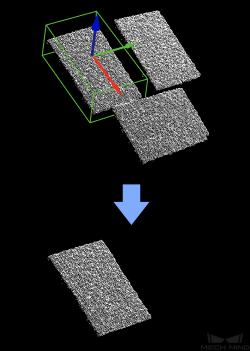
직육면체 내의 포인트 클라우드를 추출하기¶
기능 설명
지정된 직육면체 내의 포인트 클라우드를 추출하고 직육면체 외부의 포인트 클라우드를 제거합니다.
응용 시나리오
특별한 제한 없이 대부분 시나리오에서 사용될 수 있는 포인트 클라우드 추출 스텝입니다. 직육면체의 치수는 포트를 통해 입력하거나 파라미터에서 설정할 수 있습니다.
입력 및 출력
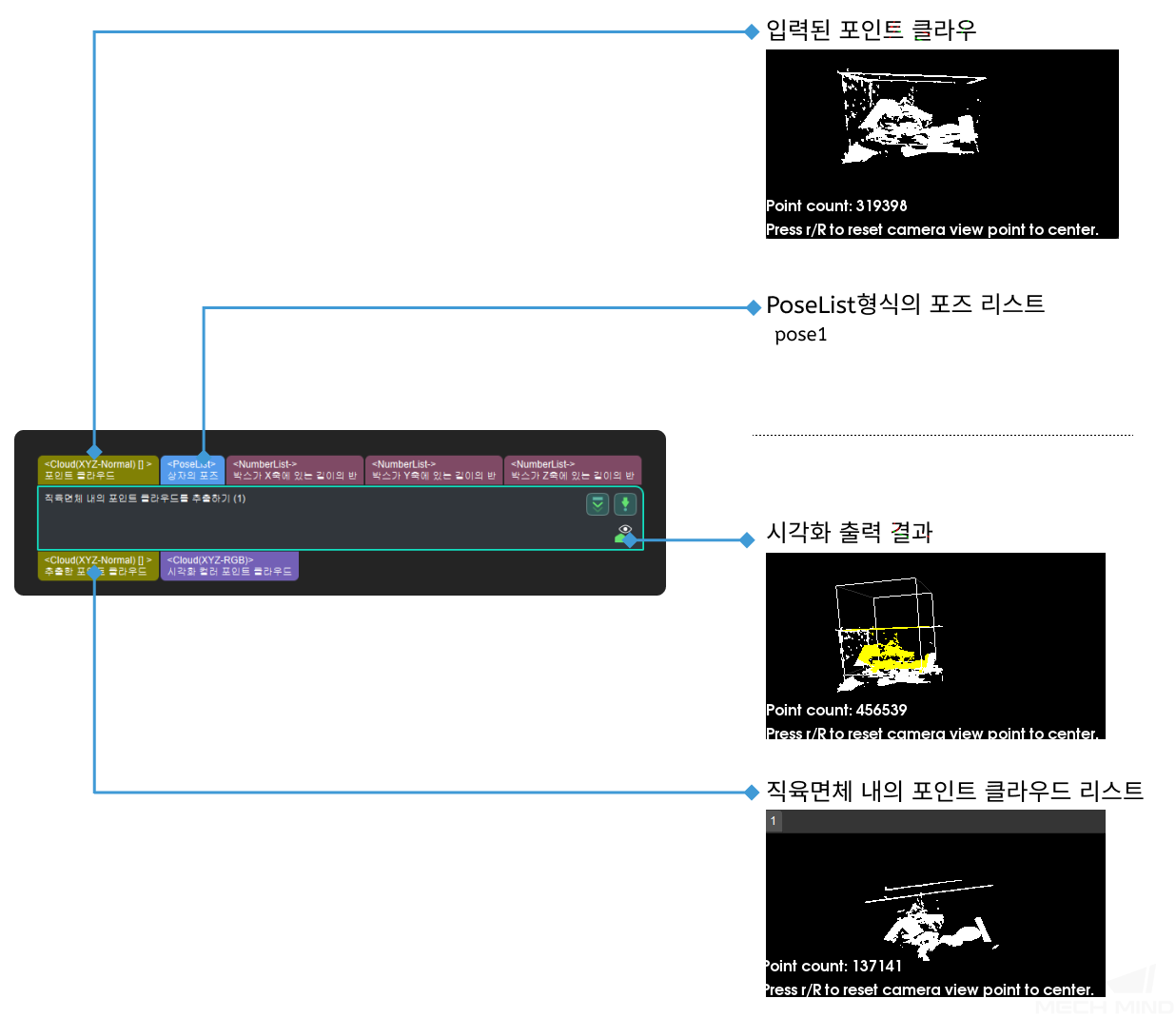
파라미터 설명
상자 크기 설정
- X축에 있는 상자의 절반 길이(halfX)
- Y축에 있는 상자의 절반 길이(halfX)
- Z축에 있는 상자의 절반 길이(halfX)
입력된 포인트 클라우드의 용법 설명
기본값: OneToOne값 리스트: OneToOne, FirstToAll, AllToFirst설명: 다른 파라미터를 선택하여 입력된 포인트 클라우드의 다른 용법을 채택합니다.