통계 데이터를 통해 포즈의 반복 정밀도를 체크하기¶
기능 설명¶
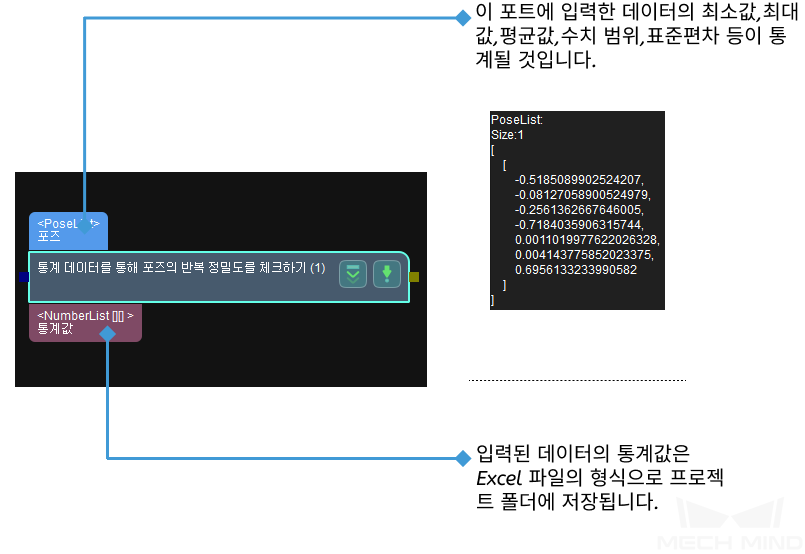
이 스텝은 비전 프로젝트 포즈의 안정성을 확인하는 데 사용됩니다.
같은 작업물을 다른 위치에서 10~20회 촬영하여 프로젝트에서 작업물이 출력하는 포즈 데이터(최소값, 최대값, 평균값, 수치 범위, 표준편차)를 통계하여 포즈와 기타 데이터의 안정성을 판단합니다.
응용 시나리오¶
이 스텝은 카메라 안정성을 확인하거나 비전 프로젝트 파라미터의 유효성을 확인하는 데 사용됩니다.
3D 매칭과 관련된 스텝에 연결하여 매칭의 안정성을 계산할 수 있습니다. 또는 프로젝트의 출력 스텝 전에 연결되어 공작물의 위치를 변경하지 않고 카메라가 공작물의 이미지 데이터를 수집하여 위치 지정의 안정성 및 인식 오차를 확인합니다.
입력 및 출력¶
파라미터 조절 설명¶
통계를 위한 데이터
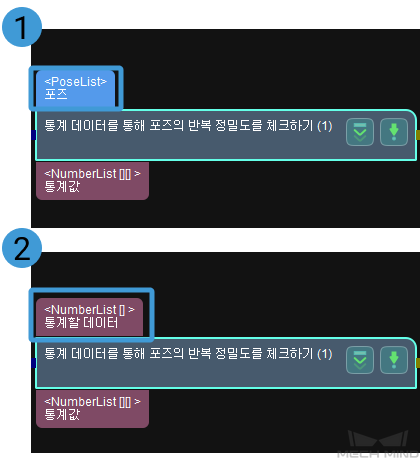
- 입력 데이터 유형
- 기본값: PoseListInput값 리스트: PoseListInput(하나 혹은 이상의 포즈 데이터 세트를 입력),NumberListInput(기타 데이터 입력)조정 설명: 입력 데이터 유형을 선택하는 데 사용되며, 다른 입력 데이터 유형은 다른 입력 포트에 해당합니다.
- 출력 데이터 유형
- 기본값: 공간 위치 및 오일러 각의 통계 수치.조정 설명: 출력 데이터 유형을 설명하는 데 사용되며 편집할 필요가 없으며 기본값을 유지하면 됩니다.
- 허용 가능한 위치 좌표 편차 역치
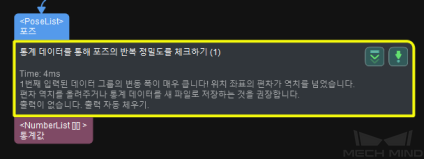
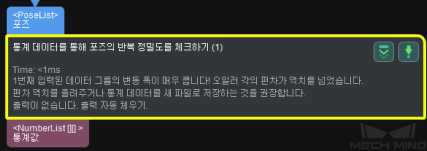
- 기본값: 1.0 mm값 범위: 0~1000조정 설명: 이 파라미터는 허용 가능한 공간 위치 편차 범위의 상한을 설정하는 데 사용됩니다. 현재 데이터와 이전 데이터의 차이가 설정 값을 초과하면 아래 그림과 같이 이 스텝에서 오류가 보고됩니다. 예를 들어 이 파라미터의 값이 0.1이고 이전 입력 포즈의 x 좌표 값이 1이고 현재 입력 포즈의 x 좌표 값이 0.7이면 이 스텝에서 오류를 보고합니다.
- 허용 가능한 오일러 각도 역치 범위
- 기본값: 0.100°값 범위: 0~360조정 설명: 이 파라미터는 허용 가능한 오일러 각도 편차 범위의 상한을 설정하는 데 사용됩니다. 현재 데이터와 이전 데이터의 차이가 설정된 역치를 초과하면 아래 그림과 같이 이 스텝에서 오류가 보고됩니다. 예를 들어 이 파라미터의 값이 5이고 이전 입력 포즈의 오일러 각도에서 a 값이 30이고 현재 입력 포즈에서 a 값이 36이면 이 스텝에서 오류를 보고합니다.
통계 저장
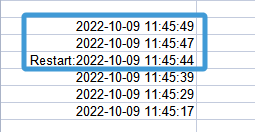
- 다시 시작
- 기본값: 체크하지 않음.조정 설명: 데이터 통계 중 공작물 위치가 변경되거나 비정상적인 데이터 그룹이 도입되면 이 항목을 선택하여 데이터를 다시 통계할 수 있습니다. 이 옵션을 선택하면 "다시 시작" 플래그가 출력 데이터에 추가되고 이 스텝이 한 번 성공적으로 실행된 후 체크를 취소한 상태로 재설정됩니다. 사용자가 재통계 데이터를 원할 때 이 항목을 체크할 수 있습니다. 통계 데이터 파일에서 "다시 시작" 표시의 타임스탬프 이후의 데이터는 통계 범위에 포함됩니다(아래 그림의 파란색 상자 참조). "다시 시작" 표시의 타임스탬프 이전 데이터는 계산되지 않습니다.
- 소수점 이하 자릿수
- 기본값: 3값 범위: 0~8조정 설명: 이 파라미터는 통계 데이터의 소수점 이하 보류할 자릿수를 설정하는 데 사용됩니다.
- 파일 기본 명칭
- 기본값: 없음.조정 설명: 이 파라미터는 저장된 통계 데이터 파일의 이름을 설정하는 데 사용됩니다. 파일 기본 명칭이 설정되지 않은 경우 통계 파일의 이름은 "poseStatistics"입니다.
- 저장 경로
- 기본값: 없음.조정 설명: 통계 데이터 파일의 저장 경로를 설정하는 파라미터로 우측
 버튼을 클릭하여 저장 경로를 선택합니다. 저장 경로가 설정되지 않은 경우 통계 데이터 파일은 프로젝트 폴더에 저장됩니다.
버튼을 클릭하여 저장 경로를 선택합니다. 저장 경로가 설정되지 않은 경우 통계 데이터 파일은 프로젝트 폴더에 저장됩니다.