Mech-Visionを使用して段ボール箱の位置姿勢を取得¶

本節では、Mech-Visionを使用して段ボール箱の位置姿勢を取得する方法について説明します。
事前準備¶
同じ寸法の段ボール箱を2つ用意し、寸法(長さ、幅、高さ)を記録します。
Mech-Mindが提供したキャリブレーションボード(ドットがはっきり見える、明らかなキズや曲げ、変形もない)を用意します。
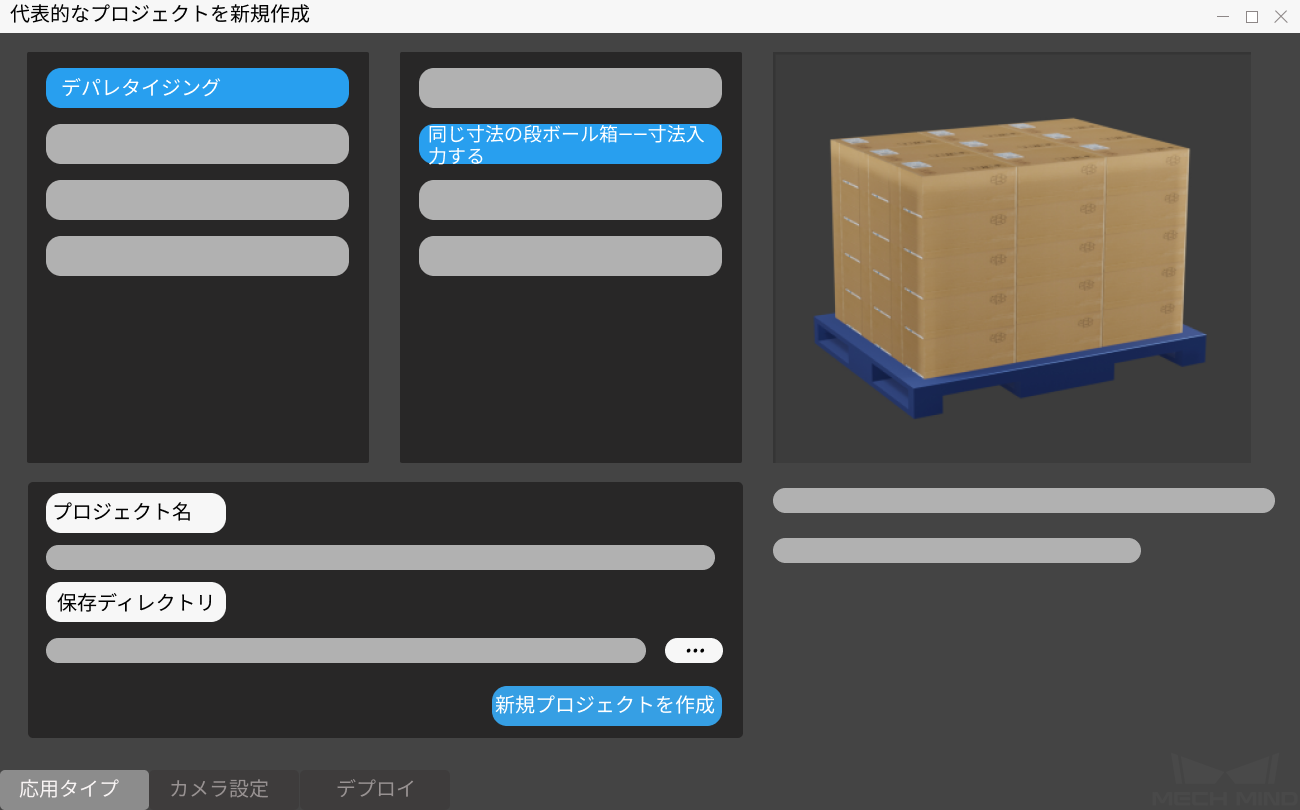
「代表的なプロジェクトを新規作成」でプロジェクトを作成¶
Mech-Visionソフトウェアを起動し、インターフェイスの上部にある を順番にクリックします。「代表的なプロジェクトを新規作成」画面が表示された後、 を選択し、プロジェクト名と保存ディレクトリを設定してプロジェクトを作成します。
カメラの設定とキャリブレーション¶
画面の指示に従ってください。
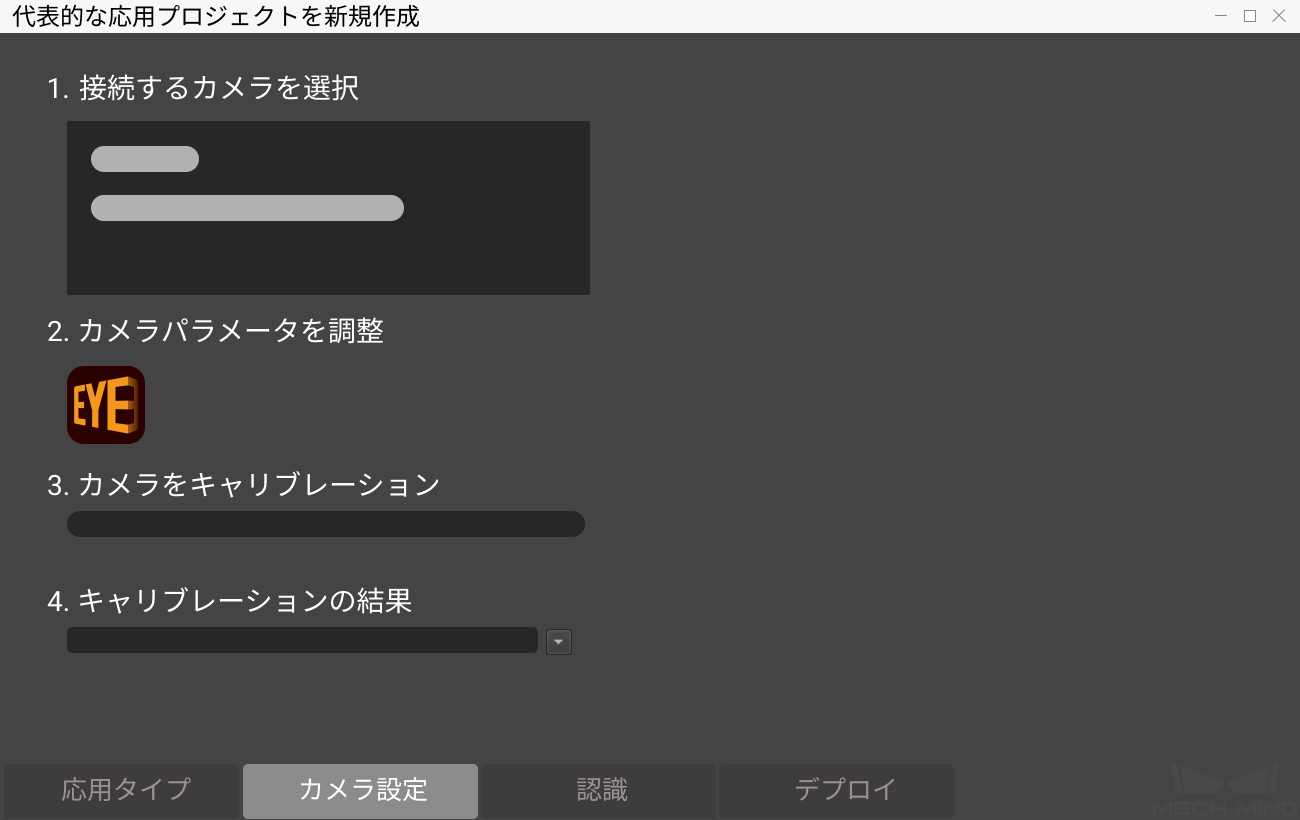
接続するカメラを選択:
カメラリストで接続するカメラをダブルクリックして、実際のカメラとの接続を試行します。接続が成功すると、残りのステップがアクティブになります。
カメラパラメータを調整:
Mech-Eye Viewerに組み込まれている「defult」のパラメータグループを選択します。
カメラをキャリブレーション:
キャリブレーショボードをロボットのフランジに取り付けます。
キャリブレーション開始 をクリックし、 ロボットハンド・アイ・キャリブレーションの使用ガイド を参照してキャリブレーションします。
キャリブレーショした後、キャリブレーションボードを取り外し、エンドツールを取り付けます。
キャリブレーションの結果:
前の手順で取得したキャリブレーション結果を読み込み、カメラ設定画面の操作はすべて完了します。
画面の下部にある 認識 をクリックして、次の操作を行います。
対象物認識に関するパラメータを設定¶
下図に示すように、次の手順を開始する前に、段ボール箱をカメラの視野中央にランダムに配置します。
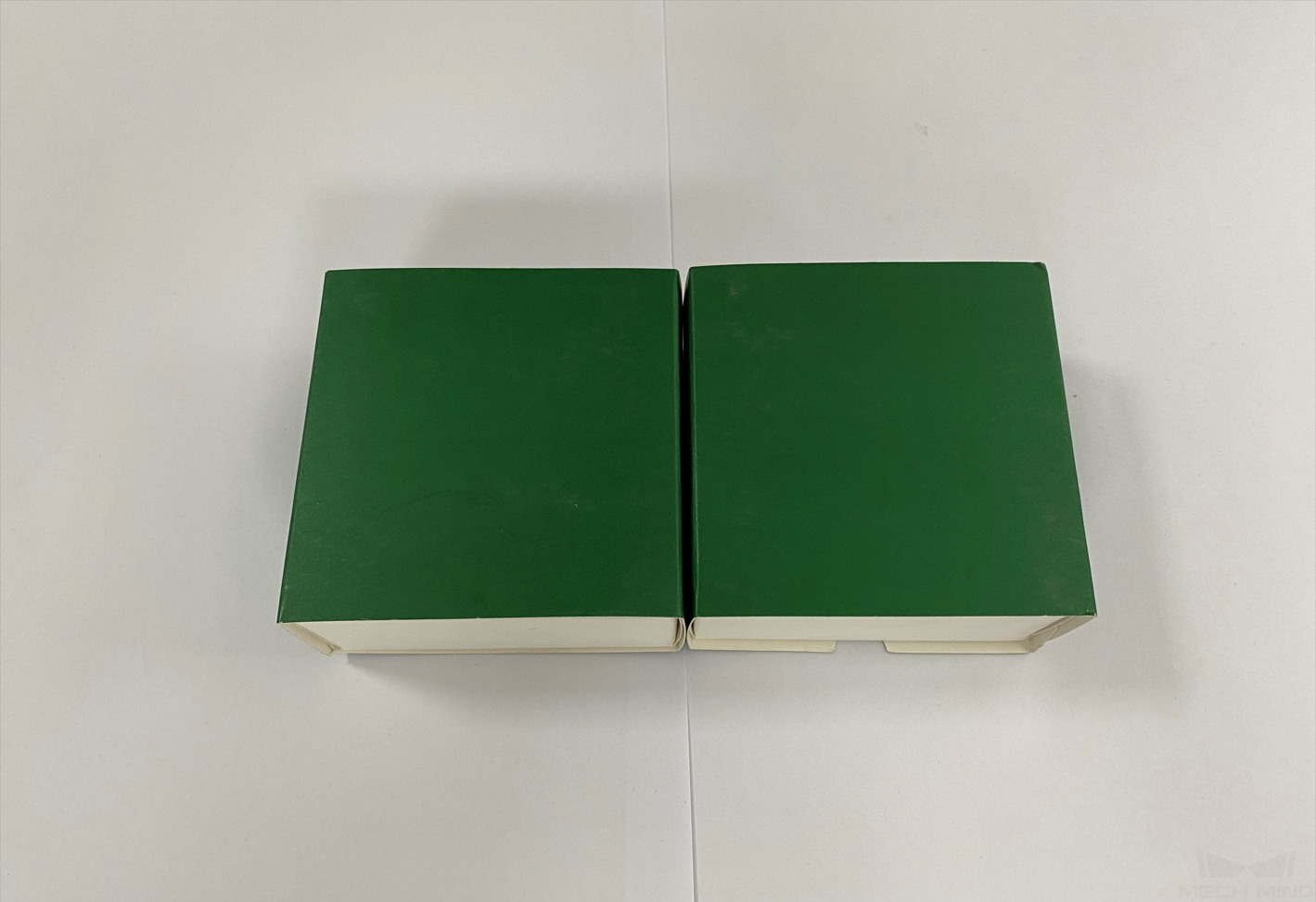
注意
認識対象物のみがカメラの視野内にあるようにしてください。これは、Mech-Eye Viewerで画像をキャプチャして確認できます。
箱の寸法:
事前に記録した箱の寸法をインターフェイスの右側にある「箱の寸法」に入力します。モデルパスとコンフィグファイルパスはソフトウェアによって事前設定されているため、変更する必要はありません。
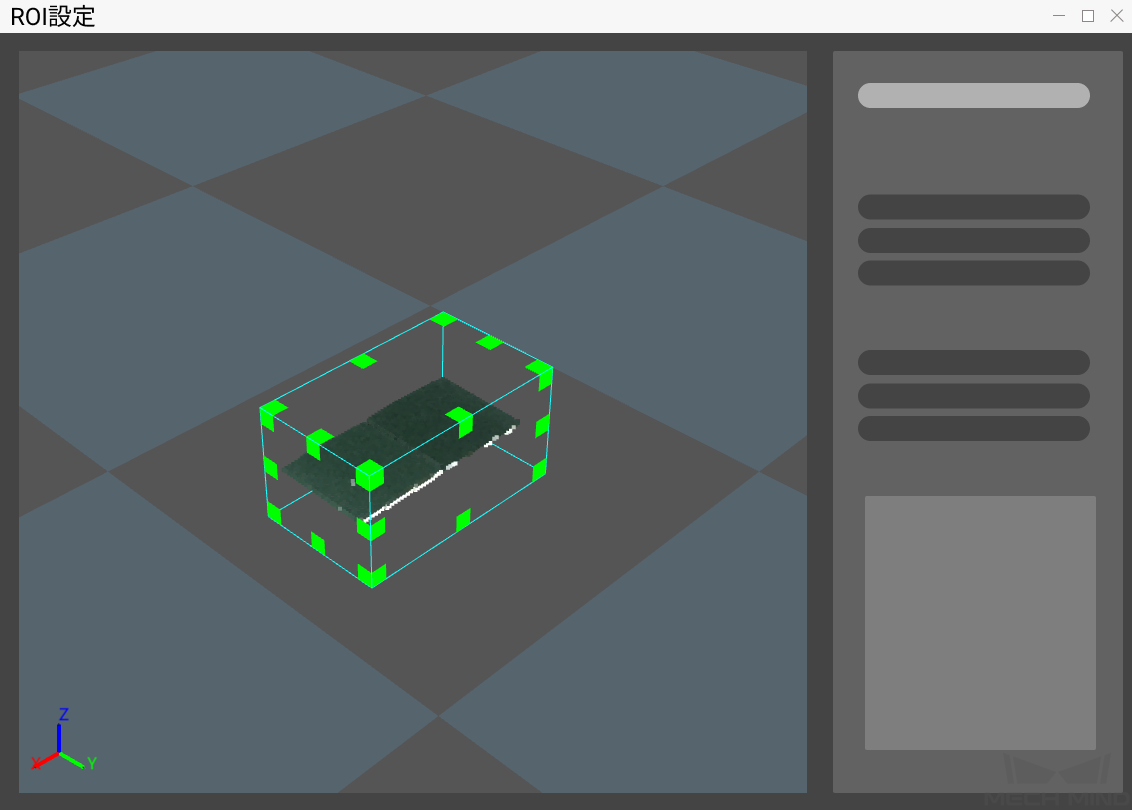
3D ROI:
インターフェイスの左上隅にある 3D ROI をクリックして、目標エリアの設定画面に入ります。この画面で関心領域(ROI)の設定を行います。
ボックスの端にある緑色のボックスを Ctrl + マウスの左ボタンでドラッグして、関心領域を調整します。
注意
調整された緑色のボックスは、すべての認識対象物を関心領域内に収める必要があります。
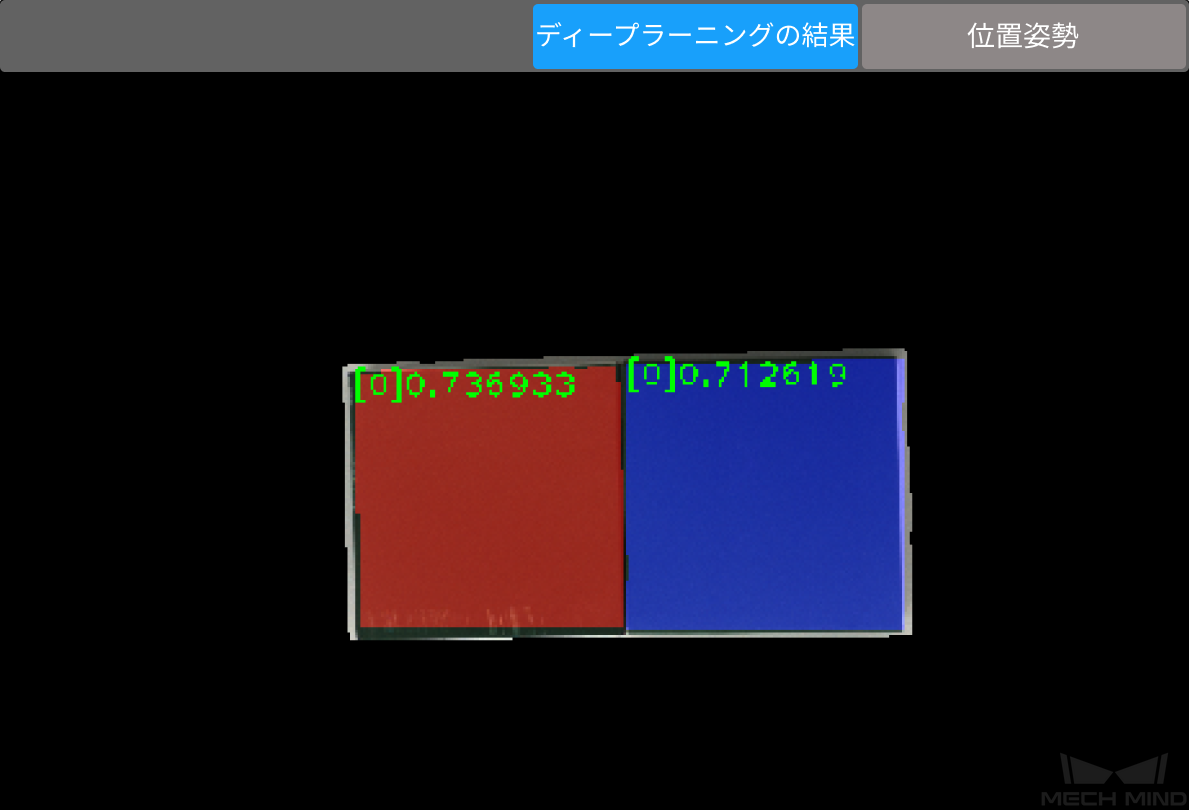
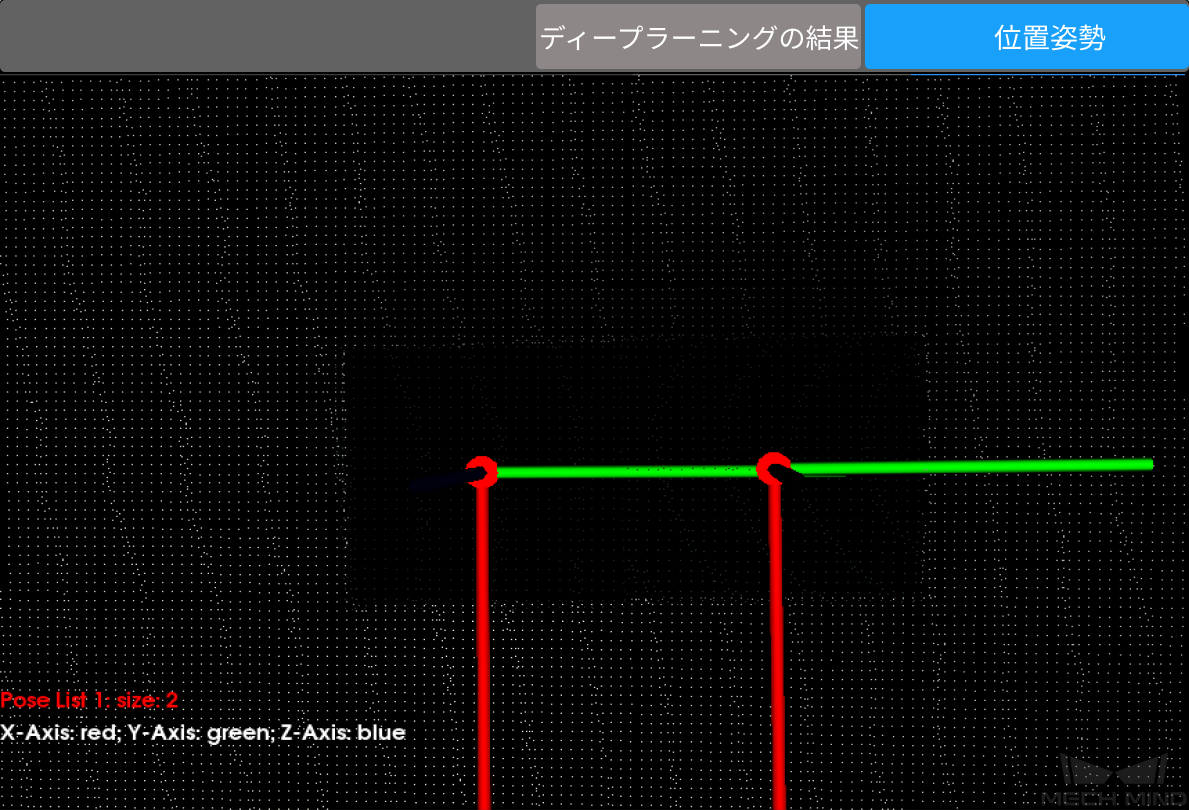
ディープラーニングの結果・位置姿勢:
位置姿勢を生成 をクリックすると、プロジェクト実行が開始され、ディープラーニングの結果と位置姿勢が出力されます。
ディープラーニングの結果
位置姿勢
プロジェクトの実行中にエラーが報告され、下図のようなディープラーニング結果が出力された場合は、デープラーニングの推論が失敗したことになります。
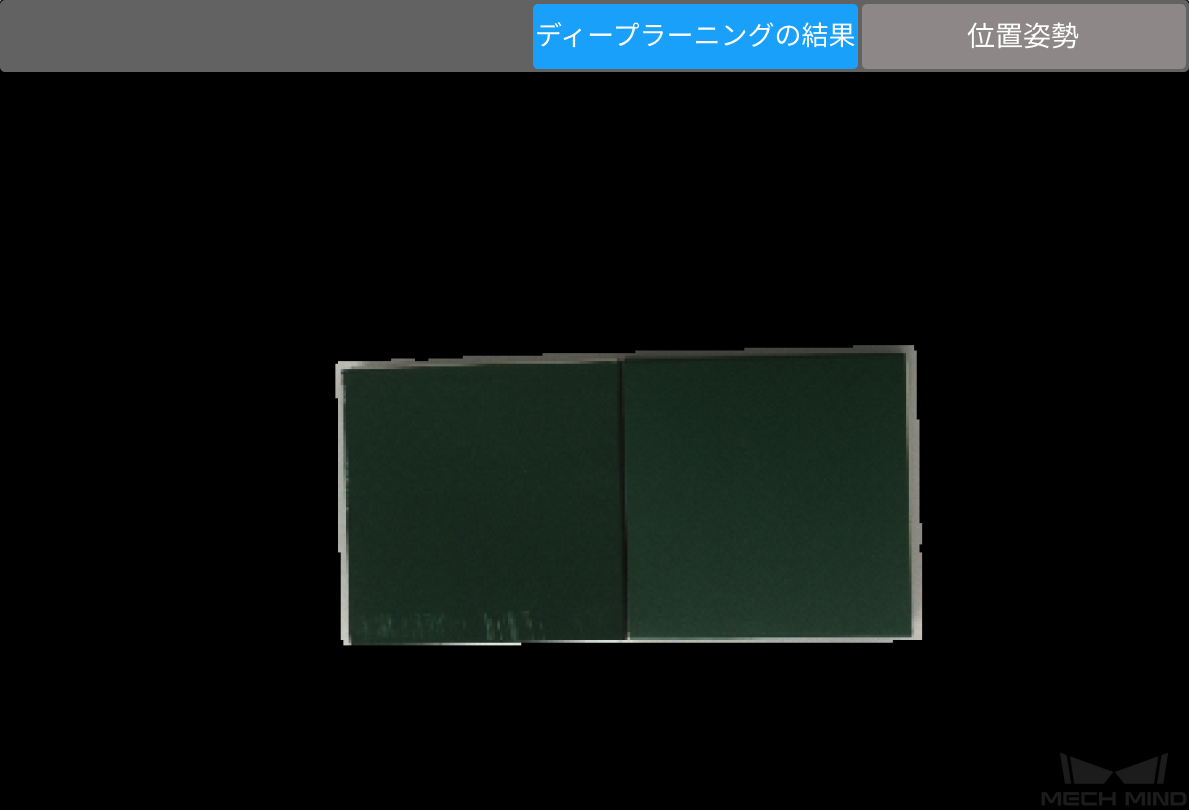
問題を解決するために次の解決策を試してください。
信頼度のしきい値を下げます。
入力した段ボール箱の寸法が実際の寸法と一致するかどうかを確認します。
3D ROIを再選択します。
カメラでキャプチャした画像を確認し、カメラのパラメータを調整します。
物体の配置を調整します。
結果を確認したら、インターフェイスの下部にある デプロイ をクリックして次の操作を行います。
デプロイを完了して最後の実行結果を確認¶
これで、プロジェクトの設定が完了しました。 終了 をクリックしてプロジェクトのデプロイを終了し、オペレーター・インターフェイス(カスタム)に入ります。
以上でMech-Visionを使用した操作は完了しました。次の節をお読みください。