末端工具¶
本文介绍末端工具及其相关配置。
简介¶
末端工具是为使机器人完成其任务而专门设计并安装在机械接口处的装置,例如夹爪、吸盘。
末端工具模型¶
为了能够在三维仿真空间中显示末端工具,并使末端工具参与碰撞检测,需要制作末端工具的显示模型和碰撞模型,并将其导入到软件的模型库中。
末端工具显示模型与碰撞模型支持格式说明:
格式
STL
OBJ
DAE
Binvox
显示模型
√
√
√
×
碰撞模型
×
√
×
×
提示
软件要求末端工具碰撞模型必须每个部分都是凸多面体(凸包)的 obj 模型,使用 模型编辑器 可为末端工具模型构建凸多面体并转换为 obj 格式。
显示模型只能用于在三维空间中显示,不参与碰撞检测;碰撞模型只能用于碰撞检测,不在三维空间中显示。
末端工具类型¶
Mech-Viz 支持的末端工具类型有常规工具、拆垛吸盘、工具阵列。
末端工具类型
说明
图示
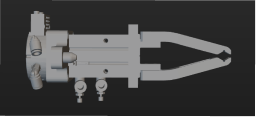
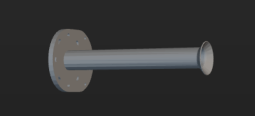
常规工具
所有非拆垛吸盘、非工具阵列类型的工具。典型代表有:气缸类抓具、单杆吸盘等。

拆垛吸盘
长方形拆垛吸盘类工具,支持多分区。

工具阵列
有多个末端且可以同时动作的末端工具类型。

末端工具对称性¶
工具对称性反映了末端工具绕自身对称轴旋转一定角度后其外形可以与旋转前重合的特性。 配置末端工具对称性可以减少机器人在抓取、放置过程中的末端旋转,提高规划成功率,减少规划时间,让机器人动作更加流畅、快捷。
无旋转对称

2次旋转对称
圆对称(任意角度旋转对称)
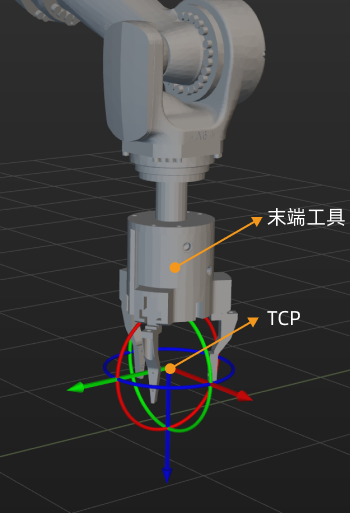
工具中心点(TCP)¶
末端工具用于抓放物体,当让机器人移动至空间的某一点进行抓放时,其本质是让 TCP 移动至该点, 默认的 TCP 位于机器人的末端,因此您需要调整工具中心点(TCP)到末端工具的尖端,以便准确模拟实际的抓放过程。
配置末端工具¶
导入末端工具的碰撞模型和显示模型¶
单击位于 的 + ,在弹出的窗口中选择碰撞模型文件与显示模型文件,单击 打开 。
添加末端工具¶
单击位于 的 + ,进入到末端工具配置窗口。
在 工具名称 文本框输入自定义的工具名称。
根据实际情况设置 工具类型 参数。
将 碰撞模型 参数设置为用于碰撞检查的末端工具模型。
将 显示模型 参数设置为用于在三维仿真空间显示的末端工具模型。当显示模型的位置与大小与实际情况不一致时,参考 调整末端工具模型的位置或大小 进行调整。
根据实际情况,将 旋转对称 参数设置为 无对称 、 N次对称 或 圆对称 。如果参数设置为 N次对称 ,还需要设置 对称次数 参数。
使用以下任一方式设置 TCP。
从机器人更新 TCP
单击此按钮后可将真实机器人的 TCP 状态同步至软件。
TCP 标定
控制机器人绕固定点旋转来记录多组法兰位姿进而计算 TCP。
修改 TCP 参数
修改欧拉角或者四元数的各项参数。
使用精确的 TCP 位姿数值
若已通过其他方式获取了精确的位姿数值,可将其粘贴到编辑位姿工具中。
当您使用的是常规工具时,无需配置控制逻辑,当您使用的是吸盘或工具阵列时,请参考 配置末端工具的控制逻辑 继续完成控制逻辑配置。
最后单击 确定 。
如果需要,重复以上步骤添加更多末端工具。
设置当前工具¶
当只添加了一个末端工具时,这个工具就是当前工具。 当添加了多个末端工具时,默认添加的第一个末端工具为当前工具。
若需将末端工具设置为当前工具,请在 中右键单击末端工具,在弹出的菜单中单击 设置为当前工具 。
调整末端工具模型的位置或大小¶
当您添加的末端工具模型没有处在正确的位置时,执行如下步骤:
双击 中的末端工具模型文件。
在弹出编辑模型变换窗口中修改位姿参数,从而调整末端工具模型在三维仿真空间中的位置。
当您添加的末端工具模型大小与实际情况不匹配时,执行如下步骤:
双击 中的末端工具模型文件,
在弹出编辑模型变换窗口中:
如果想调整模型整体缩放比例,修改 比例 参数。
如果需要在 X、Y、Z 方向上单独设置缩放比例,取消勾选 x,y,z相同比例 ,然后分别设置 X、Y、Z 方向的缩放比例。