주의 사항¶
주의
포인크 클라우드와의 충돌 감지만을 통해 고정된 물체와의 충돌을 완전히 피할 수 없습니다. 고정된 물체는 시나리오에서 직접 모델을 추가하고 더 많은 제한 조건을 설정해야 합니다.
이는 설정된 포인트 클라우드와의 충돌 포인트 역치, 면적 역치 및 부피는 보통 오차(예를 들어 노이즈, 인식 오차, 클램프 옵셋 등)를 허용하는 데 사용되기 때문입니다. 또한 인식된 포인트 클라우드가 부족하거나 노이즈가 심각하면, 또한 빛 반사로 인한 포인트 클라우드가 많이 없어지면 포인트 클라우드 충돌 감지의 효과가 그리 좋지 않을 것입니다.
예를 들어 아래와 같은 상황에서 포인트 클라우드 총돌 감지만을 통해 충돌을 피하면 안 됩니다.
크랭크 축의 응용 시나리오에서 충돌 포인트의 역치는 100인데 100은 보통 크랭크 축의 포인트 클라우드 오차를 허용하는 것입니다. 만약에 피킹 용기의 테두리 부분에 있는 크랭크 축과 플램프가 충돌하지 않지만 클램프와 피킹 용기가 98 개의 포인트와 충돌하는 경우 피킹 용기의 모델을 추가하지 않았기 때문에 충돌을 감지하지 못합니다. 그리고 포인트 클라우드와의 충돌 포인트 수가 역치보다 적어서 소프트웨어가 충돌이 없다는 결론을 도출하여 피킹을 계획할 것입니다. 이렇게 하면 클램프가 피킹 용기와 충돌할 것입니다.
대부분 시나리오에서 포인트 클라우드는 가장 윗 표면에 대한 것입니다. 그림1과 같이 클램프가 위치하는 곳에 피킹 용기의 포인트 클라우드가 없기 때문에 클램프와 피킹 용기 간의 충돌을 감지할 수 없습니다.
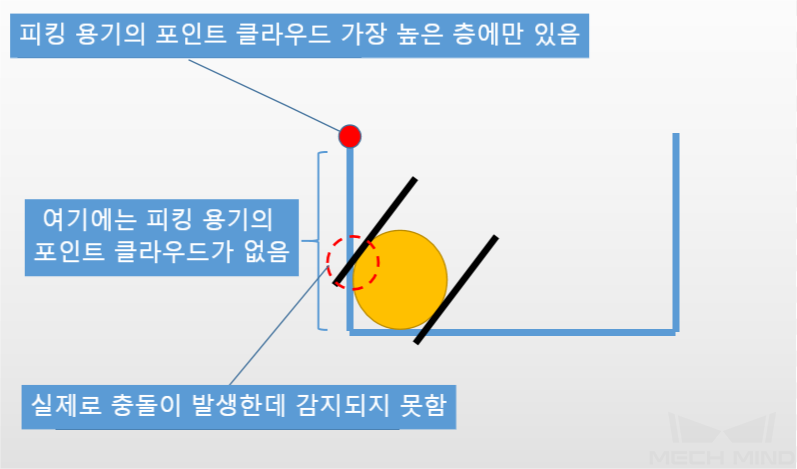
그림1 충돌을 감지하지 못하는 경우¶