충돌 감지 시각화¶
출돌 감지에 아래와 같이 충돌 감지 시각화와 관련된 설정을 할 수 있습니다.
충돌 감지 계산 및 기록 방식을 설정하기¶
주로 충돌 계산 및 충돌 기록 의 다른 방식을 선택하므로써 충돌 감지 시각화를 설정합니다. 그림1과 같습니다.
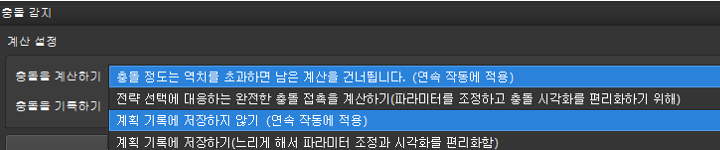
그림1 충돌 감지 시각화¶
충돌 계산 에서
전략 선택에 대응하는 완전한 충돌을 계산하기(파라미터 조정과 충돌 감지 시각화 위해)및충돌 정도가 역치를 초과하면 남은 계산을 뛰어넘기(지속적 실행을 위해)등 두 가지 방식을 선택할 수 있습니다.충돌 기록 에서
계획 기록에 저장하기(느림, 파라미터 조정과 충돌 감지 시각화 위해)및계획 기록에 저장하지 않기(지속적 실행을 위해)등 두 가지 방식을 선택할 수 있습니다.
둘 씩 결합하여 다음과 같은 네 가지의 경우를 얻을 수 있습니다:
충돌 계산 |
|||
전략 선택에 대응하는 완전한 충돌을 계산하기 |
충돌 정도가 역치를 초과하면 남은 계산을 뛰어넘기 |
||
충돌 기록 |
계획 기록에 저장하기 |
일반적으로 디버깅에 사용되고 모든 완전한 결과를 계산합니다. 시각화에 사용될 수 있지만 속도가 상대적으로 느립니다. |
역치를 초과하면 남은 계산을 진행하지 않고 여전히 시각화 가능하지만 일부 충돌만 표시됩니다. 또한 충돌을 허용할 수 없는 시나리오에서 한 포인트만 존재하는 시각화 결과가 거의 없습니다. |
계획 기록에 저장하지 않기 |
계획 기록에서 완전한 충돌을 표시할 수 있지만 충돌의 구체적인 위치를 시각화할 수 없습니다. |
일반적으로 안정된 생산 시나리오에 적용되고 충돌 정도가 역치를 초과할 때까지 계산하고 계획 기록에 저장하지 않습니다. 계산 속도가 빠릅니다. |
|
일반적으로 지속적 실행에 적용되는 두 가지 방식을 동시에 선택하거나 파라미터 조정과 충돌 감지 시각화를 위한 두 가지 방식을 동세에 선택하는 것이 좋습니다.
계획 실시 표시¶
메뉴 바에서 를 선택해야 합니다. 그리고 계획 기록 아래에 충돌 지속 표시 시산 및 만료 시간을 설정할 수 있습니다.