ソフトウェア・ハードウェアシステム¶
ハードウェアシステムの構成説明¶
Mech-Mind株式会社の製品は、実際の応用で機能を実現するために完全なシステムに基づいている必要があります。通常の場合、システムには、 ロボット 、カメラ 、 コンピュータ の3つの主要モジュールが含まれます。3つのモジュールの通信には、イーサネット接続をお薦めします。
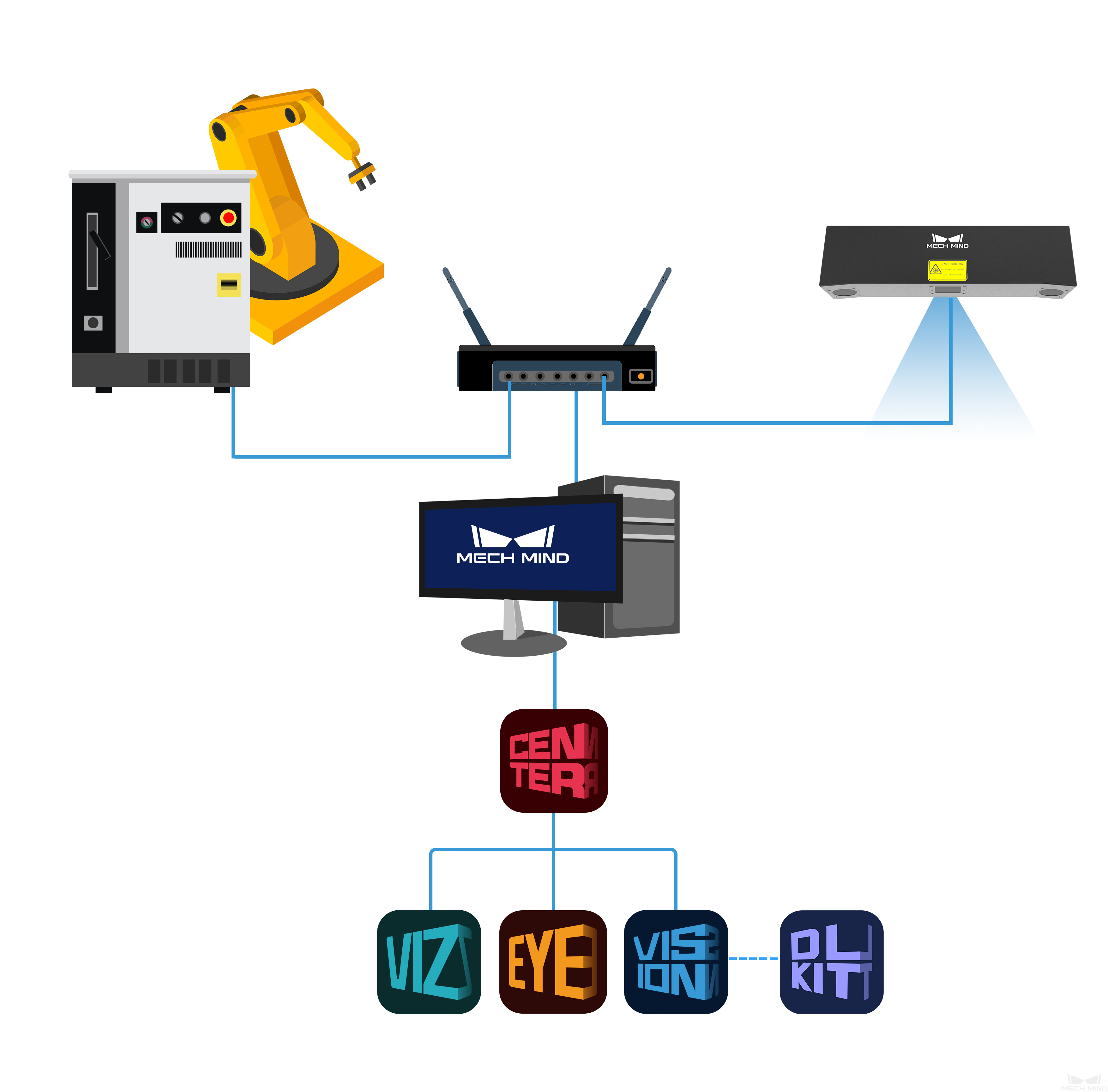
図1 ハードウェアシステムの構成¶
ソフトウェアシステムの構成説明¶
Mech-Mindのソフトウェアシステムには、主に次の2つの構築形式があります。
ソフトウェアシステムをマスター制御として
Mech-Mindのソフトウェアシステムには、ほとんどのロボットをビジョンシステムに接続して、ビジョンシステムによるロボットの完全な制御を実現できます。つまり、ビジョンシステムがマスターステーションであり、ロボットがスレーブステーションです。Mech-Mind株式会社が独自開発したMech-Vizソフトウェアは、ロボットの完全制御と動的シミュレーションを実現でき、経路計画、衝突検出、特異点回避などの多くの実用的な機能を備えています。この形式のシステム構築は、応用が簡単で、ロボットの稼働プロセスが簡単なシナリオで広く使用されています。ロボット/ホストコンピュータをマスター制御として
システムおよびロボットの稼働プロセスが複雑な場合、後のメンテナンスの利便性を考慮して、ロボットまたはホストコンピュータをマスターコントロールとして使用します。ビジョンシステムをスレーブステーションとして、位置姿勢のみまたは簡単な経路を送信します。ホストシステムは適切な時点でカメラをトリガーしてキャプチャし、ビジョンシステムは画像を処理した後、結果をホストコンピュータに返して一時的に保存します。ホストコンピュータは視覚的な結果が必要なときに直接呼び出すことができます。この形式のシステム構築では、通常、信号変換とリレー用に別々に作成されたadapterを使用する必要があります。適応されていないロボット、つまりビジョンシステムがロボットの完全な制御をまだ実現できない場合、位置姿勢を送信する形式のみを採用します。
Mech-Mindのソフトウェアシステムには、Mech-Mind株式会社が独自開発した Mech-Center 、Mech-Eye Viewer 、Mech-Vision および Mech-Viz が含まれています。詳細な紹介は、 Mech-Mindソフトウェアシステムの紹介 をご参照ください。