附录¶
使用 Mech-Viz 检测碰撞¶
配合 XXX/Mech-Center/tool/viz_project/check_collision 文件中的 check_collision.viz 工程使用,注意以下几点:
check_collision 工程只是一个示例工程,工程里除了移动类相关的技能,都是必须的,不可删除和不可更改其相对位置。其中的机器人模型请选择实际使用的型号。
可根据实际增删其中的移动类相关的技能。发送的位姿数量与移动类相关的技能数量一致。
若需要 Home 位置,在机器人端调用触发拍照指令之前调用一次设置位姿命令即可。
使用 Mech-Viz 吸盘分区功能¶
配合 XXX/Mech-Center/tool/viz_project/suction_zone 文件中的 suction_zone.viz 工程使用,注意以下几点:
suction_zone.viz 工程只是一个示例工程,工程里除了移动类相关的技能,都是必须的,不可删除和不可更改其相对位置。其中的机器人模型请选择实际使用的型号。
可根据实际增删其中的移动类相关的技能。发送的位姿数量与移动类相关的技能数量一致。
若需要 Home 位置,在机器人端调用触发拍照指令之前调用一次设置位姿命令即可。
使用前需要配置好吸盘文件。
机器人端需先调用触发拍照命令,再调用获取 DO 信号列表命令。
发送识别物体标签功能¶
给机器人发送的标签字段是一个标签码(整数表示)。需要在 Mech-Vision 工程中建立标签映射。
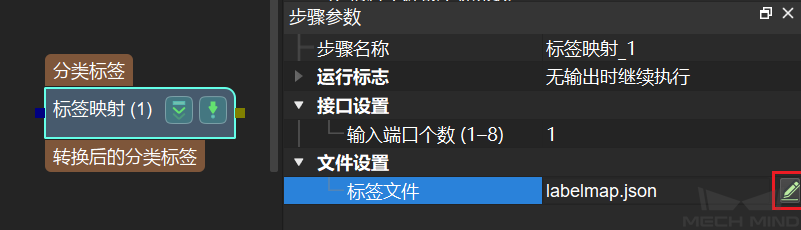
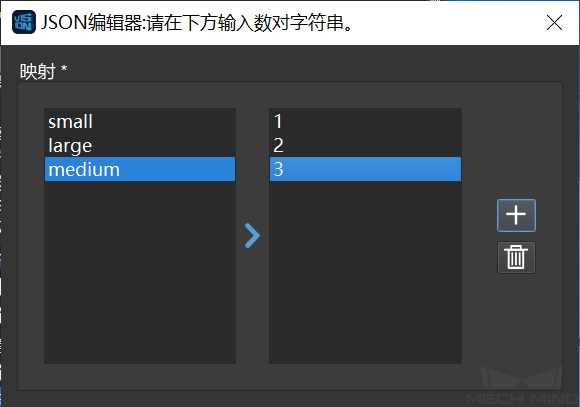
标签映射文件格式如下:
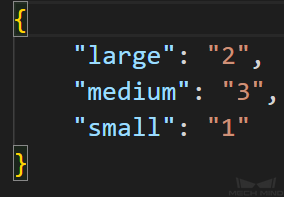
large 、small、medium 是标签字符串。
1、2、3是标签码。
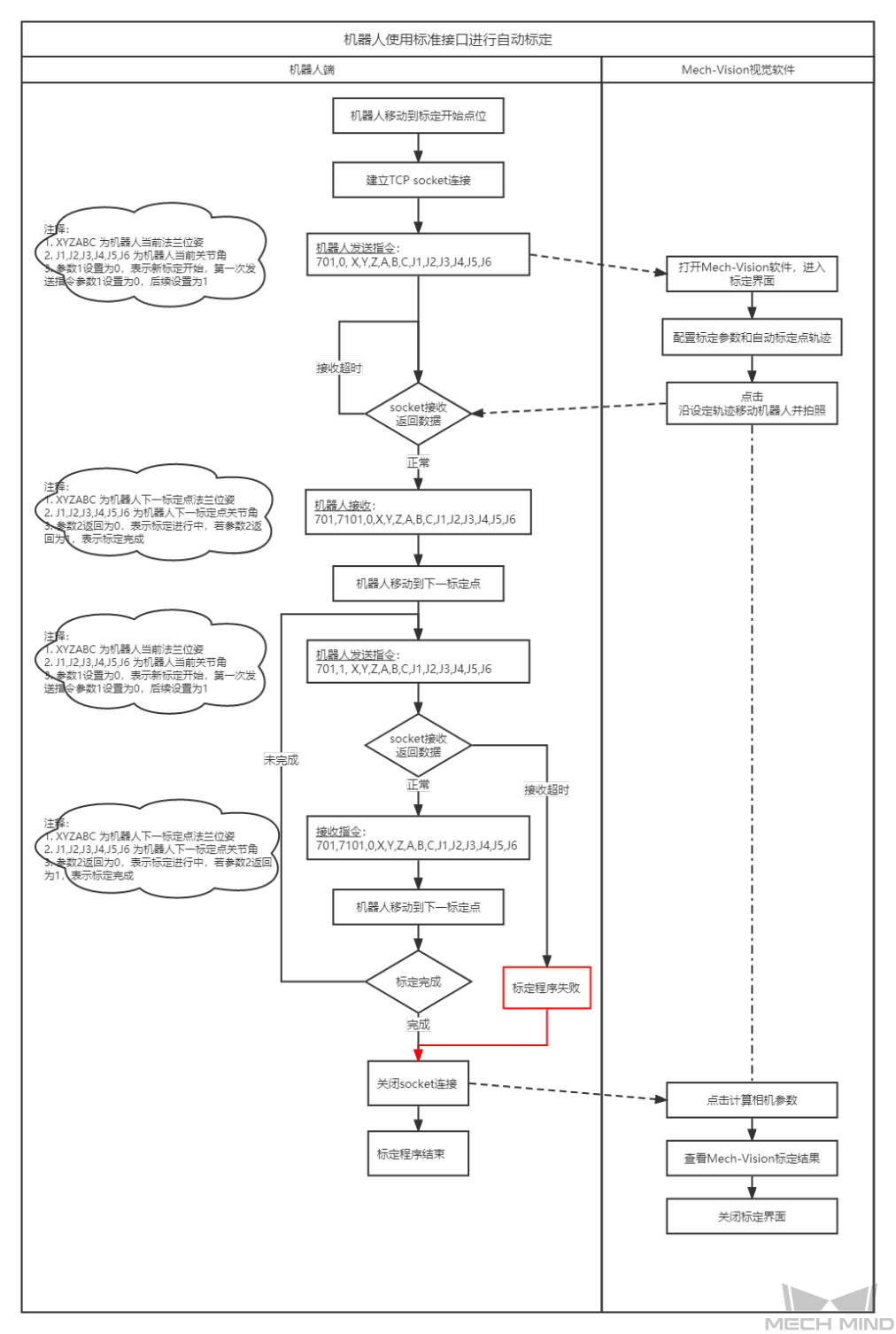
机器人自动标定程序流程¶
添加相机曝光完成¶
PROFINET 和 EtherNet/IP 协议的标准接口提供 相机曝光完成 信号,主要用于优化系统节拍。 当 Mech-Vision 工程运算时间较长,机器人需要在相机曝光完成之后立即移动位置。 相机曝光完成 信号的产生需要在 Mech-Vision 工程中进行一些必要的设置。
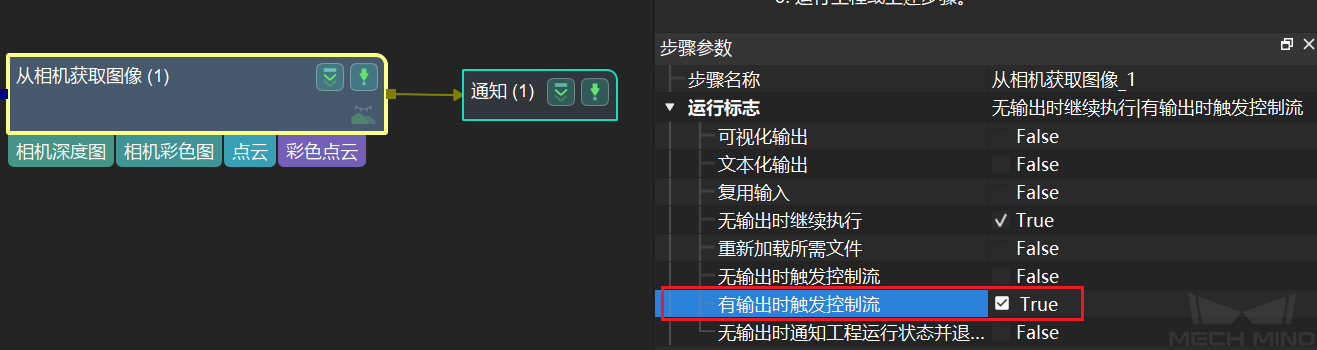
在 Mech-Vision 工程中添加一个 通知 ,连接在 从相机获取图像 的控制流上。设置 从相机获取图像 的 为 True 。
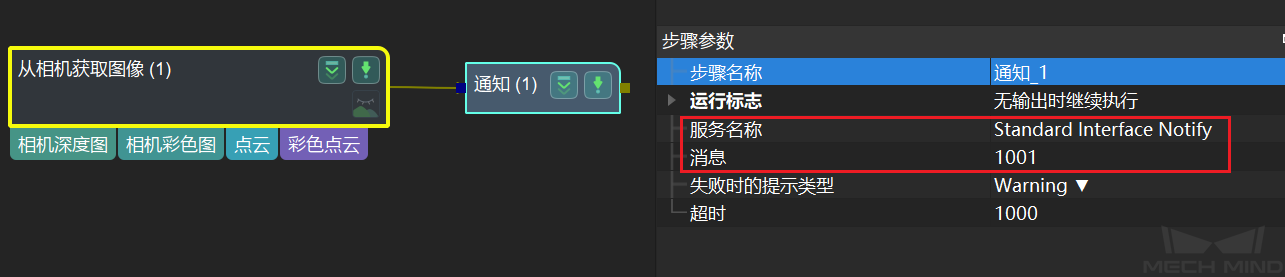
设置 通知 的服务名称为 Standard Interface Notify ,消息内容为 1001 (1001的消息内容不允许更改)。
运行 Mech-Vision 工程,当相机曝光完成时,PLC/机器人端会收到 Exposure_Complete 信号。 收到 Exposure_Complete 信号后,请使用 Reset_Exposure 信号将 Exposure_Complete 信号复位。 若10s内系统没有收到复位信号,将提示报错 Mech-Center数据确认信号超时 。