工程文件结构¶
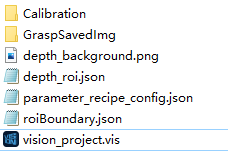
视觉工程的文件结构如下图所示,主要由以下文件组成:
算法流程文件(图中 vision_project.vis) :用于存储算法处理流程。
相机参数文件(图中 Calibration):用于保存相机内外参以及标定数据。
工程配置文件(图中 depth_background.png,depth_roi.json,roiBoundary.json 等):描述工作环境的先验条件,用于添加对工程的限制。
视觉工程文件在执行相应的操作后会在对应的工程路径下自动生成,无需手动建立。
视觉工程的文件结构如下图所示,主要由以下文件组成:
算法流程文件(图中 vision_project.vis) :用于存储算法处理流程。
相机参数文件(图中 Calibration):用于保存相机内外参以及标定数据。
工程配置文件(图中 depth_background.png,depth_roi.json,roiBoundary.json 等):描述工作环境的先验条件,用于添加对工程的限制。
视觉工程文件在执行相应的操作后会在对应的工程路径下自动生成,无需手动建立。