기본 개념 소개¶

TCP[Tool Center Point](툴의 센터 포인트)¶
일반적으로 로봇에 주변 다른 물체와 상호작용을 실현하는 도구인 엔드 이펙터가 배치되어 있으며 TCP는 바로 엔드 이펙터의 팁 포인트입니다. 물체 피킹 등 태스크를 수행하기 위해 로봇이 공간에 있는 어떤 포인트로 이동하라고 하는 것은 본격적으로 TCP가 이 포인트로 이동하게끔 하는 것입니다.
관절 위치¶
로봇 각 관절의 위치의 뜻이고 관절 각도라고도 합니다. 관절 위치는 숫자의 세트이고 개수는 관절 축의 수량입니다. 예를 들어 6축 로봇 하나의 세트에 있는 관절 위치의 수량은 6입니다.
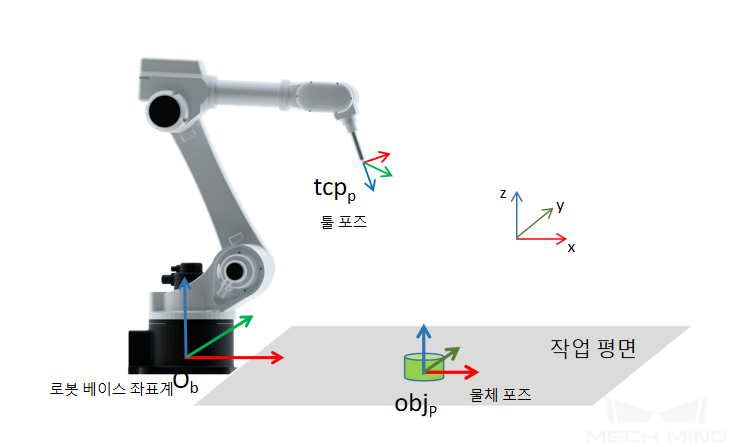
포즈¶
물체가 공간에 있는 위치 및 양상은 일괄적으로 포즈라고 합니다. 포즈는 병진+회전(사원수 혹은 오일러 각)으로 표시됩니다. Mech-Viz에서 말하는 포즈가 툴 포즈 및 물체 포즈로 나뉘집니다.
툴 포즈¶
로봇 베이스를 기준으로 하여 TCP의 포즈를 가리킵니다.
정방향 운동학¶
관절 위치에 의해서 툴 포즈를 계산하는 것입니다. 로봇의 관절 위치가 정해진다면 툴 포즈는 유일하고 확정된 것입니다.
역운동학¶
툴 포즈에 의해 해당하는 한 세트의 관절 위치를 계산하는 것입니다. 정해진 툴 포즈가 대응하는 관절 위치는 여러 개 존재할 수도 있으며 존재하지 않을 수도 있습니다.
피킹-배치¶
피킹-배치는 로봇과 물체 간의 상호작용의 방식입니다. 이동 태스크 에 대칭성 응용, 물체 포즈를 툴 포즈로의 전환을 바꾸서나 리셋하는 데에 사용됩니다.
피킹¶
로봇이 물체 포즈로 이동하고 외부 인터페이스 신호를 변화시킴으로써 엔드 클램프를 제어하여 물체를 피킹하는 과정은 피킹이라고 합니다. 《피킹》이 성공되면 물체와 로봇 TCP가 바인딩되어 있어 소프트웨어가 대칭성 에 의해 로봇 이동 궤적을 계획할 것입이다.
쥐고 있음¶
로봇이 물체를 피킹할 순간부터 배치할 때까지의 상태는“쥐고 있음”이라고 합니다. 이 상태에 물체와 로봇 간의 바인딩 관계가 여전히 존재합니다. 이 상태는 물체 피킹 후 자동으로 적용되고 소프트웨어에서 선택할 수 없습니다.
배치¶
로봇이 배치점 포즈로 이동하고 외부 인터페이스 신호를 변화시킴으로써 엔드 클램프를 제어하여 물체를 두는 과정은 배치라고 합니다. 《배치》가 성공되면 물체와 로봇 TCP 간의 바인딩 관계가 없어질 것입니다.
대칭성¶
모든 타겟 물체가 물체 포즈를 갖고 있습니다. 소프트웨어는 물체 포즈에 의해 툴 포즈를 산출하여 로봇 피킹을 제어합니다. 자세한 정보는 포즈 를 참고하세요. 실제 상황에서 흔히 보는 대칭성을 갖는 물체에 대해 로봇은 대칭성 각도 에 따라 다양한 피킹 혹은 배치 방식을 활용하더라도 결과는 똑같습니다.
대칭성 각도 :물체 혹은 피킹 포즈가 X/Y/Z축을 중신으로 α° 를 한번 회전하면 이전과 같은 것으로 간주할 수 있습니다. 예를 들어: 정사각형의 α°는 90°, 직사각형은 180°, 정육각형은 60°, 원 또는 링은 0°, 회전 없는 대칭은 360°입니다. 아래의 그림과 같습니다:

그 중에 Z축을 중신으로 하는 대칭성은 강한 축 대칭성이라고 하며 X/Y축을 중심으로 하는 대칭성은 약한 축 대칭성 이라고 합니다.
약한 축 대칭성 : 일반적으로 대칭성이 더 강한 축을 실제 계산에 쓰이는 약한 축으로 여기벼 다른 축의 대칭성을 무시합니다. 예를 들어: X축은 90°의 대칭성을 갖고 있으며 Y축은 0°의 대칭성을 잦고 있으면 Y축은 약한 축으로 간주하고 약한 축의 대칭성은 0°입니다.
서용자들은 물체의 대칭성을 설정하면 소프트웨어가 최적의 피킹&배치 궤적을 선택하여 접근성을 향상시키고 말단의 회전을 줄입니다.
물체 대칭성¶
물체 대칭성은 물체 포즈와 관련이 있습니다. 예를 들어 물체의 대칭성이 180°라면 로봇이 물체를 피킹/배치할 때 《장》 혹은 《반》 둘 중의 하나를 선택하여 말단 축의 회전을 줄일 수 있습니다. 아래의 그림과 같습니다:
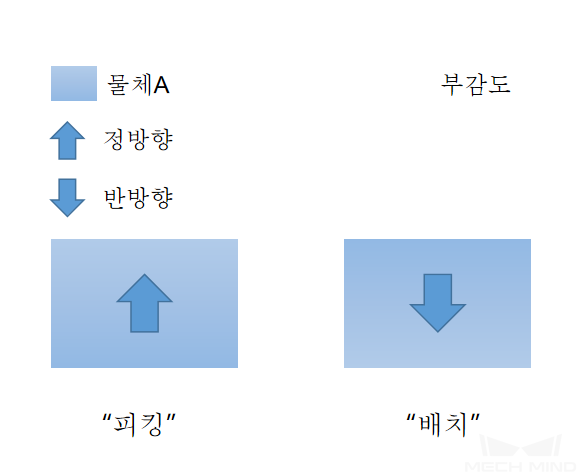
물체의 정&반 반향은 같은 상태로 간주할 수 있으니 로봇은 정방향 피킹 또한 반방향 배치 식으로 할 수 있습니다.
피킹 포즈 대칭성¶
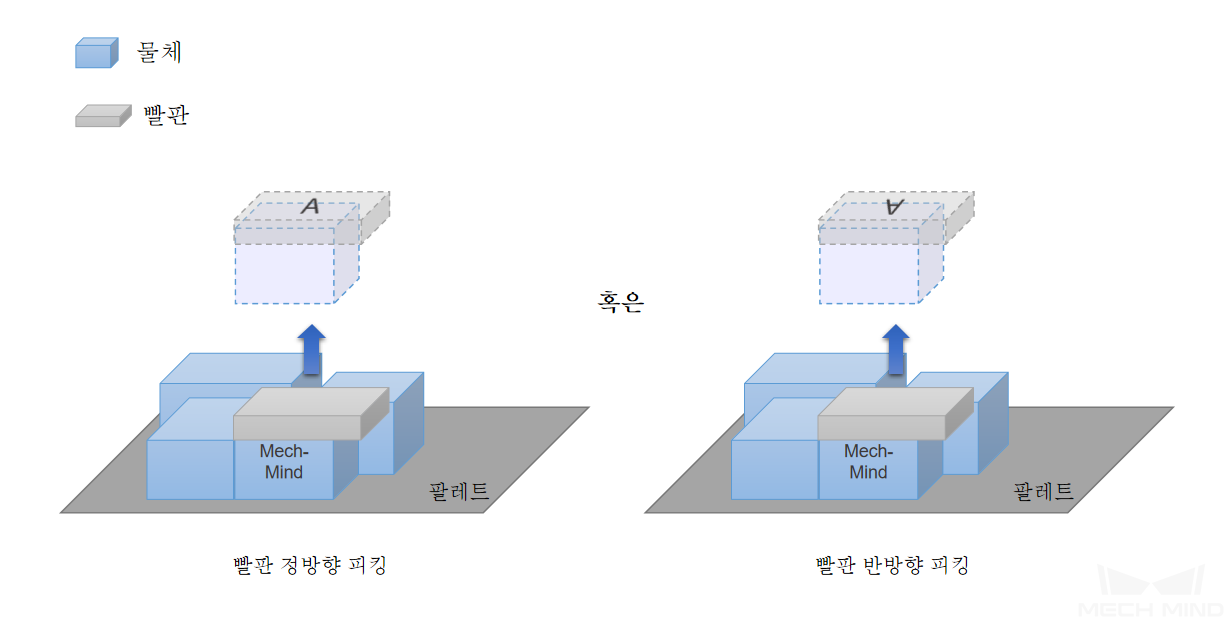
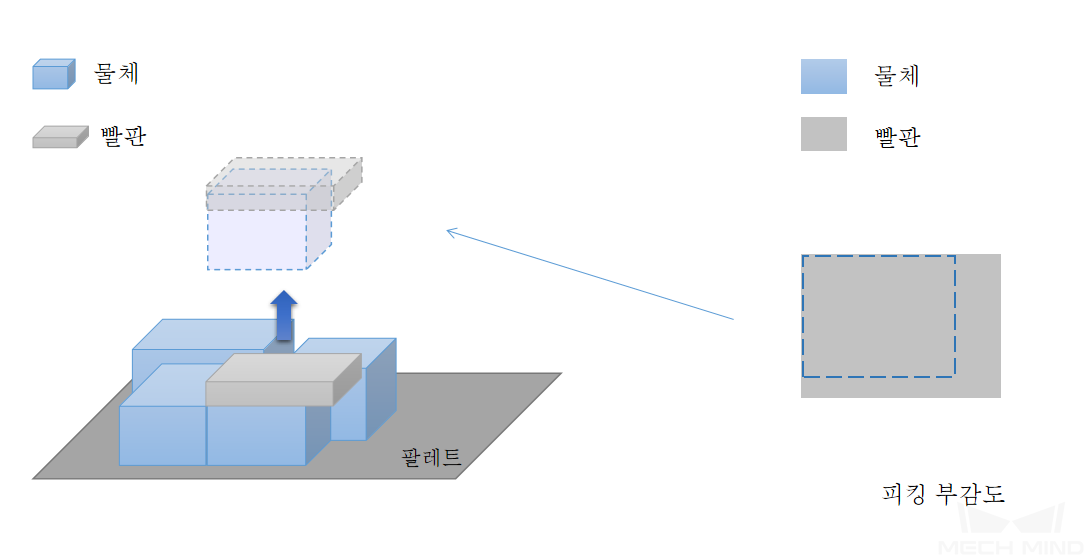
피킹 포즈의 대칭성은 피킹 툴이 물체를 피킹하는 방법과 관련이 있으며 최적의 피킹 포즈를 선택하는 데에 사용됩니다. 예를 들어: 물체의 사이즈가 빨판보다 작은 경우에는 피킹 과정 속에서 주변에 있는 다른 물체와의 충돌을 방지하기 위해 빨판 옵셋 식으로 피킹하는 것입니다. 이 때 물체의 대칭성은 사용되지 않으며 피킹 포즈의 대칭성은 180°입니다. 최초 피킹 포즈에 피킹 툴을 회전시키고 《정방향 피킹》 혹은 《반방향 피킹》을 선택할 수 있습니다. 아래의 그림과 같습니다:
최적의 이동 궤적을 계획하기 위해 피킹 시 소프트웨어는 피킹 포즈의 대칭성 및 물체 대칭성을 동시에 계산합니다. 《쥐고 있음》 및 배치 단계에 물체의 대칭성에 의해 물체 포즈를 선택할 것입니다. 예를 들어 타겟 물체가 연결봉인 경우에 그리퍼를 사용하여 링을 밖으로 피킹할 수 있습니다. 아래의 그림과 같습니다:
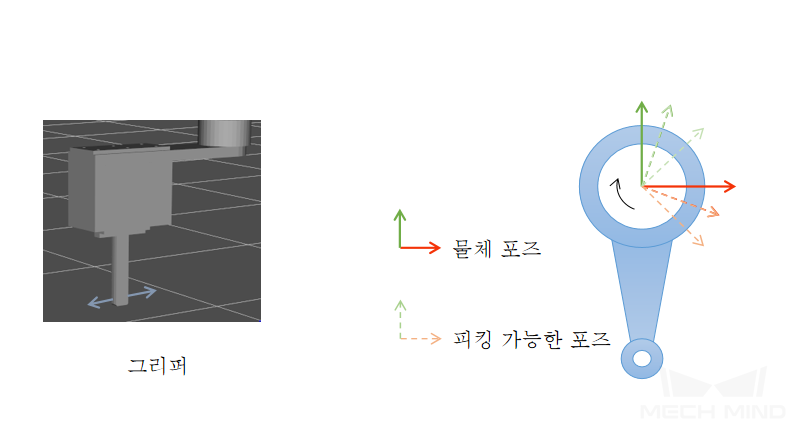
이 때 피킹 포즈의 대칭성은 0°이고 피킹 시 임의의 각도를 선택할 수 있습니다. 또한 피킹 포즈 대칭성은 구체적인 계산에 따라 적당한 스텝 길이(1°、10° 등)를 설정해야 합니다. 하지만 물체 대칭성이 없어서 설정한 물체 포즈대로 배치하려면 스프트웨어가 피킹 시 피킹 툴 및 물체 간의 상대 번환을 복구할 것입니다.
피킹 툴 옵셋¶
로봇이 비전 결과의 유도에 따라 피킹할 때 사이즈가 매우 작거나 모양이 복작한 경우에 다른 타겟 물체와의 충돌을 피하기 위해 피킹 툴의 중심점을 물체의 특정한 점으로 옵셋하여 피킹할 수 있습니다. 피킹 툴의 유형 및 옵셋 전략을 확인한 다음에 Mech-Viz를 통해 옵셋 값을 계산하고 포인트 클라우드 충돌을 결합하여 피킹 가능 여부를 판단합니다. 아래의 그림과 같습니다:
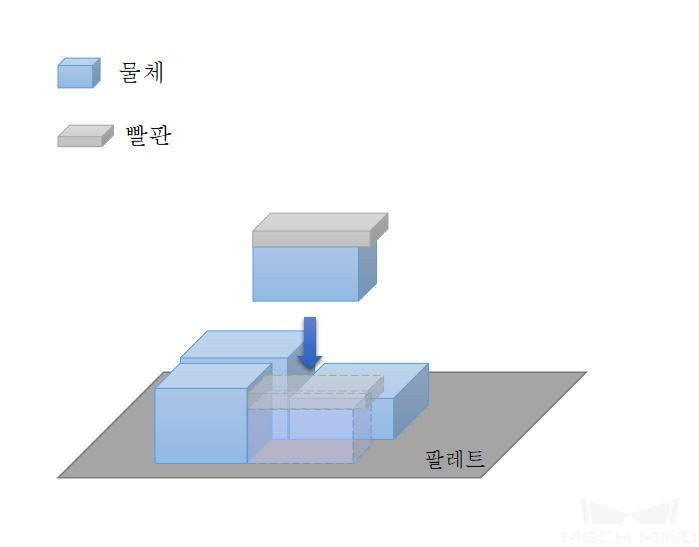
혼합 팔레타이징 경우에 로봇은 물체를 배치할 때 이미 옆에 배치된 물체와의 충돌을 피해야 하며 피킹 툴 옵셋으로 이 문제를 해결할 수 있습니다.
참고
옵셋과 관련된 자세한 정보는 Mech-Viz 사용 가이드 视觉移动 를 참고하세요.
충돌 모델 유형¶
Mech-Viz의 충돌 모델 유형은 주로 네 가지가 있습니다:
기본 입체(현재는 입방체만 가능): 이 유형의 모델은 주로 시나리오의 입방체 모델과 충돌 모델을 로드하지 않고 3D 모델만 로드한 엔드 이펙터입니다.
Mesh (표면 정보만 감지됨): 이 유형의 모델은 물체 표면만 대해 충돌 감지를 하고 주요한 모델은 로봇의 관절 및 STL 충돌 모델을 로드한 엔드 이펙터입니다.
볼록 다면체 어셈블리: 이 유형의 모델은 솔리드 물체로 충돌 감지를 수행합니다. 주요한 모델은 OBJ 충돌 모델을 로드한 엔드 이펙터입니다.
팔진트리: 이 유형의 모델은 주로 포인트 클라우드 및 binvox 충돌 모델 를 로드한 엔드 이펙터와 시나리오입니다.