Mech-Centerを使用してロボット実機を制御して最初の把持を実現¶
これで、段ボール箱の位置姿勢を正常に取得し、 を正常にシミュレートしたことになります。次に、ロボット実機を実行して最初の把持を実現します。
ロボットの速度を調整¶
注意
ロボット実機を操作する前にその速度はを必ず遅くしてください。
Mech-Vizのツールバーでロボットの 速度と加速度 を5%に調整します。

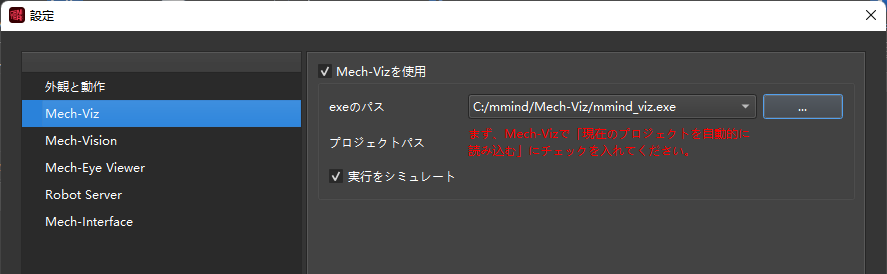
「実行をシミュレート」のチェックを外す¶
実行¶
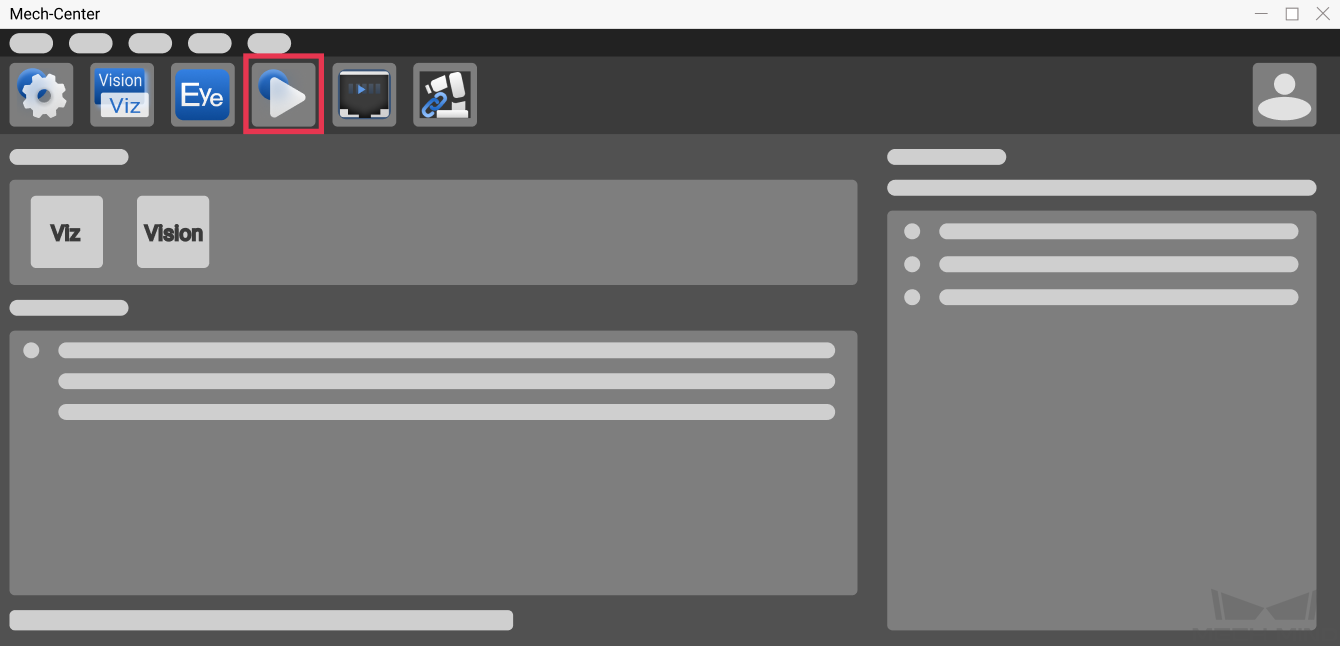
実行 をクリックした後、ロボットが計画された経路に従って移動し、段ボール箱の把持と配置を実行したら、最初の把持が成功したことになります。
注意
ロボットを実行するときは、人員の安全を確保してください。緊急事態が発生した場合は、ティーチペンダントの非常停止ボタンを押してください!
ここまで「最初の応用を始める」の説明は終わります。実際のニーズに応じてほかの節をお読みください。