位置姿勢のある軸を指定された方向に向ける¶
機能のディスクリプション
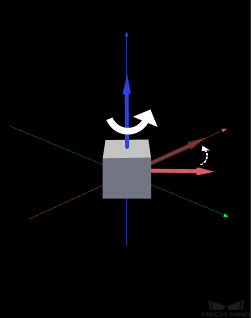
位置姿勢のある軸を設定された基準方向に向くように調整します。
使用シーン
通常、位置姿勢の方向の調整が必要な各種のシーンに適用されます。
このステップは古いバージョンであり、物体の対称性に応じて位置姿勢を回転する場合(このステップでパラメータ「校正方法」を「ROTATION」に設定してください)、新しいバージョンの 対称性制約で位置姿勢を指定方向に回転 を使用し、ステップ 3Dベクトルをクイック作成 と併用してください。
入力と出力
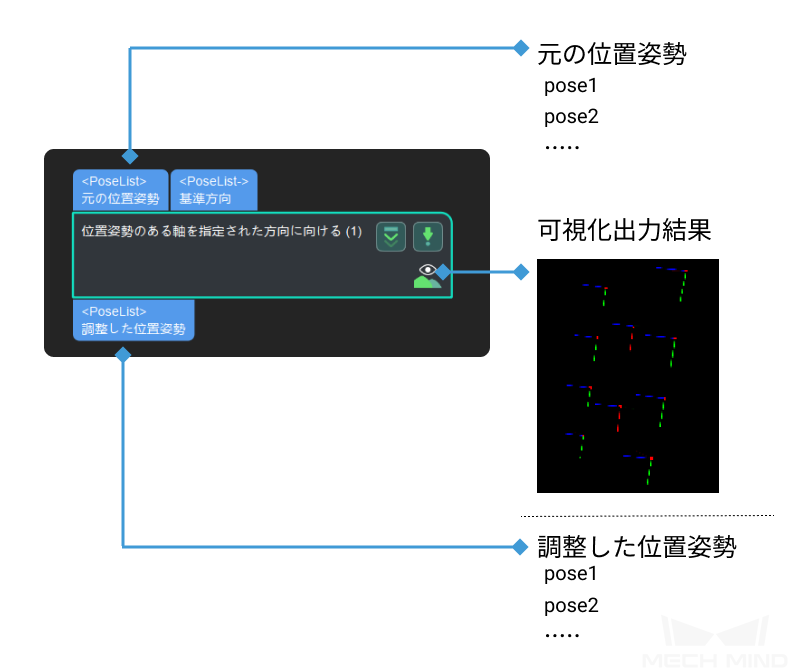
パラメータの説明
- 方法選択
校正方法
HARD_RECTIFY:初期値。二番目の入力(基準位置姿勢)があり、「useFirstRefPose」にチェックを入れた場合、基準方向は最初の位置姿勢に対応する軸の方向です。それ以外の場合は、すべての基準位置姿勢に対応する軸のタイプを基準方向とします。基準位置姿勢の入力がない場合、「reference Dir」は基準方向を決めます。ROTATION:物体の対称性に応じて対称角度を設定し、調整する回転軸を指定した基準軸の方向とほぼ同じにします。
- 軸の設定
調整する軸
調整説明:補正する回転軸です。オプション:X、Y、Z(初期値)
- 基準方向(Reference Dir)
X軸
初期値:0。調整説明:基準軸Xの方向ベクトルです。Y軸
初期値:0。調整説明:基準軸Yの方向ベクトルです。Z軸
初期値:1。調整説明:基準軸Zの方向ベクトルです。
一般的な使用方法
対象物位置姿勢のある軸を固定するために使用されます。例えば、立方体対象物の表面のX軸方向はランダムに指定され、一部のロボットのエンドエフェクタはこの角度に回転できないため、把持位置姿勢に到達できません。