拖动滑块或者修改数值,即可调整地板的高度。
场景物体
场景物体指的是真实机器人工作场景中的各类物体,一般包含机器人安全围栏、料筐、托盘、相机、相机支架等。
配置详解请参阅 场景物体 。
搭建工作流程¶
在右侧的“工作流程”选项卡中可搭建工作流程,即以流程图形式搭建的机器人运动控制程序。 通过修改默认工作流程可规划抓取工件时的机器人运动路径。
默认工作流程包含以下步骤。
机器人工具
此步骤用于选择末端工具。单击该步骤后,在右侧的 步骤参数 中单击
,选择在工程资源中配置的对应末端工具。
筐上方固定点1
此步骤用于设置接近工件前的路径点。参数详解请参见 定点移动 。
工件上方接近点
此步骤用于设置工件上方的接近点。参数详解请参见 相对移动 。
视觉目标
此步骤为视觉目标点。参数详解请参见 视觉目标 。
工件上方离开点
此步骤用于设置工件上方的离开点。参数详解请参见 相对移动 。
筐上方固定点2
此步骤用于设置离开工件后的路径点。参数详解请参见 定点移动 。
为了满足实际需求,可在流程中添加或删除“定点移动”与“相对移动”步骤。
添加步骤:鼠标移动到步骤之间的连线,单击
,单击需要添加的步骤。
删除步骤:右键单击步骤后,在弹出的菜单中单击 删除 ,或选中步骤后按 Delete 。
此外,使用相同的工程资源可以配置不同的工作流程,完成不同的路径规划。 在同一个工程涉及到不同工件或料筐的场景中,可能需要添加多个工作流程,并通过 切换参数配方 来更改工作流程。
单击
碰撞设置¶
配置碰撞检测来检测可能发生的碰撞。软件默认检测机器人、末端工具、场景物体之间的碰撞,开启 检查点云碰撞 后将检查输入点云与末端工具之间的碰撞。
单击工具栏的 碰撞设置 ,请依据项目对碰撞的允许程度设置以下参数。
- 点云立方体边长
在碰撞检测中,会以点云里的每一个点为中心构建一个立方体。检测末端工具与点云的碰撞,实际是检测与各个立方体的碰撞。点云立方体边长越大,末端工具与其碰撞的可能性越高,碰撞的体积越大。
- 末端工具与点云的碰撞体积阈值
当末端工具与点云的碰撞体积超过阈值时将判定为发生碰撞,否则判定为未发生碰撞。
- 点云碰撞记录
记录:规划历史会记录发生碰撞的点云的位置和数量。用户在查看规划历史时,被记录的点云会在仿真空间中高亮显示。选择“记录”将降低运行效率。
不记录:无法在规划历史中追溯发生碰撞的点云的位置。运行效率比使用“记录”时更高。
设置完成后,单击 确认 。