기타¶
실행 설정¶
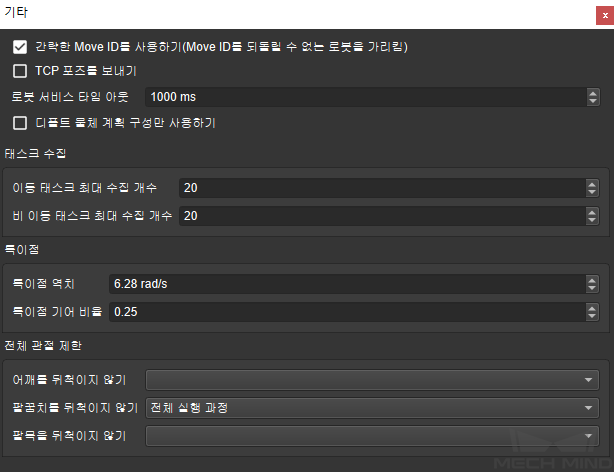
근사한 Move ID를 사용하기(Move ID를 보내지 못하는 로봇에 대해):Move ID를 보내지 못하는 로봇을 위해 근사한 Move ID를 계산하는 것입니다. 이를 통해 이미 발송한 Move가 이미 도달한지를 최대한 정확하게 알아내고 Move 발송을 간능한 한 끊기지 않게 만들어 로봇의 이동을 더 유창하게 만들 수 있습니다. 기본적으로 선택되지만 이 기능은 불안정할 때도 있어서 실제 사용 시 문제가 발생할 경우도 종종 있습니다. 문제가 나타나면 이 기능을 닫으세요.
TCP 포즈를 보내기:Mech-Viz에서 보내온 포즈가 JPS인지 혹은 TCP 포즈인지 전환하는 것입니다.
로봇 서비스 타임 아웃 :이동을 빼고 다른 요소가 로봇과 통신하는 데 시간 제한을 초과한 시간입니다. 设置DO , 检查DI 등 있습니다.
기본적인 물체 계획 구성만 사용하기:이 기능을 켜면 다종의 물체 레이블이 있는 경우에도 여전히 기본적인 물체의 대칭성을 사용합니다.
태스크 수집¶
이동 태스크 최대 수집 개수,비 이동 태스크 최대 수집 개수:Mech-Viz가 무한 루프가 되어 너무 많은 포즈를 보내는 것을 방지하면서 매번 발신하는 명령 수에 대해 제한합니다.
특이점¶
특이점 역치:궤적을 계획할 때 특이점 역치(관절의 최대 각속도 - 라디안 법)에 도달했는지 여부를 판단합니다. 일반적으로 디폴트 설정을 사용합니다. 특이점 감지에 보다 민감한 로봇을 사용하는 경우(예를 들어 소프트웨어 시뮬레이션 시의 궤적이 정상 상태인데도 불구하고 로봇이 실제적으로 그 궤적에 따라 이동하면 특이점 에러가 나옴) 이 값을 적절히 줄여 주세요.
특이점 감속비 :특이점이 나타나고 김속비가 이 값보다 큰 경우에 속도를 낮춤으로써 특이점 문제를 해결할 수 있다고 봅니다. 이 값을 적절히 작게 설정하면 “심각한 특이점”으로 인해 계획 실패 가능성을 낮출 수 있습니다.
전반 관절 제한¶
어깨/팔꿈치/손목을 뒤집지 않기 : 물체를 쥐고 있을 때 혹은 전반 실행 과정 두 가지 경우에 로봇의 불필요한 뒤집기를 줄일 수 있습니다. 하지만 어깨/팔꿈치/손목 모두 “뒤집지 않기”로 설정하는 것은 최적인 선택이 아닐 수도 있습니다. 예시는 다음과 같습니다:
로봇이 이동 중에 위의 제세가 나타나면, 로봇의 어깨/팔꿈치/손목이 뒤집할 때 각 축 간에 상호 관계가 존재함으로 강제로 손목을 뒤집지 않도록 설정하면 로봇이 보다 큰 각도로 뒤집할 수도 있습니다. 따라서 이런 경우에 어깨를 뒤집지 않기 및 팔꿈치를 뒤집지 않기 만 설정하는 것이 좋습니다.
참고
이동 태스크의 解系 의 우선 순위가 이 때의 전반 설정보다 높기 때문에 이동 태스크에서 설정을 하지 않으면 전반 설정이 발효될 것입니다.