ツールと対象物の設定¶
本節では、ツールと対象物の設定を行います。
ツール設定の目的は、ツールのモデルを3Dシミュレーションエリアに表示し、かつ衝突検出にも使用することです。
対象物の設定は、対象物を把持する時のロボットの動作経路計画に使用されます。
主に以下の内容が含まれています。
衝突モデルを追加して調整¶
衝突モデルの追加¶
ヒント
Mech-Vizの.STLモデルは「メートル」単位です。他のソフトウェアを使用して.STLモデルを作成する場合、「メートル」単位でエクスポートする必要があります。
本例のモデルの格納場所はMech-Vizサンプルプロジェクトの sampleviz_ja¥end_effectors¥collision_models フォルダです。
操作手順:
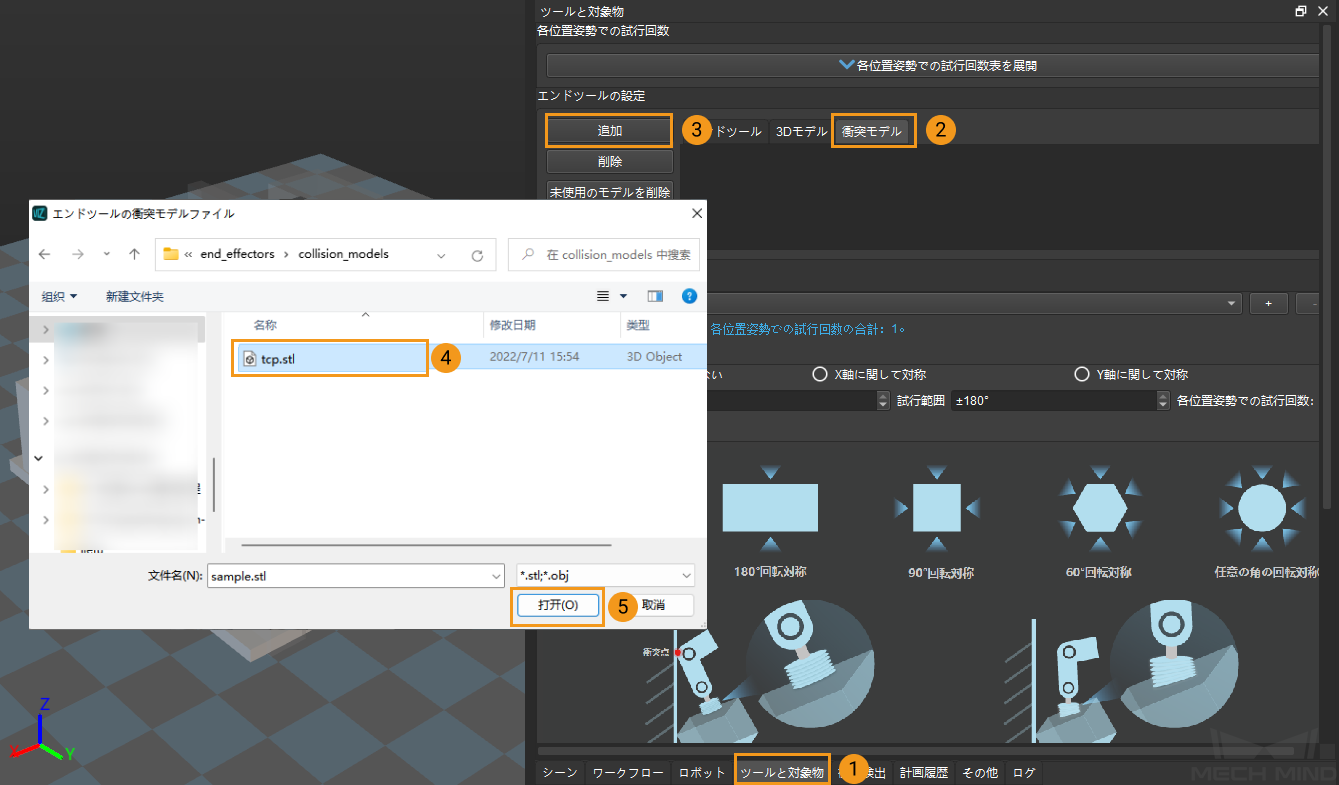
ツールと対象物 をクリックします。
衝突モデル をクリックします。
追加 をクリックします。
用意したモデルを選択します。
開く をクリックします。
上記の手順に従って設定したら、モデル名が衝突モデルのリストに表示されます。
これでモデルは3Dシミュレーションエリアに表示されていませんが、モデル名をクリックすると表示できます。
モデルの調整¶
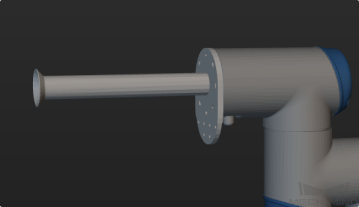
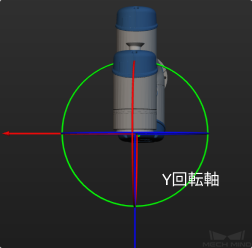
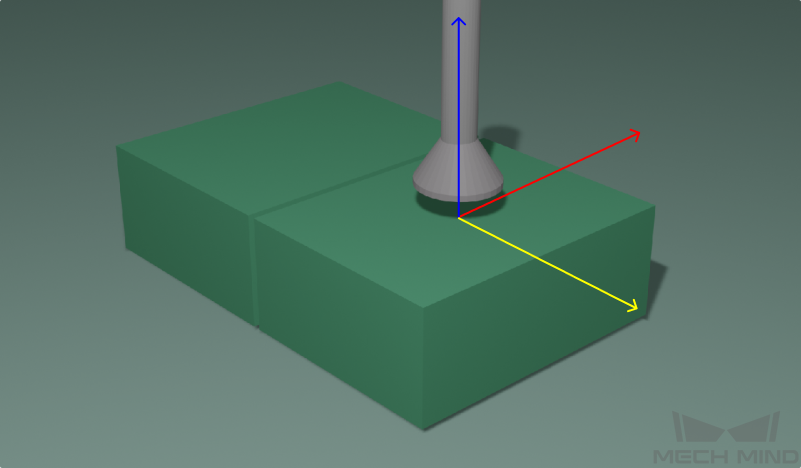
3Dシミュレーションエリアでのモデルの位置は、実際のエンドツールがロボットに取り付けられている位置と一致している必要があります。
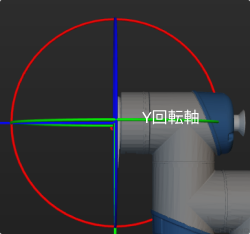
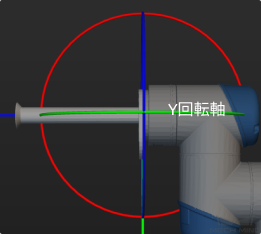
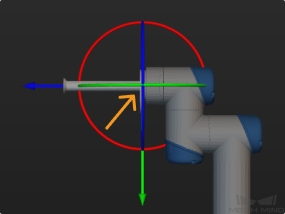
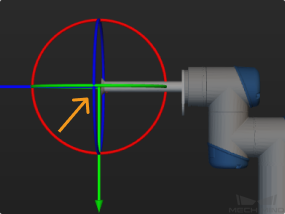
本例では、エンドツールモデルの正確な位置を下図に示します。
実際の操作では、インポートされたエンドツールモデルの位置が間違った場合があるため、調整する必要があります。
下図に示している間違った位置を例として説明します。

次の操作で、モデルを正確な位置に調整することができます。
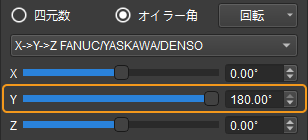
衝突モデルの名前をダブルクリックして、 モデルの変換を編集 の画面が表示されます。
パラメータ Y を調整し、モデルを180°回転させて正確な位置に戻します。
変更前のパラメータ
変更後のパラメータ
パラメータ変更

間違った状態
正確な状態
上面図
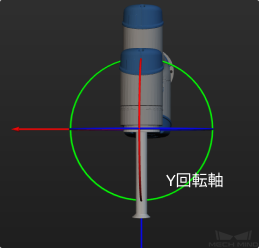
側面図
ヒント
また、 モデルの変換を編集 画面でモデルのスケール、座標も調整可能です。実際の状況に応じてパラメータを調整してください。
ツールの追加¶
操作 |
サンプル図 |
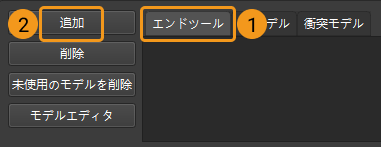
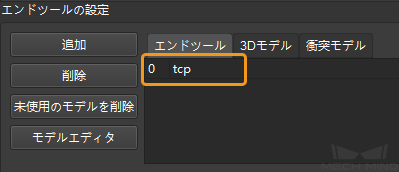
①-② エンドツール をクリックして 追加 をクリックします。 |
|
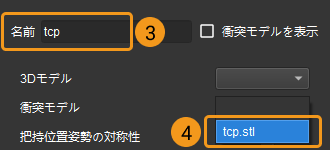
③-④ エンドツールの名前を付けて(本例ではtcpを使用)、追加された衝突モデルを選択します。 |
|
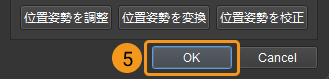
⑤ OK をクリックして設定を保存します。 |
|
設定が完了したら、追加されたモデル名がエンドツールのリストに表示されます。 |
|
TCPの調整¶
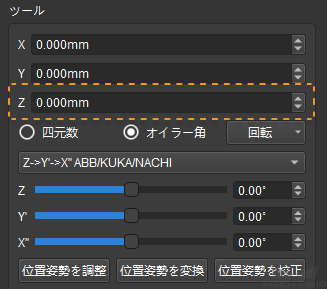
TCP(ツールセンターポイント)は、ドラッガーの中心点(ロボットモデルのエンドにある座標球)で表されます。プロジェクトでは、TCPはツールのエンドに配置する必要があります。
ツール名をダブルクリックし、その編集画面に入ります。対応するパラメータを変更してTCPの位置を調整します。本例では、TCPをZ軸の正方向に沿った一定の距離だけ移動します。
変更前 |
変更後 |
|
パラメータ変更 |
|

|
サンプル図 |
|
|
変更した後、 OK をクリックして設定が完了します。
対象物の設定¶
上記のエンドツールの設定が完了したら、対象物の設定を行います。
回転対称:通常、段ボール箱は上面が180°回転対称で、Z軸を中心に180°回転対称の直方体と見なすことができるため、 X/Y軸に関して対称性がない 、 Z軸のステップサイズ180° 、 試行範囲±180° に設定します。
把持範囲:通常、段ボール箱の把持シーンでは、段ボール箱の上面が吸盤表面に平行であり、把持点に従って把持しなければならないため、設定する必要はありません。
最適な把持の解選択戦略:段ボール箱の把持では、「デフォルト」または「最小の全体回転角度」に設定できます。これにより、ロボットが段ボール箱を把持した後の無駄な回転を回避し、段ボール箱の落下を防ぐことができます。
ツールと対象物の設定が完了したら、次の節に進んでシーンの設定を行います。