태스크¶
태스크 페이지는 로봇 프로그래밍을 진행하는 주요 페이지입니다. 그림1과 같이 이 페이지는 주로 모듈 구역, 프로세스 기록 구역, 프로젝트 편집 구역 및 속도 설정과 파라미터 편집 구역 등 4 가지의 구역으로 구성됩니다.
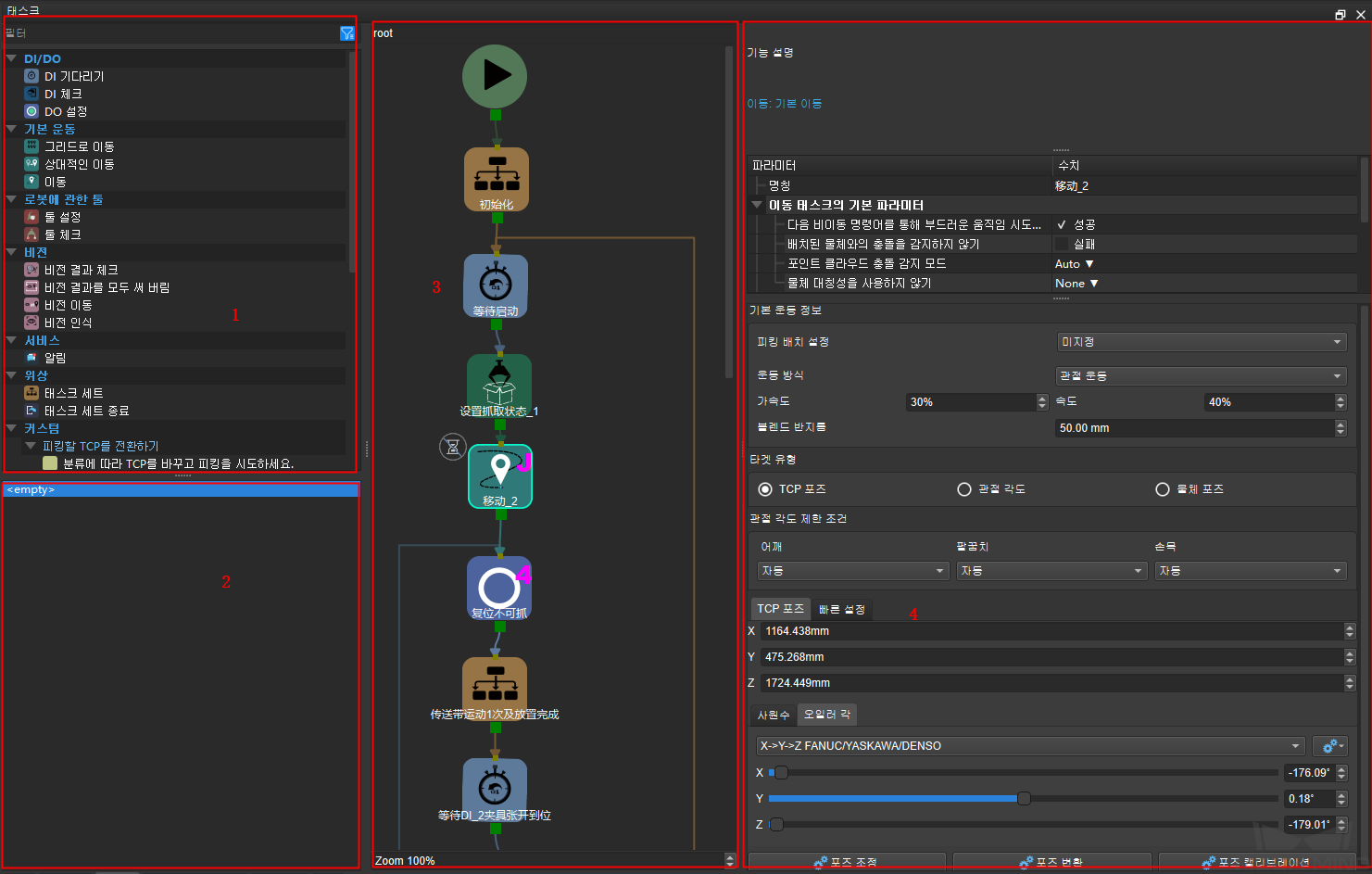
그림1 태스크 태그 페이지¶
모듈 구역
모듈 구역에 Mech-Viz의 다양한 기능을 실현할 수 있는 그래픽 프로그래밍 모듈이 포함되어 있으며 이러한 모듈은 Mech-Viz에서 로봇 프로그래밍을 하는 필수 조건입니다. 필요한 모듈을 프로젝트 편집 구역으로 드래거하고 관련 파라미터를 설정하여 프로젝트 실행 순서대로 연결하면 다양한 로봇 프로그래밍을 실행할 수 있습니다. 각 모듈의 자세한 정보 및 파라미터 설정 정보는 Mech-Viz 기능 소개 를 참고하세요.
프로세스 기록 구역
여기는 프로젝트 편집 구역에서 진행되는 모든 작업을 표시하는 구역입니다. 모듈 혹은 연결선의 추가 및 삭제를 포함하여 어떤 기록을 클릭하면 프로젝트 편집 구역은 해당 기록이 생성된 상태로 돌아갈 수 있습니다.
프로젝트 편집 구역
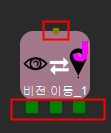
프로젝트 편집 구역은 각 모듈을 조합하여 로봇 프로그래밍을 실행하는 구역입니다. 중요한 것은 올바른 모듈과 연결선을 선택해야 합니다. 모든 모듈 위에 입력 포트(갈색 작은 박스)가 있고 밑에 출력 포트(녹색 작은 박스)가 있으며 출력 포트에서부터 입력 포트로 연결선을 통해 연결할 수 있습니다.
여러 개의 모듈을 한 태스크 세트로 조합할 수 있으며 메인 프로그램밍에 하나의 태스크 세트 모듈로 표시되어 프로그래밍이 더 간결하고 명확해질 수 있습니다. 태스크 세트를 두 번 클릭하여 편집할 수 있으며 지난 페이지 를 마우스 오른쪽 키로 클릭하여 지난 페이지로 돌아갈 수 있습니다. 또한 특정한 모듈을 빠르게 찾으려면 단축키 Ctrl+F를 클릭하여 프로젝트 편집 구역 위에 검색창이 나타나서 모듈 명칭을 입력하고 검색하면 됩니다.

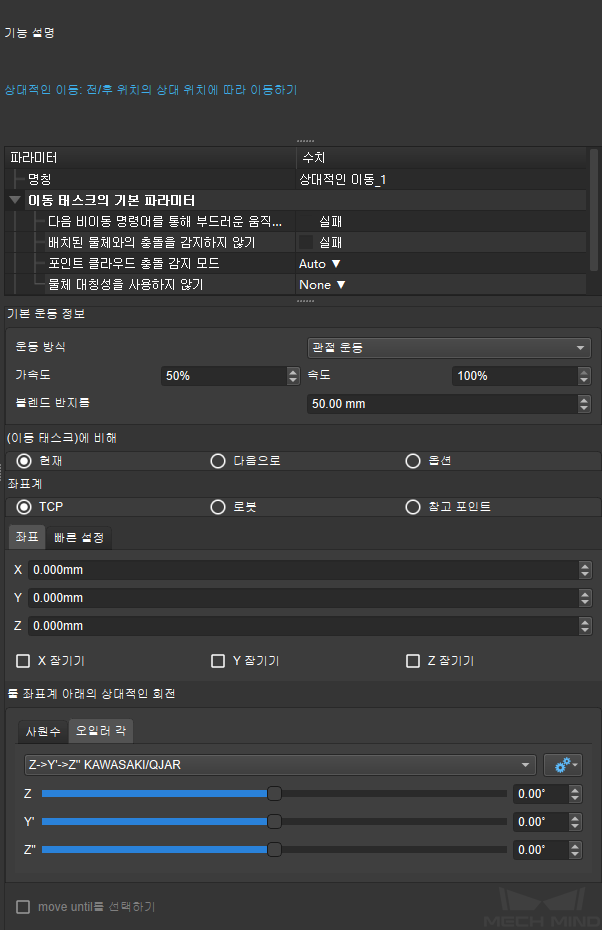
속도 설정과 파라미터 편집 구역
모듈이 선택되지 않은 경우 여기에 속도 설정과 관련된 옵션( 툴 최대 속도 및 전반 속도 비율 )만 표시됩니다.