로봇¶
로봇 탭 페이지의 주요 내용은 그림1과 같습니다. 다음으로 각 옵션의 기능과 사용 밥법을 설명하겠습니다.
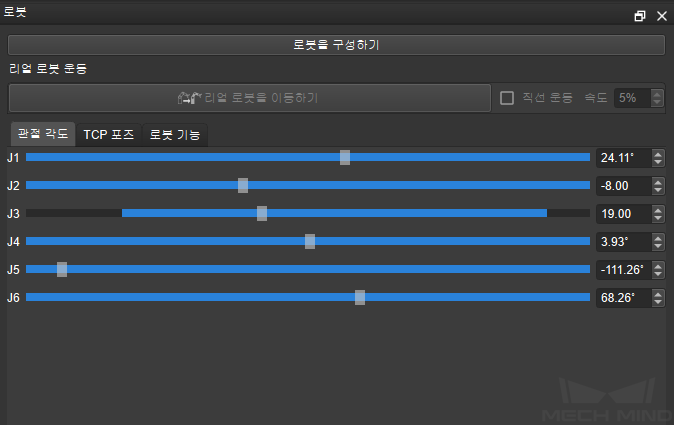
그림1 로봇 탭 페이지¶
로봇을 구성하기¶
로봇을 구성하기 를 클릭한 후 팝업 창에서 로봇의 브랜드 및 모델을 선택하여 로봇 모델을 도입할 수 있습니다. 그림2와 같습니다.
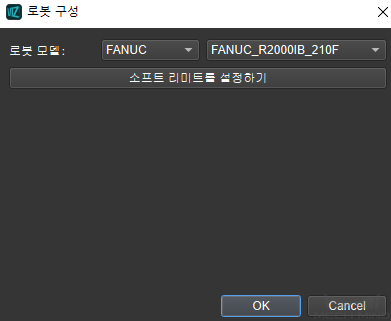
그림2 로봇을 구성하기¶
소프트 리미트를 설정하기 를 클릭하여 로봇의 각 축에 소프트 리미트를 설정할 수 있습니다. 소프트 리미트의 수치 범위가 이미 존재한 관절 각도의 수치보다 작으면 영향을 받을 Skill가 팝업 창에서 표시될 것입니다. 그림3과 같습니다.
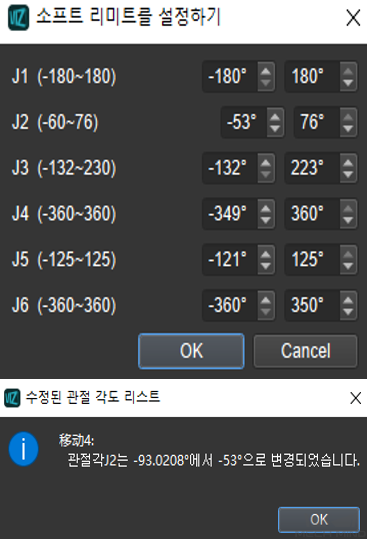
그림3 소프트 리미트를 설정하기¶
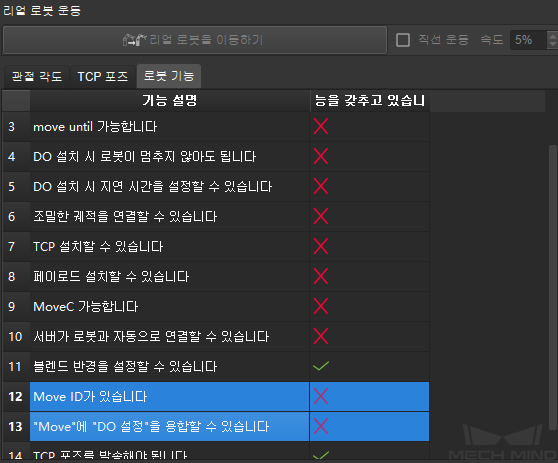
리얼 로봇 운동¶
리얼 로봇을 이동하기 를 클릭하면 로봇은 가상 로봇의 포즈로 이동할 것입니다. 리얼 로봇을 이동하기 의 오른쪽에 직선 운동을 선택하여 이동 속도를 설정할 수 있습니다.
관절 각도¶
관절 각도 옵션 밑에 가상 로봇의 현재 관절 각도 데이터가 표시됩니다. 리얼 로봇과 동기화하려면 리얼 로봇이 연결된 상태에서 툴 바에 있는 로봇을 동기화하기 버튼을 누르세요. 가상 로봇의 포즈를 조정하려면 각 축의 슬라이드 블록을 조정하거나 오른쪽의 입력 창에서 수치를 직접 입력하면 됩니다. 관절 각도 조정 버튼을 누르면 팝업 창에서 한번에 각축의 관절 각도 수치를 입력할 수 있습니다. 그림4와 같습니다.
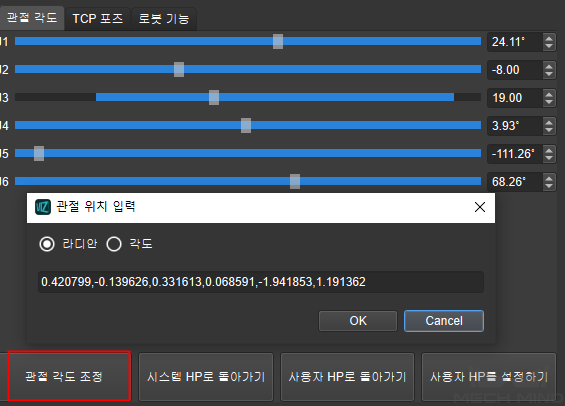
그림4 관절 각도 조정¶
시스템 HP로 돌아가기 버튼을 클릭하면 가상 로봇이 로봇 구성 파일에 설정된 초시 위치로 돌아갈 것입니다. 사용자 HP로 돌아가기 버튼을 클릭하면 가상 로봇이 사용자가 설정한 초시 위치로 돌아갈 것입니다. 이 위치는 인터페이스 오른쪽의 사용자 HP를 설정하기 를 통해 설정할 수 있습니다.
TCP 포즈¶
TCP 포즈 옵션 밑에 가상 로봇의 현재 툴 포즈 데이터가 표시됩니다. 사원수 및 오일러 각 버튼을 클릭하여 툴 포즈에 대해 조정할 수 있으며 포즈 조정 버튼을 클릭하여 툴 포즈를 직접 입력할 수 있습니다. 그림5와 같습니다.
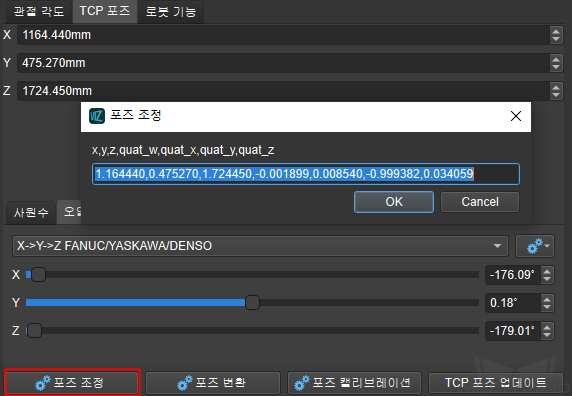
그림5 포즈 조정¶
포즈 변환 버튼을 클릭하면 변환의 방식에 대해 맞춤형 설정을 하여 현재 포즈를 새로운 포즈로 변환시킬 수 있습니다. 그림6과 같이 먼저 참조 좌표계를 선택하여 XYZ좌표, 사원수, 오일러 각을 설정하거나 변환 편집 버튼을 통해 직접 맞춤형 설정을 할 수 있습니다. 가상 로봇에 변환 결과를 실시간으로 표시할 것이고 이 결과를 저장하려면 Apply 를 클릭하며 결과를 버리려면 Cancel 를 클릭하여 가상 로봇은 원래의 위치로 돌아갈 것입니다.
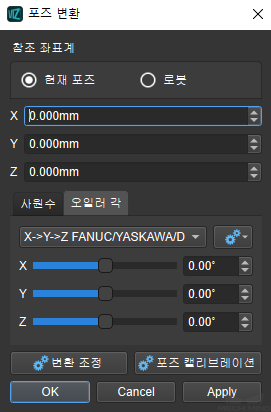
그림6 포즈 변환¶
그림7과 같이 포즈 캘리브레이션 버튼을 눌러 팝업창 힌트 내용에 따라 TCP포즈에 대해 캘리브레이션을 진행할 수 있습니다.
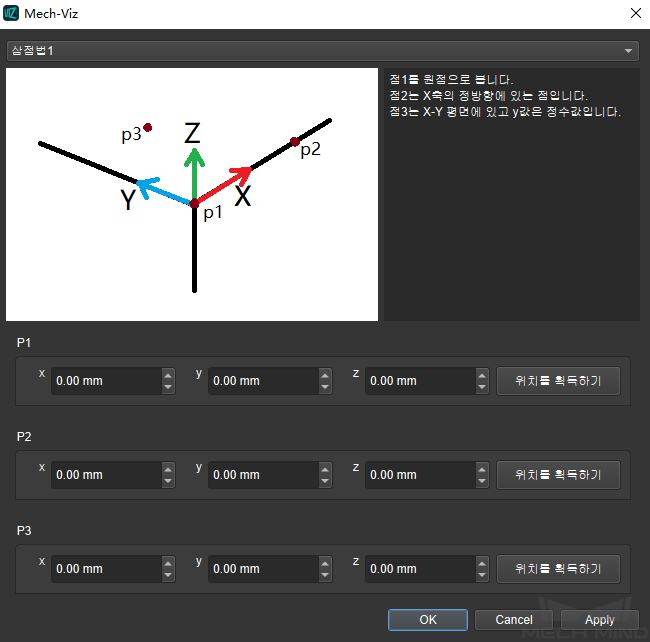
그림7 포즈 캘리브레이션¶
로봇이 이미 연결된 상태에서 툴 포즈 업데이트 를 클릭하면 Mech-Viz가 리얼 로봇에서부터 툴 포즈를 획득할 것입니다.
TCP 드래거를 표시하기¶
이 옵션은 가상 로봇 엔드 이펙터의 드래거를 가리킵니다. 회전 및 병진을 선택하면 사용자들이 가상 로봇에서 엔드 이펙터를 직접 드래그함으로써 툴 포즈를 더 직관적으로 조정할 수 있습니다.