UR(ユニバーサルロボット)¶
本節では、VizによりURロボットをティーチングする方法について説明します。主に次の手順が含まれます。
ロボットの運動がURスクリプトによって制御されるため、コントロールがロボットにURスクリプトを送信することでロボットの制御することができます。
注意
ロボットがスクリプトを受信すればすぐにそれを実行します。プログラムがまだ完成していないときに運動のコマンドを含むスクリプトを受信したら、ロボットは非常停止して直ちに新しいスクリプトを実行します。30002ポートを介してsec文(def文でなく)で運動コマンドを含まないスクリプト関数を送信すれば、ロボットは非常停止することはありません。
UR5EなどEシリーズのロボットについては、リモートコントロールに設定しなければMech-Vizによってロボットの運動を制御できません。そうしないとロボット同期することができますが移動させることはできません。
ネットワーク接続を確立¶
ロボットを起動してネットワークケーブルをコントローラに接続します。
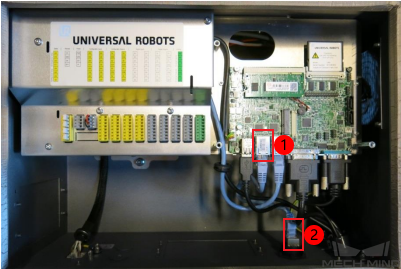
①はコントローラのネットワークポートで、②はデフォルトネットワークポートです。
ちなみに
ケーブルのオス・メスの延長によるネットワークの不安定を回避するために、①ポートを使用することを推奨します。
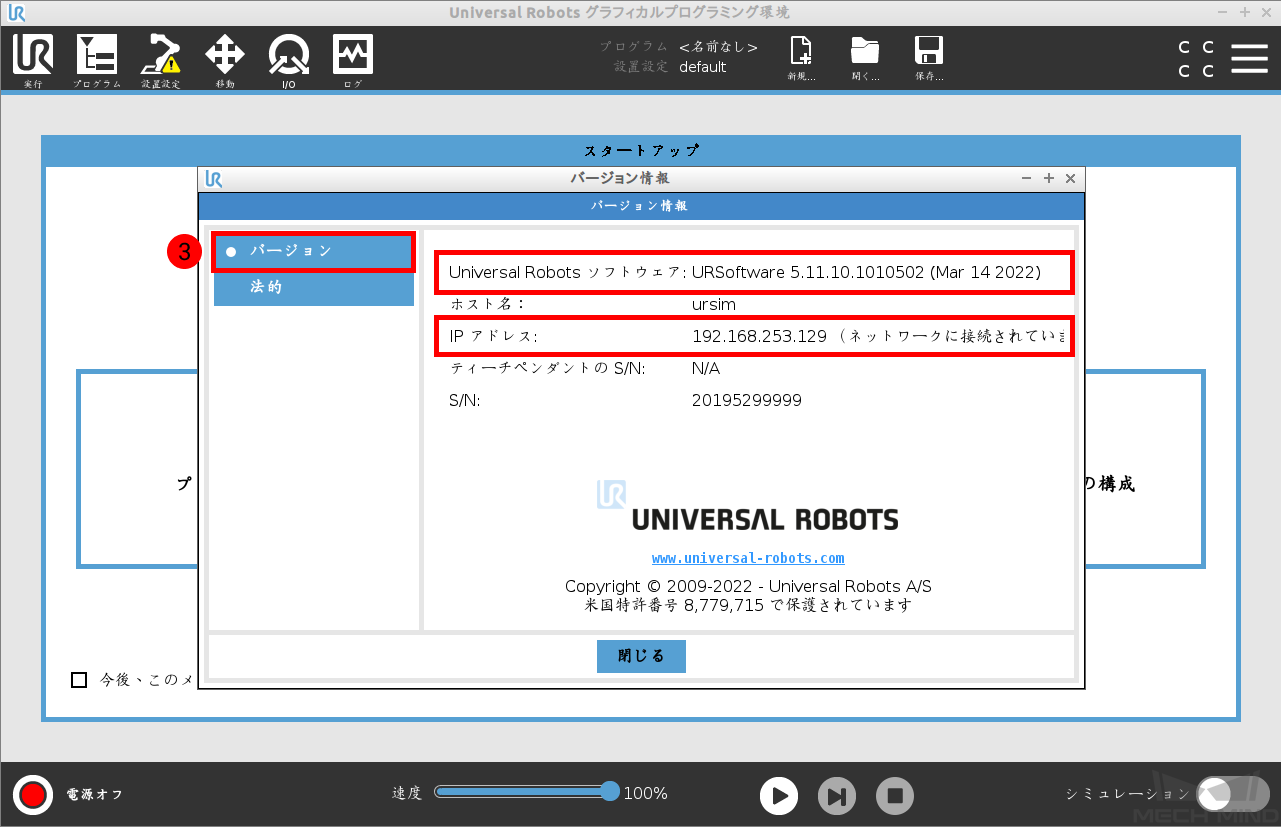
IPとコントローラのバージョンを確認¶
ティーチペンダントの右上隅のアイコンをクリックします。

バージョン情報 を選択します。

バージョン をクリックします。
IP設定¶
ティーチペンダントの右上隅のアイコンをクリックします。
ロボットの設定 を選択します。

をクリックします。

ロボットIPを産業用コンピュータIPを同じネットワークセグメントに設定します。設定後に 適用 をクリックします。
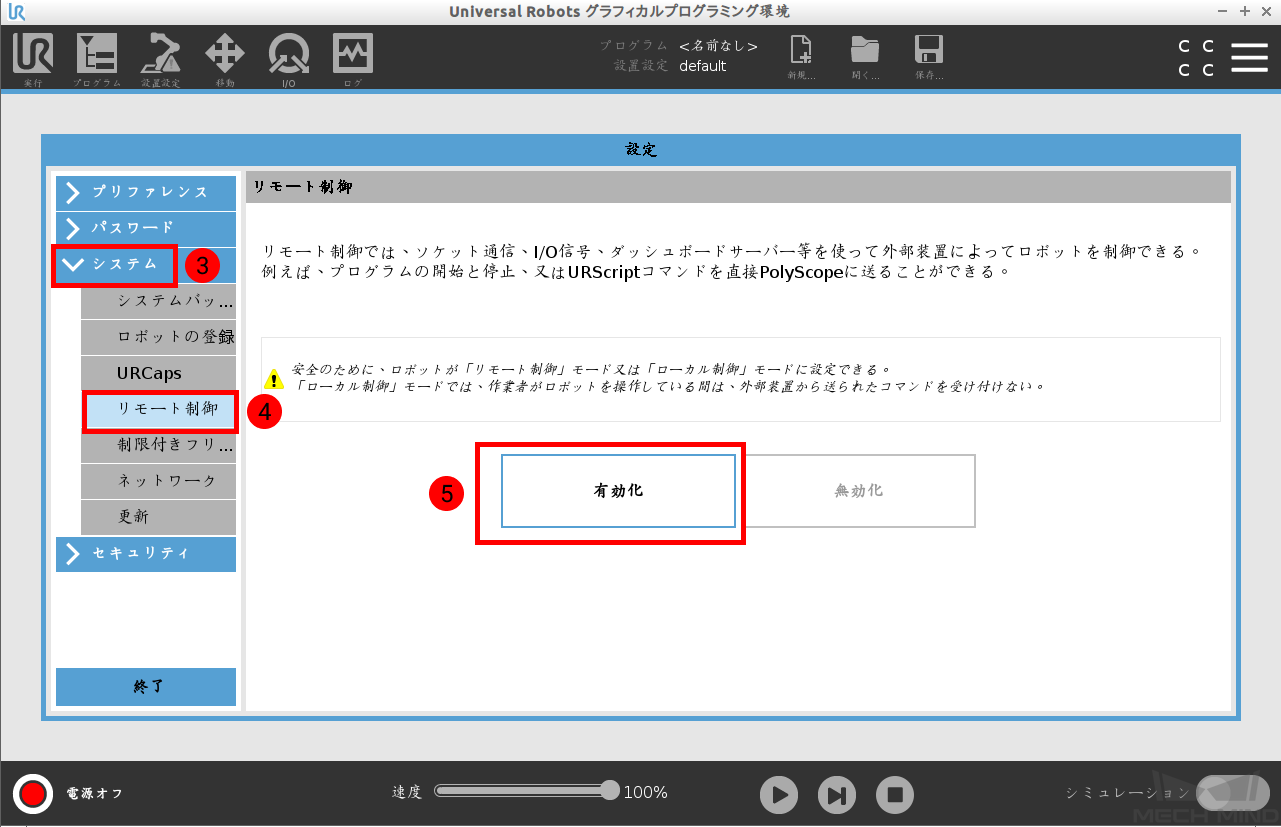
リモート制御を有効化¶
ティーチペンダントの右上隅のアイコンをクリックします。
ロボットの設定 を選択します。
をクリックします。
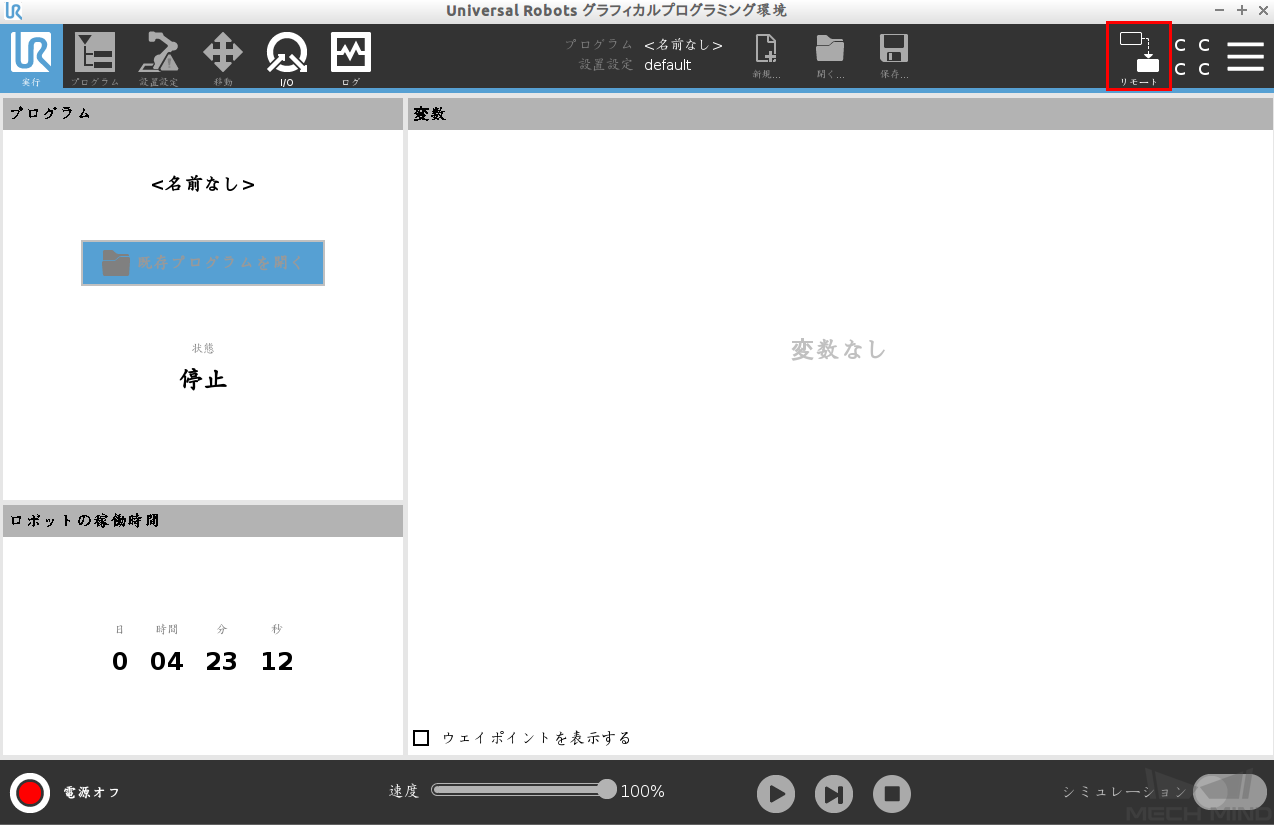
ティーチペンダントの右上隅に ローカル アイコンをクリックすると、 リモート制御 オプションが表示されます。

リモート制御 オプションをクリックすると、リモート制御モードが有効になります。
Mech-Centerの設定を確認してロボットに接続¶
詳しくは、 ロボットの接続状態をテスト をご参照ください。