指定軸が基準方向と最小角度になるように位置姿勢を調整¶
機能のディスクリプション
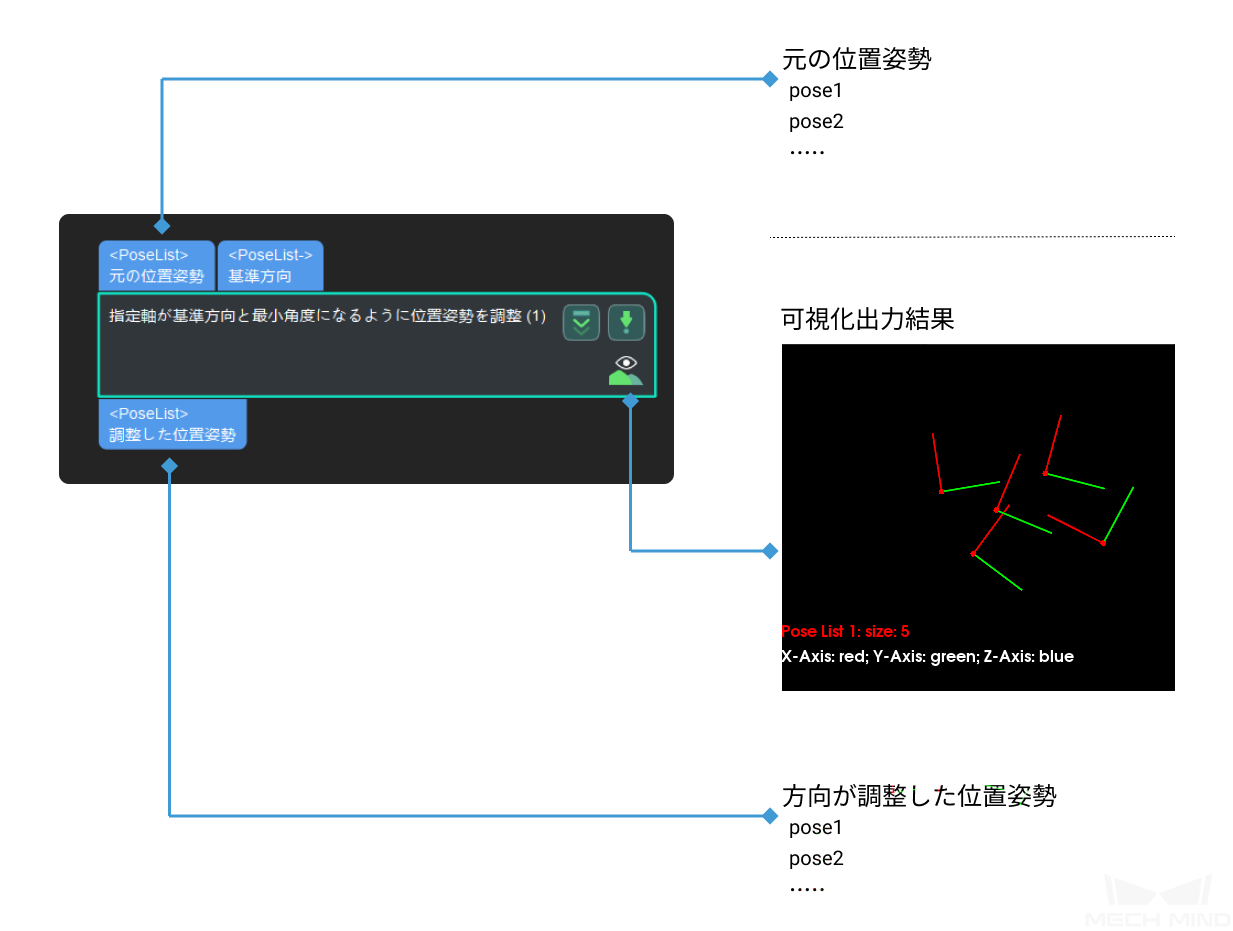
位置姿勢のある軸を中心に、もう一つの軸を基準方向との角度が最小になる方向に調整します。
使用シーン
通常、位置姿勢の方向の調整が必要な各種のシーンに適用されます。
このステップは古いバージョンであり、更に機能が揃っている新しいバージョンのステップ 位置姿勢を目標方向に回転(制限なし) を使用し、ステップ 3Dベクトルをクイック作成 と併用してください。
入力と出力
パラメータの説明
入力位置姿勢方向を使用(Use Input Pose Dir)
使用する場合、二番目の入力(基準位置姿勢)が必要です。
マッピングタイプ
初期値:FirstToAllオプション:FirstToAll、OneToOne調整説明:入力位置姿勢と基準位置姿勢のマッピングタイプ。 FirstToAllは、基準位置姿勢の最初の位置姿勢をすべての入力位置姿勢にマップします。OneToOneは、同じ数の基準位置姿勢と入力位置姿勢を処理する必要があり、基準位置姿勢を入力位置姿勢に1対1でマップします。揃える座標軸
初期値:Zオプション:X、Y、 Z調整説明:基準位置姿勢のある軸を基準軸として選択します。基準方向
X
初期値:0調整説明:基準軸Xの方向ベクトルです。Y
初期値:0調整説明:基準軸Yの方向ベクトルです。Z
初期値:1調整説明:基準軸Zの方向ベクトルです。基準点を通じて基準軸の方向を計算
基準点を使用
初期値:チェックを入れないオプション:チェックを入れる/チェックを入れない調整説明:基準点を使用して基準軸を計算するかどうかを設定します。基準点X座標
初期値:0調整説明:基準点のX座標です。基準点Y座標
初期値:0調整説明:基準点のY座標です。基準点Z座標
初期値:0調整説明:基準点のZ座標です。相対Z値を使用
初期値:チェックを入れないオプション:チェックを入れる/チェックを入れない調整説明:認識された対象物の高さが変化する場合は、それをチェックできます。相対Z値
初期値:0調整説明:対象物のZ方向重さ=Z軸の基準点によって決定されるベクトルの重さ+相対Z軸の値(relativeZValue)。座標軸
固定座標軸
初期値:Yオプション:X、Y、 Z調整説明:回転軸回転する座標軸
初期値:Zオプション:X、Y、 Z調整説明:回転する軸
一般的な使用方法
複数の対象物の座標軸の方向を統一するために使用されます。たとえば、位置姿勢を送信するときにオフセットを計算するには、対象物の位置姿勢の軸が一致している必要があります。