シーンの設定¶
シーンモデルを追加することで実際のシーンを再現することができ、ロボットの動作経路を計画するのを役に立ちます。
本節は、以下の内容が含まれています。
シーンのモデルを追加¶
「シーン」パネルでシーンモデルを 新規作成 または 読み込む ことができます。下図に示すように、本例では モデルを読み込む ことでシーンのモデルを追加します。
本例のシーンモデルの格納場所はサンプルプロジェクトの sampleviz_ja¥models フォルダです。
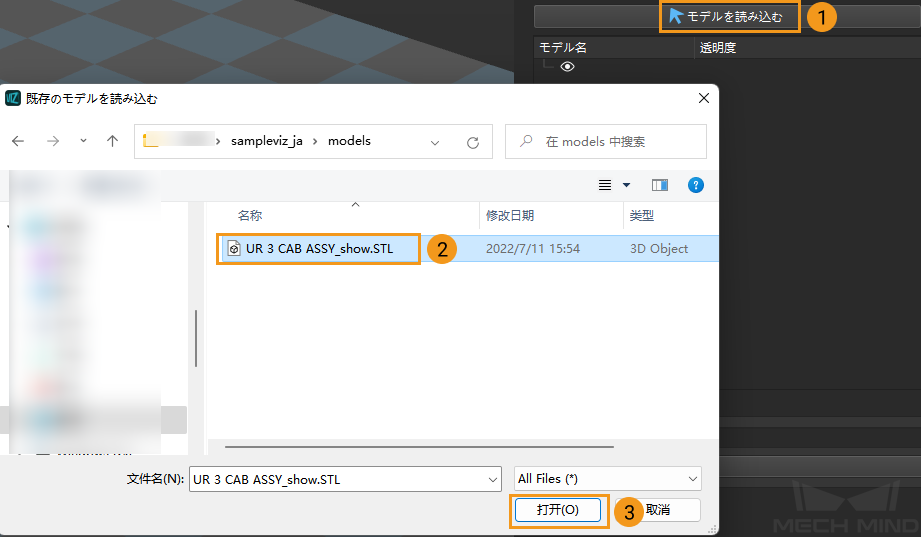
操作手順:
シーン をクリックします。
モデルを読み込む をクリックします。
用意したモデルを選択します。
開く をクリックします。
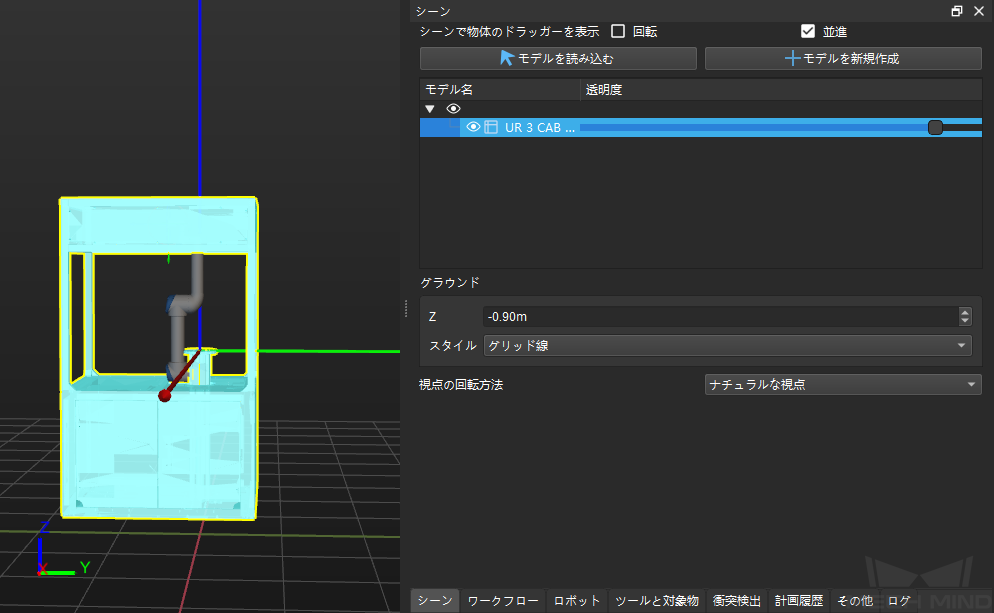
上記の手順に従って設定したら、モデル名がシーンモデルのリストに表示されます。また、シーンのモデルが3Dシミュレーションエリアで強調表示されます。
ヒント
追加されたモデルの位置が間違っている場合は、シーンの物体のモデルをクリックし、 回転 または 並進 にチェックを入れると物体のドラッガーが表示されます。 ctrl を押したまま、マウスの左ボタンでドラッガーの並進軸または回転軸を選択してドラッグし、モデルの位置姿勢を調整します。
シーンのモデルの透明度を調整¶
その後の動作経路計画を簡単にするために、スライダーを左にドラッグしてモデルの透明度を下げることができます。
パラメータ調整 |
表示効果 |
|
調整前 |

|
|
調整後 |

|
|
シーンの設定が完了したら、次の節に進んでワークフローの設定を行います。